
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Технологическая карта работы в модуле
4.2. Практическое занятие №11 Теоретический материал
В условиях кручения в поперечных сечениях стержневой конструкции возникают касательные напряжения под действием внутреннего крутящего момента, которые в опасных точках сечения вычисляются по следующей формуле:
где Мz – величина внутреннего крутящего момента в данном сечении, Wρ – полярный момент сопротивления – геометрическая характеристика поперечного сечения. Для круглого сечения c диаметром d полярный момент сопротивления
Условием прочности по допускаемому напряжению при кручении считается выполнение следующего неравенства:
где [τ ] – величина допускаемого напряжения, являющаяся справочной величиной или определяемая по характеристикам прочности для данной марки материала как: Алгоритм расчета на прочность 1. Определить положение опасного сечения: · Построить эпюру крутящего момента Mz · Определить величину максимального касательного напряжения:
2. Записать условие прочности:
Согласно гипотезе Бернулли круглые и плоские поперечные сечения стержня до приложения крутящего момента остаются круглыми и плоскими и после его воздействия, поворачиваясь при этом вокруг продольной оси на некоторый угол. Таким образом, перемещением при кручении считается φ – угол закручивания поперечных сечений вокруг продольной оси стержня. Чтобы оценить деформацию стержня при кручении, рекомендуется построить эпюру распределения углов закручивания φ вдоль оси конструкции. Алгоритм построения эпюры углов закручивания. 1. Выбрать начало координат для отсчета перемещений поперечных сечений (если стержень имеет жесткую заделку, то рекомендуется принять начало координат в заделке). 2. Разделить стержень на участки, в пределах каждого из которых неизменны функция крутящего момента и размер поперечного сечения. 3. Начиная от начала координат, определить абсолютную деформацию каждого участка · для участка без распределенного момента по формуле:
где · для участка с распределенным моментом по формуле:
3. Определить перемещение (угол закручивания) каждого граничного сечения стержня относительно выбранного начала координат как накопленную сумму абсолютных деформаций участков, предшествующих данному сечению: 4. По значениям полученных перемещений построить эпюру
Условие жесткости при кручении принято записывать либо в абсолютных, либо в относительных (погонных) углах закручивания. Погонным углом закручивания i-го участка стержня называется величина Под условием жесткости, записанным в абсолютных углах закручивания, понимается ограничение максимального угла закручивания сечений стержневой конструкции в результате деформации кручения величиной допускаемого перемещения:
где Под условием жесткости, записанным в относительных углах закручивания, понимается ограничение максимального относительного (погонного) угла закручивания участков стержневой конструкции в результате деформации кручения некоторой допускаемой величиной:
где Алгоритм расчета на жесткость по абсолютным углам закручивания. 1. Построить эпюру углов закручивания 2. По эпюре определить максимальный по абсолютной величине угол закручивания, подставить в условие жесткости: Алгоритм расчета на жесткость по относительным углам закручивания. 1. Найти погонные углы закручивания для каждого участка стержня по формуле: 2. Определить максимальный по абсолютной величине погонный угол закручивания:
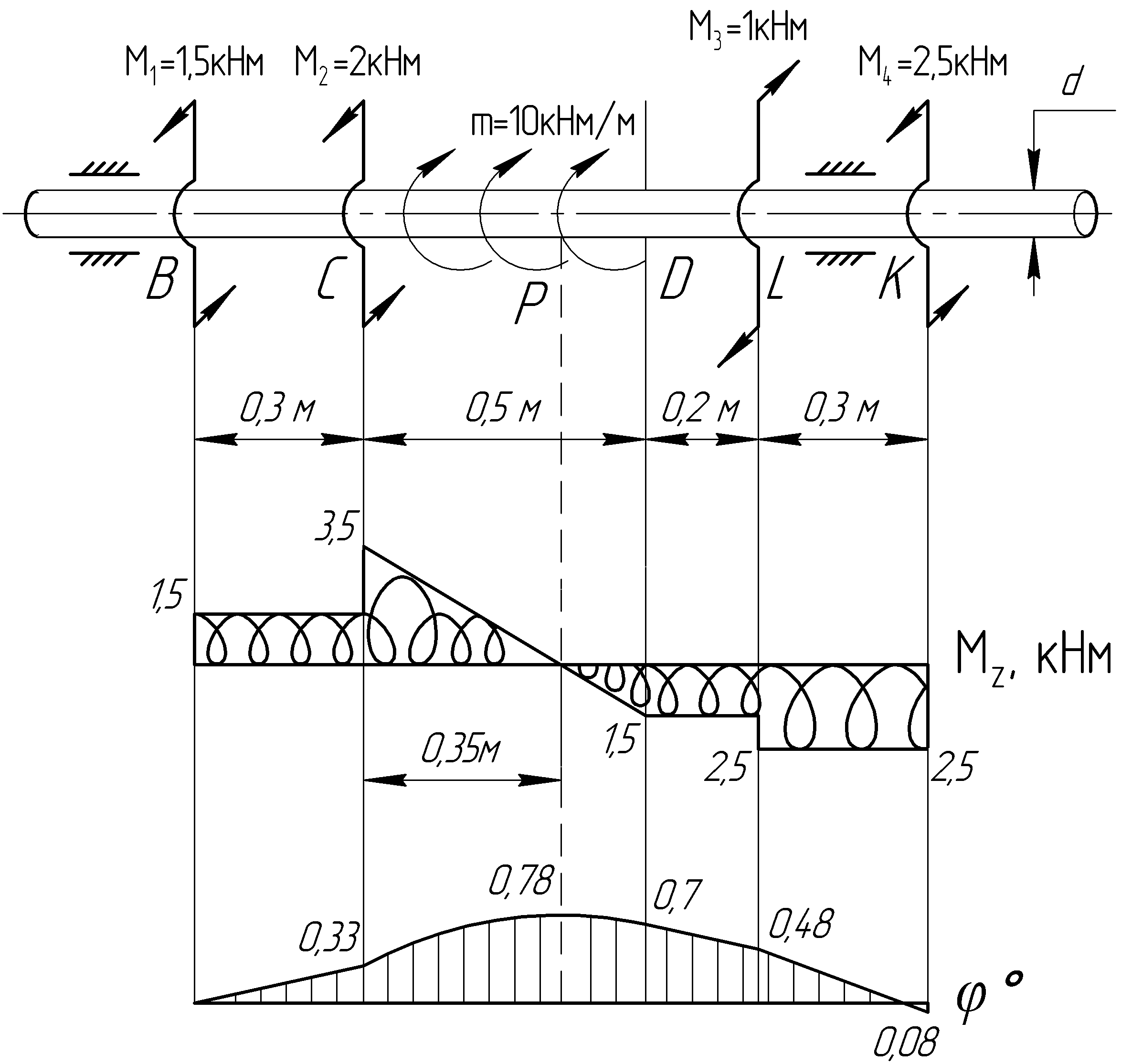
Пример решения задачи Задача Вал круглого поперечного сечения, заключенный в подшипники, нагружен системой внешних крутящих моментов. Определить из условия прочности величину допускаемого диаметра сечения Принять:
РЕШЕНИЕ 1. Построим эпюру крутящих моментов, используя метод сечений.
2. Определим положение опасного сечения вала и величину максимального касательного напряжения. Т.к. диаметр вала по всей его длине не меняется, то опасное сечение определяется непосредственно по эпюре крутящего момента Mz (там, где момент принимает максимальное по абсолютной величине значение). Таким образом, сечение C нашего вала наиболее опасно. Максимальное значение касательного напряжения в этом сечении равно:
3. Подставим полученное значение максимального напряжения в условие прочности и найдем минимально допустимый диаметр [d]:
4. Рассчитаем абсолютные углы закручивания участков стержня, приняв начало координат на крайней левой границе вала (сечение В). На участках с постоянным значением крутящего момента по длине функция углов закручивания
На участке CD крутящий момент изменяется по линейному закону, а функция
Так как эпюра Mz на участке CD в сечении P пересекает осевую линию (
5. Определим углы закручивания характерных сечений C, D, L, K и экстремального сечения P относительно неподвижного сечения B и построим эпюру углов закручивания
По эпюре видно, что максимальный по абсолютной величине угол закручивания возникает в сечении P: 6. Проверим выполнение условия жесткости по абсолютным углам закручивания:
т.е. условие жесткости не выполняется. 7. Проверим выполнение условия жесткости по относительным углам закручивания: Вычислим погонные углы закручивания для каждого участка по формуле
На участках без распределенного момента:
На участке с распределенным моментом парабола функции
Таким образом:
следовательно, условие жесткости не выполняется. Задача решена.
4.2.3. Задача для самостоятельного решения на занятии Для данного консольного вала определить из условия прочности величину допускаемого диаметра сечения [d], предварительно построив эпюры Мz и t. Для полученных размеров сечения определить максимальный абсолютный угол закручивания вала, построив эпюру углов закручивания j. Принять:
4.2.4. · Пройти тестовый тренинг (Приложение 2, тесты к ПЗ №11, стр.246)
ПРИЛОЖЕНИЯ Приложение 1. Определение реакций опор статически определимых балок Цель занятия: Научиться определять реактивные усилия, возникающие в опорных точках статически определимых нагруженных балок. Необходимые знания для достижения цели: 1. Основные виды опор на балках и возникающие в них реактивные усилия. 2. Понятие статической определимости. 3. Формы статических уравнений равновесия для плоской системы сил. 4. Правила определения момента относительно заданной точки от действия всех видов усилий, приложенных к балке. Теоретический материал Чаще всего для балок используются следующие виды опор: – жесткое защемление (жесткая заделка), – шарнирно-неподвижная опора, – шарнирно-подвижная опора. а) балка с жестким защемлением: В жестком защемлении (А) балки под действием произвольно направленной внешней нагрузки (силы F1 и F2) в плоской системе координат возникают три реактивных усилия: две проекции реактивной силы RAx и RAy и реактивный момент MA: Но если внешние силы будут направлены строго вертикально (параллельно друг другу), то горизонтальная проекция реактивной силы RAx будет тождественно равна нулю. Таким образом, при вертикальной нагрузке в жестком защемлении балки возникает два реактивных усилия – вертикальная реактивная сила RA и реактивный момент MA: б) балка на двух шарнирных опорах: Рассмотрим балку на двух шарнирных опорах, одна из которых шарнирно-неподвижная (опора А), а другая – шарнирно-подвижная (опора В). Внешняя нагрузка – плоская, произвольно направленная. Наличие шарнира в таких опорах снимает поворотное усилие, поэтому в них реактивных моментов не возникает. В шарнирно-неподвижной опоре (А) в силу её неподвижности возникает две проекции реактивной силы по направлению координатных осей RAx и RAy. В шарнирно-подвижной опоре (В) возможность её смещения в горизонтальном направлении компенсирует действие горизонтальных составляющих внешних сил и поэтому возникает единственная реактивная сила в вертикальном направлении RB (перпендикулярно направлению смещения опоры): Если же внешние силы будут направлены строго вертикально, то в шарнирно-неподвижной опоре (А) горизонтальная проекция реактивной силы RAx будет тождественно равна нулю. То есть, при вертикальной нагрузке и в шарнирно-неподвижной и в шарнирно-подвижной опорах возникают только по одной вертикальной реактивной силе – RA и RB: Конструкции, у которых количество неизвестных реактивных усилий равно необходимому и достаточному количеству уравнений статического равновесия, называются статически определимыми. А раз количество неизвестных соответствует количеству уравнений, в которые эти неизвестные входят, то все реактивные усилия однозначно определяются из уравнений статического равновесия. Отсюда и название таких конструкций – статически определимые. К статически определимым балкам относятся балки с жестким защемлением и балки на двух шарнирных опорах, одна из которых шарнирно-неподвижная, а другая – шарнирно-подвижная. Все нагруженные конструкции должны находиться в равновесии. Условием равновесия статически нагруженных плоских конструкций является выполнение для них трех статических уравнений равновесия. Три статических уравнения равновесия для конструкции, находящейся под действием произвольной плоской системы сил, могут быть записаны в одной из трех форм:
где:
где:
где: Если же силы, действующие на конструкцию, образуют параллельную систему сил (например, все силы направлены строго вертикально), то количество уравнений равновесия сокращается до двух, и они могут быть записаны в одной из двух форм:
здесь смысл уравнений тот же, причем ось Y, на которую проектируются все силы, должна быть параллельна силам. Рекомендация: эту форму уравнений равновесия рекомендуется выбирать для определения двух реакций опор балки с жестким защемлением и вертикальной нагрузкой, причем в качестве точки A рационально выбирать точку защемления балки:
здесь два моментных уравнения равновесия записываются относительно двух произвольных точек A и B, однако прямая АВ не должна быть параллельна силам. Рекомендация: эту форму уравнений равновесия рекомендуется выбирать для определения двух реакций опор балки с шарнирными опорами и вертикальной нагрузкой, причем в качестве точек A и B рационально выбирать опорные точки балки: Наибольшее затруднение у студентов вызывает составление моментных уравнений равновесия. Для этого нужно уметь определять значения моментов, возникающих в данной точке (относительно которой записывается уравнение равновесия) от действия каждого усилия (активного и реактивного), приложенного к конструкции. Основные виды усилий, применяемых в расчетных схемах: – сосредоточенный момент М, – сосредоточенная сила F, – распределенная сила интенсивностью q, приложенная на расстоянии а. Повторим правила определения момента в точке от действия М, F и q. Момент – это поворотное усилие, которое характеризуется значением и направлением вращения. Правило №1. Момент, возникающий в точке O плоской системы от действия сосредоточенного момента М, приложенного в точке A данной системы, равен значению данного момента М и сохраняет его направление вращения:
Таким образом, действие сосредоточенного момента передается в любую точку плоскости без изменения. Правило №2. Момент, возникающий в точке O плоской системы от действия сосредоточенной силы F, приложенной в точке A данной системы, равен произведению силы на её плечо (с учетом направления вращения).
Плечом силы F относительно точки О ( Правило №3. Момент, возникающий в точке O плоской системы от действия распределенной нагрузки интенсивностью q, приложенной на расстоянии а, равен произведению равнодействующей распределенной нагрузки на её плечо (с учетом направления вращения).
Равнодействующая распределенной нагрузки Q – это сосредоточенная сила, приложенная в центре тяжести распределенной нагрузки и равная произведению интенсивности q на расстояние действия а: Таким образом, чтобы составить моментное уравнение равновесия для балки относительно выбранной точки нужно определить моменты от всех действующих на балку усилий (активных и реактивных) относительно данной точки, просуммировать их с учетом направления вращения и приравнять полученную сумму к нулю. Алгоритм определения реакций опор статически определимых балок 1. Обозначить на схеме балки опорные точки буквами и изобразить в них реактивные усилия соответственно типам опор и виду внешней нагрузки. 2. Выбрать рациональную форму уравнений равновесия согласно приведенным выше рекомендациям. 3. По выбранной форме составить уравнения равновесия балки с учетом действия всех активных (заданных) и реактивных усилий. Внимание: количество уравнений должно соответствовать количеству реактивных усилий 4. Решить полученную систему уравнений равновесия относительно реактивных усилий. Внимание: если знак найденного реактивного усилия получился отрицательным, то его направление нужно изменить на противоположное 2. Задача Определить реакции опор данной балки: РЕШЕНИЕ 1. Обозначим опорные точки балки буквами A и B и изобразим в них реактивные усилия, возникающие от действия приложенной нагрузки: Так как все внешние силы, действующие на балку вертикальные (образуют параллельную систему сил), то и в шарнирно-неподвижной опоре A и в шарнирно-подвижной опоре B возникают только вертикальные реактивные силы RA и RB. 2. Наиболее рациональной формой двух уравнений равновесия для данной балки с вертикальной нагрузкой является вторая форма:
3. Составим первое моментное уравнение равновесия для нашей балки относительно опорной точки A: По часовой стрелке относительно точки A поворачивают балку распределенные силы q1 и q2: Найдем моменты этих сил относительно точки A, применяя правило №3 (см. выше):
Против часовой стрелки относительно точки A поворачивают балку следующие усилия: сосредоточенный момент М, реактивная сила RB и сосредоточенная сила F. Найдем моменты этих усилий относительно точки A, применяя правила №1 и №2 (см. выше):
Реакция RA относительно точки A момента не создает, потому что её линия действия проходит через эту точку и, соответственно, плечо её относительно точки A равно нулю: Приравняем сумму моментов, поворачивающих балку относительно точки A по часовой стрелке, к сумме моментов, поворачивающих её относительно этой точки против часовой стрелки:
Подставив сюда найденные значения данных моментов, приходим к уравнению относительно неизвестной реакции RB:
Выразим из этого уравнения реакцию RB и найдем её численное значение, подставив известные значения внешних усилий и параметра а:
Значение реакции RB получилось положительное, значит, мы угадали истинное её направление. Если знак реактивного усилия получается отрицательным, то его первоначально выбранное направление нужно изменить на противоположное. 4. Поступая аналогично, составим второе моментное уравнение равновесия: Мысленно открепив балку теперь от опоры A, получим рычаг с центром в точке B: По часовой стрелке относительно точки B поворачивают балку следующие усилия: распределенная нагрузка q1, сосредоточенная сила F и реактивная сила RA. Найдем моменты этих сил относительно точки B, применяя правила №2 и №3 (см. выше):
Против часовой стрелки относительно точки B поворачивают балку следующие усилия: распределенная нагрузка q2 и сосредоточенный момент М. Найдем моменты этих усилий относительно точки B, применяя правила №1 и №3 (см. выше):
Реакция RВ относительно точки B момента не создает, потому что её линия действия проходит через точку B и, соответственно, плечо её относительно точки B равно нулю: Приравняем сумму моментов, поворачивающих балку относительно точки B по часовой стрелке, к сумме моментов, поворачивающих её относительно этой точки против часовой стрелки:
Подставив сюда найденные значения данных моментов, приходим к уравнению относительно неизвестной реакции RA:
Выразим из этого уравнения реакцию RA и найдем её численное значение, подставив известные значения внешних усилий и параметра а:
Значение реакции RА также получилось положительное, значит, мы угадали и её истинное направление. 5. Проверим правильность найденных значений реактивных усилий силовым уравнением равновесия в проекции на вертикальную ось Y:
Подставим значения сил в уравнение:
Уравнение тождественно выполняется, значит, реакции найдены верно.
Таким образом, реактивные силы нашей балки направлены вверх и равны, соответственно:
Задача решена Приложение 2. Тестовый материал |
Последнее изменение этой страницы: 2017-03-15; Просмотров: 354; Нарушение авторского права страницы
 Что такое условие прочности по допускаемому напряжению?
Что такое условие прочности по допускаемому напряжению?  ,
,  .
. ,
,  для пластичного материала или
для пластичного материала или  для хрупкого материала, где τ T – предел текучести, τ В – предел прочности данной марки материала; nT – коэффициент запаса по текучести, nВ – коэффициент запаса по прочности.
для хрупкого материала, где τ T – предел текучести, τ В – предел прочности данной марки материала; nT – коэффициент запаса по текучести, nВ – коэффициент запаса по прочности.

 (угол закручивания граничных сечений данного участка относительно друг друга) с учетом знака крутящего момента:
(угол закручивания граничных сечений данного участка относительно друг друга) с учетом знака крутящего момента:  ,
,  – величина крутящего момента данного участка, l – длина участка, G – модуль сдвига (характеристика материала стержня),
– величина крутящего момента данного участка, l – длина участка, G – модуль сдвига (характеристика материала стержня),  – полярный момент инерции круглого сечения;
– полярный момент инерции круглого сечения; 
 .
. , откладывая на базе, параллельной продольной оси стержня, величины углов закручивания в соответствующих сечениях стержня (учитывать, что на участках без распределенного момента функция
, откладывая на базе, параллельной продольной оси стержня, величины углов закручивания в соответствующих сечениях стержня (учитывать, что на участках без распределенного момента функция  изменяется по линейному закону, а на участках с распределенным моментом – по параболическому).
изменяется по линейному закону, а на участках с распределенным моментом – по параболическому). .
. ,
,  – величина максимального угла закручивания сечений вала,
– величина максимального угла закручивания сечений вала,  – допускаемый угол закручивания, обычно назначаемый из условий эксплуатации или регламентирующими документами.
– допускаемый угол закручивания, обычно назначаемый из условий эксплуатации или регламентирующими документами. ,
,  max – величина максимального погонного угла закручивания участков стержня, [
max – величина максимального погонного угла закручивания участков стержня, [  ] – допускаемый погонный угол закручивания.
] – допускаемый погонный угол закручивания. согласно приведенному выше алгоритму.
согласно приведенному выше алгоритму. .
. , подставить в условие жесткости:
, подставить в условие жесткости:  , предварительно построив эпюру крутящего момента
, предварительно построив эпюру крутящего момента  . Проверить выполнение условия жесткости по абсолютным и относительным углам закручивания.
. Проверить выполнение условия жесткости по абсолютным и относительным углам закручивания. =100 МПа, G=
=100 МПа, G=  МПа,
МПа,  ,
,  .
.

 .
.

 .
. изменяется по линейному закону и здесь для определения абсолютного угла закручивания можно использовать формулу:
изменяется по линейному закону и здесь для определения абсолютного угла закручивания можно использовать формулу:  , т.е. на участках BC, DL и LK:
, т.е. на участках BC, DL и LK: 
 ;
; 
 ,
, 

 по параболическому, и абсолютный угол закручивания определяется по интегральной формуле:
по параболическому, и абсолютный угол закручивания определяется по интегральной формуле:  , т.е.
, т.е.

 ), то парабола функции
), то парабола функции 

 на базе, параллельной продольной оси стержня:
на базе, параллельной продольной оси стержня:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
 .
. .
. >
>  ,
,  .
.


 >
> 
 МПа, G=
МПа, G=  МПа.
МПа.
 Потренируемся?
Потренируемся?  ,
,  ,
,  ,
,
 – моментное уравнение равновесия, записанное относительно произвольной точки A, означающее, что сумма моментов, возникающих относительно точки A от действия всех активных (внешних) и реактивных сил конструкции должна равняться нулю;
– моментное уравнение равновесия, записанное относительно произвольной точки A, означающее, что сумма моментов, возникающих относительно точки A от действия всех активных (внешних) и реактивных сил конструкции должна равняться нулю;  и
и  – силовые уравнения равновесия, означающие, что сумма проекций всех активных и реактивных сил конструкции на координатные оси X и Y, соответственно, должна равняться нулю. Рекомендация: эту форму уравнений равновесия рекомендуется выбирать для определения трех реакций опор балки с жестким защемлением, причем в качестве точки A рационально выбирать точку защемления балки:
– силовые уравнения равновесия, означающие, что сумма проекций всех активных и реактивных сил конструкции на координатные оси X и Y, соответственно, должна равняться нулю. Рекомендация: эту форму уравнений равновесия рекомендуется выбирать для определения трех реакций опор балки с жестким защемлением, причем в качестве точки A рационально выбирать точку защемления балки:  ,
,  ,
,  ,
,
 и
и  – моментные уравнения равновесия, записанные относительно двух произвольных точек А и В, а
– моментные уравнения равновесия, записанные относительно двух произвольных точек А и В, а  – силовое уравнение равновесия в проекции на произвольную ось U, не перпендикулярную прямой, соединяющей точки А и В. Рекомендация: эту форму уравнений равновесия рекомендуется выбирать для определения реактивных усилий балки на двух шарнирных опорах, причем в качестве точек А и В рационально выбирать опорные точки балки, а силовое уравнение равновесия записывать в проекции на горизонтальную ось Х:
– силовое уравнение равновесия в проекции на произвольную ось U, не перпендикулярную прямой, соединяющей точки А и В. Рекомендация: эту форму уравнений равновесия рекомендуется выбирать для определения реактивных усилий балки на двух шарнирных опорах, причем в качестве точек А и В рационально выбирать опорные точки балки, а силовое уравнение равновесия записывать в проекции на горизонтальную ось Х:  ,
,  ,
,  ,
,
 ,
,  ,
,  – моментные уравнения равновесия, записанные относительно трех произвольных точек A, B и C, не лежащих на одной прямой.
– моментные уравнения равновесия, записанные относительно трех произвольных точек A, B и C, не лежащих на одной прямой. ,
,  ,
,
 ,
,  ,
,
 (по часовой стрелке).
(по часовой стрелке). (по часовой стрелке)
(по часовой стрелке) ) называется кратчайшее расстояние от точки O до линии действия силы.
) называется кратчайшее расстояние от точки O до линии действия силы. (по часовой стрелке)
(по часовой стрелке) . Плечом равнодействующей Q относительно точки О (
. Плечом равнодействующей Q относительно точки О (  ) называется кратчайшее расстояние от точки O до линии действия равнодействующей.
) называется кратчайшее расстояние от точки O до линии действия равнодействующей. !
!  Пример определения реактивных усилий балки на двух шарнирных опорах с вертикальной нагрузкой
Пример определения реактивных усилий балки на двух шарнирных опорах с вертикальной нагрузкой  ,
, 
 . Это уравнение означает, что алгебраическая сумма моментов, возникающих в точке A от действия всех активных (заданных) и реактивных усилий, должна равняться нулю. Это утверждение можно перефразировать несколько иначе: сумма моментов, поворачивающих балку относительно точки A по часовой стрелке, должна равняться сумме моментов, поворачивающих её относительно этой точки против часовой стрелки. Визуально это легко представить, если мысленно открепить балку от опоры B, тогда она будет представлять собой рычаг с центром в точке A, который поворачивается действующими усилиями либо против либо по часовой стрелке.
. Это уравнение означает, что алгебраическая сумма моментов, возникающих в точке A от действия всех активных (заданных) и реактивных усилий, должна равняться нулю. Это утверждение можно перефразировать несколько иначе: сумма моментов, поворачивающих балку относительно точки A по часовой стрелке, должна равняться сумме моментов, поворачивающих её относительно этой точки против часовой стрелки. Визуально это легко представить, если мысленно открепить балку от опоры B, тогда она будет представлять собой рычаг с центром в точке A, который поворачивается действующими усилиями либо против либо по часовой стрелке.

 ,
,  ,
,  .
.


 , и найдем из него вторую реактивную силу RA.
, и найдем из него вторую реактивную силу RA.







 . Если реакции найдены верно, то уравнение должно удовлетворяться тождественно. То есть, алгебраическая сумма всех активных и реактивных сил, действующих на балку, должна равняться нулю. Распределенная нагрузка в силовом уравнении равновесия представляется своей равнодействующей. В нашем случае:
. Если реакции найдены верно, то уравнение должно удовлетворяться тождественно. То есть, алгебраическая сумма всех активных и реактивных сил, действующих на балку, должна равняться нулю. Распределенная нагрузка в силовом уравнении равновесия представляется своей равнодействующей. В нашем случае:  и
и  . Силы, направленные вверх: RA, F и RB. Силы, направленные вниз: Q1 и Q2. Момент в силовом уравнении не участвует. Тогда силовое уравнение равновесия для нашей балки имеет вид:
. Силы, направленные вверх: RA, F и RB. Силы, направленные вниз: Q1 и Q2. Момент в силовом уравнении не участвует. Тогда силовое уравнение равновесия для нашей балки имеет вид: 

 ,
,  .
.