
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Классификация методов измерения уровня сыпучих материалов
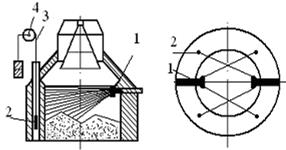
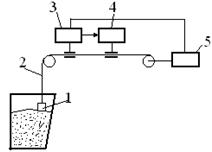
По своему назначению уровнемеры делятся на две группы: - уровнемеры, измеряющие абсолютное значение уровня по отношению к принятому за нулевой (такие уровнемеры имеют одностороннюю шкалу); - уровнемеры, измеряющие отклонение уровня от номинального (они имеют двустороннюю шкалу, как правило, симметричную). Приборы, применяемые для контроля уровня сыпучих материалов можно классифицировать по следующим признакам: - по характеру работы (контактные, бесконтактные); - по исполнению (общепромышленные, взрывобезопасные и др.); - по виду выполняемых функций: реле или сигнализатор уровня (регуляторы, уровнемеры); - по принципу работы; - по способу контроля (порционные, дискретные и непрерывные). По принципу действия уровнемеры для сыпучих материалов можно представить в виде шести групп методов: - использующих различие плотностей (весовой, радиоизотопный, гидростатический, буйковый, поплавковый.) - акустические (локационный, диссипативный, резонансный.) - тепловые (дилатометрический, терморезисторный, термо э.д.с.) - оптические (фотоэлектрический, визуальный, преломления, поглощения, отражения.) - электромагнитные (кондуктометрический, индуктивный, емкостной, радиоволновый.) - -механические (с гибким щупом, зондовый, маятниковый, с вращающимся телом, с колеблющимся телом.) 1) Методы, основанные на различиях плотностей Весовые (массовые) уровнемеры Простейшими из них по принципу работы являются весовые (массовые), основанные на взвешивании бункера вместе с имеющимся в нем материалом. В качестве преобразователя в этих уровнемерах может быть использована гидравлическая мессдоза, которая является опорой одной из лап бункера. Мессдоза представляет собой стальной корпус, герметично закрытый мембраной с закрепленным на ней поршнем, на который опирается лапа бункера. Внутренняя полость корпуса (под мембраной) заполнена жидкостью и соединительной линией соединяется с манометром, влияние жидкости в системе мессдоза — манометр равно силе тяжести бункера с материалом, деленной на площадь поршня. В массовых уровнемерах вместо мессдозы применяться и более совершенные магнитоупругие преобразователи, обеспечивающие высокую точность измерения (их погрешность не более ±5 %). Основным элементом таких преобразователей является металлический чувствительный элемент, магнитная проницаемость которого изменяется при упругой механической деформации. Магнитоупругие преобразователи устанавливаются под опоры бункера и включаются в схему неуравновешенного моста, выходной сигнал которого будет зависеть от степени деформации преобразователя, т. е. от количества материала в бункере. Радиоизотопные уровнемеры Радиоизотопные уровнемеры предназначены для непрерывного бесконтактного дистанционного измерения уровней жидкостей и сыпучих тел. Принцип действия этих приборов основан на изменении степени ослабления γ -излучения на границе раздела двух сред, испускаемого радиоактивными изотопами цезием Cs137 или кобальтом Со60 через контролируемую среду. Сигнал от счетчика через измерительные блоки воздействует на исполнительный механизм, который перемещает детектор вверх до положения, соответствующего уровню материала и регистрируемого вторичным прибором. Схема радиоизотопного уровнемера приведена на рис.1.
Рис.1. Радиоизотопный уровнемер: 1 – источник радиационного излучения; 2 – приёмник (детектор) излучения; 3 – кабель-тросы; 4 – токосъёмники 2)Акустические методы В уровнемерах, называемых акустическими, используется метод локаций уровня сыпучего материала через газовую среду. Достоинством этого метода является то, что акустическая энергия, посланная в объект для измерения уровня сыпучего материала, распространяется по газовой среде. Это обеспечивает универсальность измерения уровня сыпучего материала. Распространение по газовой среде обеспечивает универсальность по отношению к различным материалам, уровень которых необходимо измерить, а также высокую надежность первичных преобразователей, не контактирующих с сыпучими материалами. По принципу действия акустические уровнемеры можно подразделить на локационные, поглощения и резонансные. Наибольшее распространение получили локационные уровнемеры. Локационные уровнемеры В локационных уровнемерах используется эффект отражения ультразвуковых колебаний от границы раздела сыпучий материал — газ. Положение уровня определяется по времени прохождения ультразвуковых колебаний от источника до приемника после отражения их от поверхности раздела. На рис.2 изображён локационный уровнемер. Уровнемеры диссипативные (поглощения) В уровнемерах поглощения положение уровня определяется по ослаблению интенсивности ультразвука при прохождении через слои сыпучего материала и газа. Уровнемеры резонансные В резонансных уровнемерах измерение уровня производится посредством измерения частоты собственных колебаний столба газа над уровнем сыпучих материалов, которая зависит от уровня сыпучих материалов.
Рис.2. Схема локационного уровнемера: 1 – излучатель; 2 – приемник электромагнитной энергии; 3 – схемы измерения интервала времени
3) Оптические методы
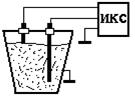
Визуальный уровнемер Визуальный метод основан на визуальном определении уровня сыпучих материалов. При повышенных давлениях применяются плоские стекла, на поверхности которых со стороны сыпучего материала нанесены вертикальные граненые канавки. Из условий прочности не рекомендуется применять указательные стекла длиной более 0, 5 м, поэтому при большом диапазоне изменения уровня устанавливается несколько стекол в шахматном порядке таким образом, чтобы их диапазоны измерения перекрывались. Уровнемеры преломления (отражения) Метод преломления (отражения) основан на изменении положения преломлённого (отражённого) луча при изменении уровня сыпучего материала. 4) Электромагнитные методы Для электропроводных материалов наиболее простыми являются кондуктометрические уровнемеры Кондуктометрический уровнемер Кондуктометрический уровнемер основан на измерении величины активного сопротивления между электродами при изменении уровня сыпучего материала. Сигнализатор может контролировать либо только верхний уровень сыпучего материала в бункере (в этом случае применяется только один электрод), либо верхний и нижний уровни (применяются два электрода). Примером может послужить уровнемер типа ИКС. Принцип действия таких сигнализаторов (рис.3) заключается в замыкании электрической цепи стенка бункера — материал — электрод при касании поверхностью материала электрода. Основные недостатки при эксплуатации: механическое разрушение электродов под действием материала, возможность ложных срабатываний из-за утечек через запыленную среду (обычно во избежание этого на электроды устанавливают охранные кольца).
Рис.3. Схема кондуктометрического уровнемера
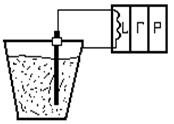
Индуктивный уровнемер Индуктивный метод основан на изменении индуктивности датчика, подключенного к генератору высокой частоты, при его погружении в контролируемую среду. Емкостной уровнемер Принцип действия основан на измерении электрической емкости первичного преобразователя, изменяющийся пропорционально изменению уровня контролируемого материала в резервуаре относительно неподвижного датчика. В таких устройствах емкостный преобразователь, образованный электродом 1 и стенкой бункера 2 (рис.4), совместно с катушкой индуктивности L образуют колебательный контур, резонансная частота которого определяется емкостью преобразователя, т.е. текущим значением уровня.
Рис.4. Схема ёмкостного уровнемера
Радиоволновый уровнемер Радиоволновый уровнемер основан на зависимости параметров колебаний электромагнитных волн от высоты уровня материала. Работа радиолокационных уровнемеров основывается на явлении отражения электромагнитных волн от границы раздела сред, различающихся электрическими и магнитными свойствами. В результате взаимодействия отражённого и излучённого сигнала изменяется частота сигнала. Частотный сигнал подаётся на вход вторичного преобразователя, где производится его обработка. 5) Механические методы Лотовый (зондовый) метод Специфическим уровнемером для сыпучих материалов является лотовый (зондовый) (рис.5). Зондовый метод, основанный на поддержании груза на границе раздела двух сред. Ч увствительным элементом таких уровнемеров является массивное тело (лот) 1, подвешенное на гибком тросе 2. В начале цикла измерений лот зафиксирован в предельном верхнем положении. Цикл измерения уровня начинается с момента растормаживания лота, при этом под действием собственного веса лот начинает опускаться. В этот же момент сигнальным устройством 3, реагирующим на натяжение троса, включается отсчетное устройство 4, регистрирующее смещение лота относительно первоначального предельного положения. В момент касания лотом поверхности, натяжение троса уменьшается, и сигнальное устройство 3 отключает отсчетное устройство, одновременно включая механизм подъема 5 лота, который поднимает лот в исходное положение, после чего цикл измерения повторяется. Показания от счетного устройства позволяют определить текущее значение уровня. Перед началом следующего цикла измерения показания отсчетного устройства должны быть сброшены.
Рис.5 Схема зондового уровнемера Метод с гибким щупом Уровнемеры с гибким щупом основаны на воздействии сыпучего материала на щуп, под воздействием сыпучего материала щуп упруго изгибается, поворачиваясь в месте шарнирного крепления, при этом элемент, находящийся в обойме касается контакта. Момент контакта фиксируется релейной схемой и свидетельствует о нахождении сыпучего материала в месте установки датчика. Принципиальная схема показана на рис.6. Уровнемер выполнен в виде гнезда 1 с вмонтированным под ним контактным датчиком 2, чувствительным элементом которого является щуп 3. уровнемер крепится к стенке бункера 4 с таким расчетом, чтобы гибкий щуп находился на уровне контролируемого материала. Если щуп не подвергается механическому воздействию сыпучего продукта, контакты, образованные щупом и трубкой, и находящиеся в корпусе датчика, разомкнуты. Под действием давления сыпучего материала щуп изгибается, замыкая контакты, и в цепь управления подается сигнал.
Рис.6 Схема уровнемера с гибким щупом.
Маятниковый метод Для контроля предельных уровней сыпучих материалов в емкостях находят применение маятниковые уровнемеры. При наличии угла естественного откоса прохождение уровня сыпучего материала приводит к повороту маятника вокруг оси подвески, при этом замыкаются контакты ртутного реле, вмонтированного в маятник. Для контроля верхнего уровня легкосыпучих материалов рекомендуется применение уровнемера маятникового типа, выполненное в виде конусообразного, снабженного ребрами корпуса. В точку контроля уровня корпус подвешивается с помощью гибкого кабеля, соединяющего со схемой управления находящийся внутри него ртутный контакт (рис. 7), обеспечивающий коммутацию нагрузки в цепях переменного тока напряжением до 127 В при токе 1А. А в цепях с напряжением 220 В — до 0, 2 А. При отключении продуктом корпуса замыкается ртутный контакт, выдавая сигнал в цепь контроля.
Рис.7. Схема маятникового реле
Метод с вращающимся телом Принцип действия следующий. Когда уровень контролируемого материала ниже тормозной крыльчатки, вал двигателя и, следовательно, вращающийся вал (крыльчатка) непрерывно вращаются, при достижении сыпучего материала крыльчатка останавливается. По замыканию или размыканию сигнальной цепи узнаем уровень сыпучих материалов. Метод колеблющегося тела Основан на изменении параметров электрической цепи, по которым регистрируется достижение уровнем сыпучего материала места установки датчика.
Описание установки
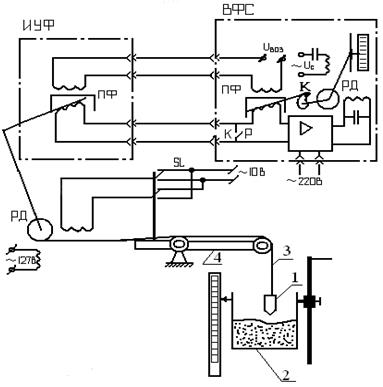
Уровнемеры с поступательным движением чувствительного элемента называют зондовыми. Схема лабораторной установки представлена на рис.8. Массивное тело I подвешено внутри сосуда с сыпучим материалом 2 на гибкой связи 3 (тросе или ленте). На валу реверсивного двигателя РД1 закреплен барабан, наматывающий трос с грузом. Включение двигателя выполнено таким образом, что при ослабленном тросе (груз касается сыпучего материала), двигатель наматывает трос и начинает поднимать груз. В момент натяжения троса через коромысло 4 срабатывают контакты S L и двигатель РД 1 ослабляет трос. В дальнейшем цикл повторяется. Таким образом, груз будет постоянно находиться на поверхности сыпучего материала. Двигатель РД1 связан кинематически с индикатором угла поворота ИУФ с ферродинамическим преобразователем, сигнал с которого поступает на вторичный самопишущий прибор ВФС. При рассогласованном положении рамок преобразователей на вход усилителя будет подаваться разность напряжений Δ U=U2-U1. Сигнал небаланса Δ U усиливается усилителем и приводит в действие реверсивный двигатель РД, выходной вал которого, кинематически соединенный с рамкой компенсирующего преобразователя и через профилирующий кулачок К со стрелкой, вращает рамку до тех пор, пока Δ U напряжение небаланса, уменьшаясь, не станет меньше порога чувствительности усилителя. При достижении полной компенсации ротор реверсивного двигателя остановится, а рамка преобразователя вторичного прибора и его стрелка займут положение, соответствующее углу поворота рамки преобразователя первичного прибора (ИУФ), а, следовательно, и значению измеряемой величины. Шкала прибора отградуирована в единицах измерения (мм).
Рис.8.Схема установки для измерения уровня сыпучего материала зондовым методом Порядок проведения работы
1. Ознакомиться по инструкции с принципом действия и устройством зондового следящего уровнемера. 2. Подать напряжение на установку. Переключателем " работа" установить его в положение " Вкл." 3. Включить прибор ВФС, для чего переключатель " питание" установить в положение " Вкл". Выдержать 3 мин. 4. Перемещая емкость с сыпучим материалом, записать показания прибора ВФС для разных уровней сыпучего материала. Результаты измерений свести в табл.1. Таблица 1 Результаты определения уровня сыпучих материалов
Абсолютная погрешность рассчитывается по формуле:
Приведенная погрешность рассчитывается по формуле:
где
5. По результатам таблицы построить график зависимости показаний прибора ВФС от перемещения емкости. 6. Составить отчет о проведенной работе. 7. Отчет должен содержать наименование работы, цель работы, схему установки и ее краткое описание, результаты работы в виде таблицы и графика, выводы. В выводах отразить точность и надежность метода.
5 Контрольные вопросы
1. Что такое слеживаемость, и каких видов она бывает? 2. Какими основными свойствами обладают сыпучие материалы? 3. Принцип действия уровнемеров, основанных на различии плотностей сыпучего материала. 4. Принцип действия акустических методов. 5. Принцип действия зондового метода, реализованного в лабораторной работе.
|
Последнее изменение этой страницы: 2017-03-14; Просмотров: 3127; Нарушение авторского права страницы
 . (25)
. (25) , (26)
, (26) - конечное показание уровня по шкале;
- конечное показание уровня по шкале;  - начальное показание уровня по шкале.
- начальное показание уровня по шкале.