|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Материальных точек, входящих в эту систему.
Теорема об изменении кинетической энергии материальной точки.
Материальная точка М движется под действием системы сил
Дифференциальное уравнение движения
В проекции на ось τ Ускорение касательное
Подставим (3) в (2)
Умножим обе части равенства (4) на скорость V и разделим переменные
Интегрируем
где
Изменение кинетической энергии материальной точки на некотором перемещении равно сумме работ всех сил, действующих на материальную точку на том же перемещении.
Теорема об изменении кинетической энергии механической системы.
Кинетическая энергия твёрдого тела при поступательном движении.
Так как при поступательном движении скорости всех точек тела равны по величине, то:
Кинетическая энергия твёрдого тела, вращающегося вокруг оси.
Кинетическая энергия твёрдого тела при плоскопараллельном движении.
Задача 1.
и радиусом R = 0, 1 м начинает движение из состояния покоя под действием постоянной силы F = 10 H, приложенной к центру диска. Определить работу сил, действующих на диск, за время перемещения центра на рассто- яние S = 3 м, коэффициент трения качения диска по плоскости d(fк) = 0, 01 м. Сопротивление движению не учитывать.
Приложим все действующие силы.
Момент сил трения
Угол поворота диска при перемещении центра диска С на расстояние S = CC/
Запишем работу
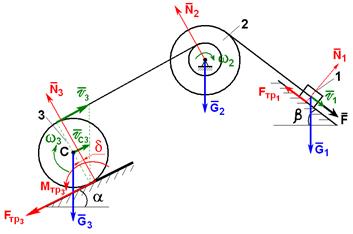
Задача 2. Система тел, состоящая из груза 1, ступенчатого шкива 2 и сплошного диска 3 приходит в движение под действием силы F из состояния покоя. Определить скорость груза 1 после того как он переместится на расстояние S.
m1 = m m2 = 2m m3 = 4m R2 = 0, 2 м r2 = 0, 5 R2 R3 = 0, 2 м a = 300; b = 600; f = 0, 2; d = 0, 02 м; F = 2mS.H; S = 1 м.
1. Рассмотрим движение механической системы, состоящей из тел 1, 2, 3, соединённых нерастяжимыми нитями. Изобразим все действующие на систему внешние силы: активные
Для определения V1 воспользуемся теоремой об изменении кинетической энергии системы
2. Определим кинетическую энергию Т0 и Т. Так как в начальный момент система находилась в покое, то V0 = 0 и Т0 = 0. Величина Т равна сумме энергий всех тел системы:
Т = Т1 + Т2 + Т3 (2) груз 1 движется поступательно
Шкив 2 вращается вокруг неподвижной оси
Диск 3 движется плоскопараллельно
Все входящие сюда скорости выразим через искомую V1
Определим моменты инерции тел 2 и 3
Подставим значения в кинетические энергии Т2 и Т3
Величину кинетической энергии найдём из (2)
3. Найдём сумму работ всех действующих внешних сил при том перемещении, когда груз 1 пройдёт путь S
Выразим все перемещения через S1 = S
Определим работу сил.
где
где
Найдём сумму работ системы
Определим скорость V1 по (1)
Принцип Германа(1716г.)-Эйлера(1737г.)-Даламбера(1743г.) для материальной точки.
системы сил F1, F2, …, Fn движется с ускорением а. Основное уравнение динамики имеет вид:
правую
Тогда:
Геометрическая сумма всех приложенных к точке сил и силы инерции этой точки равны нулю. Это принцип Даламбера для материальной точки. Благодаря простоте этот метод получил широкое применение во многих прикладных дисциплинах. В ряде случаев он обеспечивает наиболее простое и удобное решение задач динамики.
Задача. Шарик весом 10 кН подвешен на нити длиной ℓ =0, 5 м, закреплённой в неподвижной точке О. Шарику сообщается равномерное движение по окружности в горизонтальной плоскости, при котором нить составляет с вертикалью угол a =300. Определить натяжение нити и скорость шарика.
Принцип Даламбера для механической системы.
Рассмотрим несвободную механическую систему, состоящую из n материальных точек. Воспользовавшись принципом освобождаемости от связей, для каждой точки применим принцип Даламбера.
Сложим n уравнений:
В любой момент времени для всякой несвободной механической системы геометрическая сумма задаваемых сил, в том числе и реакций связей и сил инерции материальных точек системы равна нулю. Это принципДаламбера для механической системы. Из статики известно, что система сил может быть заменена одной силой – главным вектором и парой сил, момент которой равен главному моменту относительно центра. Для системы сил инерции - Условие равновесия:
Главный вектор силинерции тела, совершающего любое движение, равен произведению массы тела на ускорение его центра масс и направлен противоположно этому ускорению.
Рассмотрим несколько частных случаев движения тела. 1. Поступательное движение. В этом случае тело никакого вращения вокруг центра масс не имеет, поэтому При поступательном движении силы инерции твёрдого тела приводятся к одной равнодействующей, равной 2. Вращательное движение. Пусть ось вращения проходит через центр масс тела. Тогда ас = 0 и Ru = 0.
Тогда: При вращательном движении силы инерции приводятся к моменту
3. Плоскопараллельное движение.
При плоском движении тела силы инерции приводятся к равнодействующей равной Задача 1.
На барабан весом G1 и радиуса R намота- на нить с грузом весом G2 . Пренебрегая массой нити и трением в оси: 1) определить угловое ускорение барабана при вертикальном движении груза. Счи- тать барабан сплошным однородным те- лом; 2) найти натяжение нити.
1.
2. Рассмотрим груз:
Задача 2.
Однородный стержень АВ длиной ℓ и весом G прикреплён шарниром А к вертикальному валу, вращающему- ся с угловой скоростью w. Найти натяжение горизонтальной нити, удерживающей стержень под углом a к валу.
|
Последнее изменение этой страницы: 2017-03-17; Просмотров: 545; Нарушение авторского права страницы

 с ускорением
с ускорением  .
. (1)
(1) (2)
(2) (3)
(3) (4)
(4)
 - перемещение.
- перемещение.












 Однородный сплошной диск весом G = 10 H
Однородный сплошной диск весом G = 10 H 
 , где N = G
, где N = G 

 Дано:
Дано:  момент сил трения
момент сил трения  , реакции
, реакции  и силы трения
и силы трения  и
и  .
.
 (1)
(1)













 Дж
Дж
 дж
дж Дж
Дж

 т.к.
т.к.  - перпендикулярна перемещению
- перпендикулярна перемещению
 т.к. они приложены к неподвижной точке
т.к. они приложены к неподвижной точке т.к.
т.к.  перпендикулярна перемещению
перпендикулярна перемещению т.к.
т.к.  - приложена в МЦС
- приложена в МЦС Дж
Дж
 Дж
Дж

 Дж
Дж
 м/с
м/с Это общий метод, с помощью которого уравнениям динамики по форме придают вид уравнений статики.
Это общий метод, с помощью которого уравнениям динамики по форме придают вид уравнений статики. Предположим, что точка М под действием
Предположим, что точка М под действием
 Перенесём из левой части уравнения в
Перенесём из левой части уравнения в ,
, 

 сила инерции. Сила инерции равна по модулю ma и направлена противоположно вектору ускорения.
сила инерции. Сила инерции равна по модулю ma и направлена противоположно вектору ускорения.


















 включают
включают 
 - главный вектор сил инерции и Моu – главный момент сил инерции относительно центра.
- главный вектор сил инерции и Моu – главный момент сил инерции относительно центра.
 ;
; 
 а следовательно и
а следовательно и 
 и проходящей через центр масс тела.
и проходящей через центр масс тела. Но
Но 
 Обратите внимание на знак!
Обратите внимание на знак! 
 проходящей через центр масс и моменту Мсu.
проходящей через центр масс и моменту Мсu. 











 – проходит через центр тяжести D.
– проходит через центр тяжести D.