
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинетический момент вращающегося твёрдого тела относительно оси вращения равен произведению угловой скорости на момент инерции относительно оси вращения.
Теорема об изменении момента количества движения материальной точки.
Проведём из произвольного центра О в точку М радиус-вектор r.
Чтобы установить зависимость между моментом силы
т.е.
Если на материальную точку действует несколько сил, то момент силы рассматриваем как момент равнодействующей, т.е.
Производная по времени от момента количества движения материальной точки относительно центра равна геометрической сумме моментов сил, действующих на точку, относительно центра. Проецируем векторное равенство на оси, получим:
Производная по времени от момента количества движения материальной точки относительно оси равна алгебраической сумме моментов сил действующих на точку относительно той же оси. Теорема об изменении кинетического момента механической системы. Механическая система состоит из n материальных точек. Запишем теорему об изменении количества движения для К -той точки относительно центра О. Таких уравнений может быть n. Просуммируем их:
Первая производная по времени от кинетического момента механической системы относительно центра равна геометрической сумме моментов всех внешних сил, действующих на систему относительно того же центра. Проецируем данное векторное уравнение на оси, получим:
Производная по времени от кинетического момента механической системы относительно оси равна алгебраической сумме моментов всех внешних сил, действующих на систему относительно той же оси.
Условие сохранения кинетического момента механической системы. 1. Если главный момент всех внешних сил, действующих на систему, относительно центра всё время остаётся равным нулю, то кинетический момент этой системы остаётся постоянным.
2. Если алгебраическая сумма моментов всех внешних сил, действующих на систему, относительно оси всё время остаётся равной нулю, то кинетический момент системы относительно той же оси величина постоянная.
Дифференциальное уравнение вращающегося твёрдого тела.
Работа силы.
1. Работа постоянной силы.
перемещается по прямой из М в М1, а вектор силы составляет с прямой угол a.
Работа силы в этом случае равна произведению модуля силы на длину пути, пройденного точкой приложения силы, на сos угла между направлением вектора силы и вектора перемещения точки её приложения:
a - острый, AF - +; a - тупой, AF -, т.е. работа +, когда сила ускоряет движение.
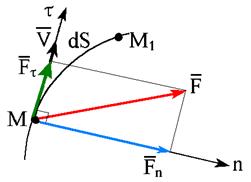
2. Элементарная работа. Теоремы о работе силы.
силы перемещается по криволинейно- му участку пути. Чтобы вычислить работу силы, необходимо разбить это перемещение на элементарные участ- ки пути, найти работу на каждом участ- ке, как работу постоянной силы и определить предел суммы элементарных работ при стремлении числа участков к ¥ , а длины каждого к 0.
Знак работы определяется знаком Разложим силу
так как Fn не совершает работы. В общем виде:
где
где:
Теорема 1.Работа равнодействующей силы на некотором перемещении равна алгебраической сумме работ составляющих сил на том же перемещении.
Теорема 2. Работа постоянной силы по модулю и направлению на результирующем перемещении равна алгебраической сумме работ этой силы на составляющих перемещениях.
На основании этой теоремы при вычислении работы постоянной силы на криволинейном перемещении криволинейное перемещение можно заменить прямолинейным. В случае замкнутого контура, т.е. когда u = 0, работа постоянной силы равна нулю.
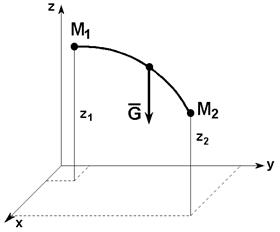
3. Работа силы тяжести.
Работа силы тяжести равна взятому со знаком + или - произведению силы тяжести на вертикальное перемещение точки её приложения.
z1 - z2 = H
Работа силы тяжести не зависит от вида траектории, по которой перемещается точка приложения, а зависит лишь от расстояния между горизонтальными плоскостями, проходящими через начальное и конечное положения точки.
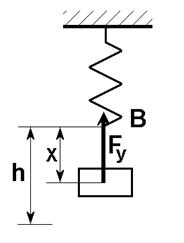
4. Работа силы упругости.
Fy – сила упругости, c – жесткость пружины, h – max. деформация, х – текущая координата Fy = - c . х
5. Работа силы, приложенной к твёрдому телу, вращающемуся вокруг неподвижной оси.
Запишем элементарную работу силы F на элементарном перемещении по дуге dS.
Выразим длину дуги dS через угол поворота dφ
Подставим значения в (1)
где R . cosα = h, тогда
Интегрируем
Работа силы равна произведению момента, который создаёт эта сила, на угол поворота тела.
Мощность силы.
Кинетическая энергия материальной точки и механической системы.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 636; Нарушение авторского права страницы
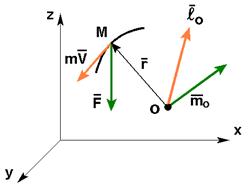 Точка М движется под действием силы F.
Точка М движется под действием силы F. 

 и моментом
и моментом  найдём производную по времени от
найдём производную по времени от 


 т.к.
т.к. 


 ;
; 
 ;
;  .
.







 , то
, то  , а
, а 
 , то
, то  , а
, а 



 Точка приложения постоянной силы
Точка приложения постоянной силы 
 – вектор перемещения.
– вектор перемещения.



 Предположим, что точка приложения
Предположим, что точка приложения

 и знаком
и знаком  .
. на составляющие
на составляющие  и
и 

 - вектор элементарного перемещения.
- вектор элементарного перемещения. 














 (1)
(1)

 , но
, но , отсюда
, отсюда


 Вт, кВт
Вт, кВт  - кинетическая энергия материальной точки равна половине
- кинетическая энергия материальной точки равна половине