|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Принцип возможных перемещений. ⇐ ПредыдущаяСтр 6 из 6
1. Обобщённые координаты и число степеней свободы.
При движении механической системы, все её точки не могут перемещаться произвольно, так как они ограничены связями. Это значит, что не все координаты точек независимы. Положение точек определяется заданием только независимых координат. Независимые величины, однозначно определяющие положение всех точек механической системы, называются обобщёнными координатами. Для голономных систем (т.е. таких, связи которых выражаются уравнениями, зависящими только от координат) число независимых обобщённых координат механической системы равно числу степеней свободы этой системы.
Примеры: 1.
кривошипа. Одна степень свободы.
2. Положение свободной точки в пространстве определяется тремя координатами, независимыми друг от друга. Поэтому три степени свободы. 3. Твёрдое вращающееся тело, положение определяется углом поворота j. Одна степень свободы. 4. Свободное твёрдое тело, движение которого определяется шестью уравнениями - шесть степеней свободы.
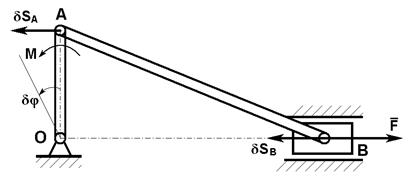
2. Возможные перемещения механической системы. Идеальные связи. Возможнымиперемещениями называются воображаемые бесконечно малые перемещения, допускаемые в данный момент наложенными на систему связями. Возможные перемещения точек механической системы рассматриваются как величины первого порядка малости, поэтому криволинейные перемещения точек заменяют прямолинейными отрезками, отложенными по касательной к траекториям движения точек и обозначаются dS.
dSA = dj . OA
Все силы, действующие на материальную точку, делятся на задаваемые и реакции связей. Если сумма работ реакций связей на любом возможном перемещении системы равна нулю, то такие связи называются идеальными.
3. Принцип возможных перемещений.
Для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на неё активных сил при любом возможном перемещении системы была равна нулю.
Значение принципа возможных перемещений:
1. Учитываются только активные силы. 2. Даёт в общей форме условие равновесия для любой механической системы, тогда, как в статике необходимо рассматривать равновесие каждого тела системы в отдельности.
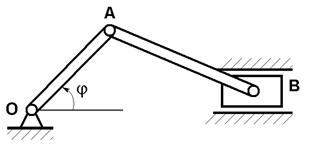
Задача.
Для заданного положения кривошипно-ползунного механизма при равновесии, найти зависимость между моментом и силой, если ОА = ℓ.
Общее уравнение динамики.
Принцип возможных перемещений даёт общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики для решения задач динамики. Следовательно, применяя эти два принципа одновременно, можно получить общий метод решения задач динамики. Рассмотрим механическую систему, на которую наложены идеальные связи. Если ко всем точкам системы, кроме действующих на них активных сил
Так как связи идеальные, то:
Тогда:
Это равенство представляет общее уравнение динамики.
Из него вытекает принцип Даламбера-Лагранжа– при движении системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю.
Задача.
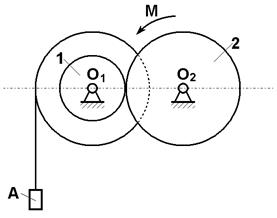
В подъёмнике к шестерне 2 веса 2G c радиусом R2=R приложен вращающий момент М=4GR. Определить ускорение поднимаемого груза А весом G, пренебрегая весом верёвки и трением в осях. Барабан, на который наматывается верёвка, и жёстко скреплённая с ним шестерня 1, имеют общий вес 4G и радиус инерции r = R. Радиус барабана RA = R и шестерни 1 R1=0, 5R.
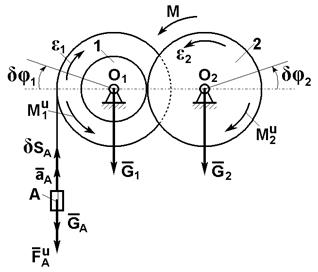
Изобразим все действующие силы, направление ускорений и возможные перемещения.
G2 = 2G R2 = R M = 4GR GA = G r = R RБ = R R1 = 0, 5R ________________
aA -?
Подставим в общее уравнение динамики
Подставим значения
δ φ 1≠ 0 Выразим все ускорения через искомое аА и приравняем выражение в скобках к нулю
Подставим значения
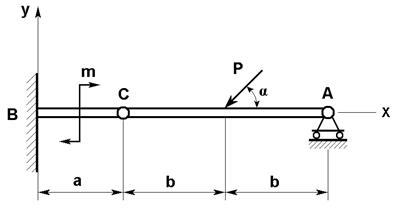
Принцип возможных перемещений.
b = 2а = 0, 3 м a = p¤4 рад Р = 40 Н m = 1, 2 Нм _________________
хВ; уВ; NA; Mp
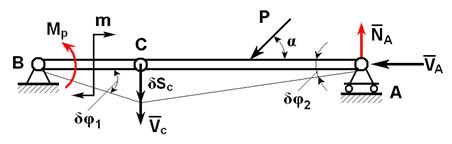
Решение: Найдём реакцию подвижной опоры А для чего мысленно отбросим эту связь, заменив её действие реакцией NA
Возможным перемещением стержня АС является его поворот вокруг шарнира С на угол dj. Стержень ВС остаётся неподвижным. Составим уравнение работ, учитывая, что работа сил при повороте тела равна произведению момента силы относительно центра вращения на угол поворота тела.
Для определения реакций жёсткого закрепления в опоре В сначала найдём момент реакции Мр. Для этого отбросим связь, препятствующую повороту стержня ВС, заменив жёсткое закрепление шарнирно-неподвижной опорой и приложив момент Мр.
Сообщим стержню возможный поворот на угол dj1. Составим уравнение работ для стержня ВС:
Определим перемещения:
Для определения вертикальной составляющей
Сообщим левой части (стержню ВС с ползуном В ) возможную скорость VB поступательного движения вниз. Стержень АС повернётся вокруг точки А. Составим уравнение работ:
Для определения горизонтальной составляющей
Сообщим левой части (ползуну В вместе со стержнем ВС ) возможную скорость VB поступательного движения влево. Так как опора А на катках, то и правая часть будет перемещаться поступательно с той же скоростью. Следовательно Составим уравнение работ для всей конструкции.
Для проверки правильности решения составим уравнения равновесия всей системы:
Условие выполнено.
Ответ: yB = -14, 2 H; XB = -28, 4 H; NA = 14, 2 H; VP =3, 33 Hм. Обобщённые скорости. Обобщённые силы.
Независимые величины, однозначно определяющие положение всех точек механической системы, называются обобщёнными координатами.– q Если система имеет S степеней свободы, то её положение будет определяться S обобщёнными координатами:
q1; q2; …; qs.
Поскольку обобщённые координаты между собой независимы, то элементарные приращения этих координат будут также независимы:
dq1; dq2; …; dqS.
При этом каждая из величин dq1; dq2; …; dqS определяет соответствующее, независимое от других возможное перемещение системы. При движении системы её обобщённые координаты будут с течением времени непрерывно изменяться, закон этого движения определяется уравнениями:
Это уравнения движения системы в обощённых координатах. Производные от обобщённых координат по времени называются обобщёнными скоростями системы:
Размерность зависит от размерности q. Рассмотрим механическую систему, состоящую из n материальных точек, на которые действуют силы F1, F2, Fn. Пусть система имеет S степеней свободы и её положение определяется обобщёнными координатами q1; q2; q3. Сообщим системе возможное перемещение, при котором координата q1 получает приращение dq1, а остальные координаты не изменяются. Тогда радиус-вектор к-той точки получает элементарное приращение (drk)1. Это приращение, которое получает радиус-вектор при изменении только координаты q1 на величину dq1. Остальные координаты остаются неизменными. Поэтому (drk)1 вычисляется как частный дифференциал:
Вычислим элементарную работу всех приложенных сил:
Вынесем за скобки dq1, получим:
где Итак, обобщённая сила – это коэффициент при приращениях обобщённой координаты. Вычисление обобщённых сил сводится к вычислению возможной элементарной работы. Если меняются все q, то:
Согласно принципа возможных перемещений, для равновесия системы необходимо и достаточно, чтобы SdАак = 0. В обобщённых координатах Q1.dq1 + Q2.dq2 + … + Qs.dqs = 0 следовательно, для равновесия системы необходимо и достаточно, чтобы обобщённые силы, соответствующие выбранным для системы возможным перемещениям, а значит и обобщённым координатам, были равны нулю. Q1 = 0; Q2 = 0; … Qs = 0.
Уравнения Лагранжа.
Используя общее уравнение динамики для механической системы, можно найти уравнения движения механической системы.
Если обобщённые силы инерции выразить через кинетическую энергию системы, то уравнения будут выглядеть следующим образом:
- дифференциальные уравнения движения механической системы в обобщённых координатах.
Для решения задач, то есть для составления уравнений Лагранжа необходимо: 1) установить число степеней свободы системы и выбрать обобщённые координаты; 2) изобразить систему в произвольном положении и показать действующие активные силы; 3) вычислить обобщённые силы; 4) определить кинетическую энергию системы, выразить эту энергию через обобщённые скорости и обобщённые координаты; 5) найти соответствующие частные производные от Т по
Теория удара.
Движение тела под действием обычных сил характеризуется непрерывным изменением модулей и направлений скоростей этого тела. Однако встречаются случаи, когда скорости точек тела, а следовательно и количество движения твёрдого тела за очень маленький промежуток времени получают конечные изменения.
Явление, при котором за ничтожно малый промежуток времени скорости точек тела изменяются на конечную величину, называется ударом.
Силы, при действии которых происходит удар, называются ударными.
Малый промежуток времени t , в течение которого происходит удар, называется временем удара.
Так как ударные силы очень велики и за время удара изменяются в значительных пределах, то в теории удара в качестве меры взаимодействия тел рассматривают не сами ударные силы, а их импульсы. Импульсы неударных сил за время t будут величинами очень малыми и ими можно пренебречь. Теорема об изменении количества движения точки при ударе:
где v – скорость точки в начале удара, u – скорость точки в конце удара.
Основное уравнение теории удара.
Перемещение точек за очень малый промежуток времени, то есть за время удара, будут также малы, а следовательно, будем считать тело неподвижным.
Итак, можно сделать следующие выводы о действии ударных сил:
1) действием неударных сил за время удара можно пренебречь; 2) перемещениями точек тела за время удара можно пренебречь и считать тело во время удара неподвижным; |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 2321; Нарушение авторского права страницы
 Положение всех точек однозначно определяется углом поворота
Положение всех точек однозначно определяется углом поворота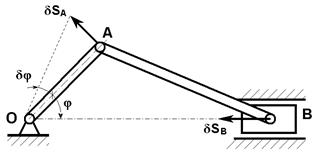





 и реакций связей
и реакций связей  , прибавить соответствующие силы инерции
, прибавить соответствующие силы инерции  , то согласно принципу Даламбера полученная система сил будет находиться в равновесии. Применяя принцип возможных перемещений, получим:
, то согласно принципу Даламбера полученная система сил будет находиться в равновесии. Применяя принцип возможных перемещений, получим: 





 Выразим перемещение через угол поворота δ φ 1
Выразим перемещение через угол поворота δ φ 1 








 а = 0, 15 м
а = 0, 15 м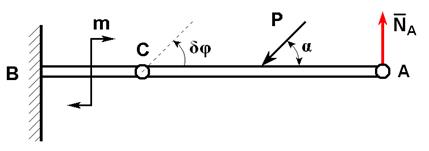




 реакции жёского закрепления отбросим связь, препятствующую вертикальному перемещению точки В, заменив жёсткое закрепление скользящей (невозможен поворот) и приложив реакцию
реакции жёского закрепления отбросим связь, препятствующую вертикальному перемещению точки В, заменив жёсткое закрепление скользящей (невозможен поворот) и приложив реакцию 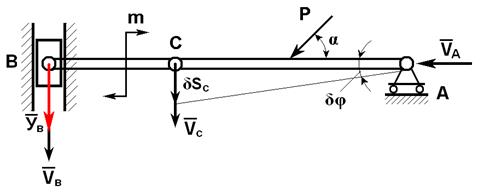



 реакции жёсткого закрепления отбросим связь, препятствующую горизонтальному перемещению точки В заменив жёсткую заделку скользящей и приложив реакцию
реакции жёсткого закрепления отбросим связь, препятствующую горизонтальному перемещению точки В заменив жёсткую заделку скользящей и приложив реакцию 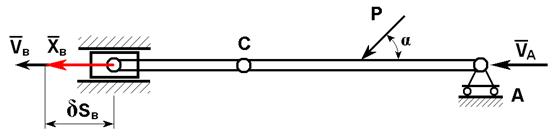
 .
.








 , ….,
, …., 
 - обобщённая сила.
- обобщённая сила. 



 }Уравнения Лагранжа-
}Уравнения Лагранжа- и
и  и подставить все значения в уравнение.
и подставить все значения в уравнение.