|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Вращательное движение твердого тела
Вращательное движение – это движение твердого тела, имеющего как минимум две неподвижные точки (рисунок 1.3). Прямая, проходящая через эти точки, называется осью вращения. Положение тела определено, если задан угол φ между плоскостями П0 и П, одна из которых неподвижна, а другая жестко связана с телом. φ =φ (t) – уравнение вращательного движения твердого тела.
Рис. 1.3
За положительное направление отсчета принимается вращение против хода часовой стрелки, если смотреть навстречу положительному направлению оси z. Траекториями точек тела при его вращении вокруг неподвижной оси являются окружности, расположенные в плоскостях, перпендикулярных оси вращения. Для характеристики изменения угла поворота с течением времени вводится величина, называемая угловой скоростью ω :
В технике угловая скорость – это частота вращения, выраженная в оборотах в минуту. За одну минуту тело повернется на угол 2π ⋅ n, где n – число оборотов в минуту (об/мин). Разделив этот угол на число секунд в минуте, получим
Вектор угловой скорости – это вектор, направленный по оси вращения в ту сторону, откуда вращение видно происходящим против хода часовой стрелки, с модулем, равным модулю алгебраической угловой скорости
где k – единичный вектор оси вращения. Угловое ускорение – мера изменения угловой скорости:
Вектор углового ускорения – производная вектора угловой скорости по времени (рис. 1.4)
Рис. 1.4
Если ε > 0 и ω > 0 (рисунок 1.4), то угловая скорость возрастает с течением времени и, следовательно, тело вращается ускоренно в рассматриваемый момент времени в положительную сторону. Направление векторов ω и ε совпадают, оба они направлены в положительную сторону оси вращения Oz. При ε < 0 и ω < 0 – тело вращается ускоренно в отрицательную сторону. Направление векторов ω и ε совпадают, оба они направлены в отрицательную сторону оси вращения Oz. Если ε < 0 и ω > 0, то имеем замедленное вращение в положительную сторону. Векторы ω и ε направлены в противоположные стороны. Если ε > 0 при ω < 0, то имеем замедленное вращение в отрицательную сторону. Векторы ω и ε направлены в противоположные стороны. Если угловая скорость ω =const, то вращательное движение называется равномерным. Уравнение равномерного вращения φ =φ 0 +ω t Если угловое ускорение ε =const, то вращательное движение называется равнопеременным. Уравнение равнопеременного вращения
и уравнение, выражающее угловую скорость в любой момент времени ω =ω 0 +ε t представляют совокупность основных формул вращательного равнопеременного движения тела. Передаточный механизм Передаточные механизмы передают движение от одного тела к другому. Параметры движения тел определяются с учетом параметров точек соприкосновения (зацепления) этих тел. На рисунке 2.6 (а, б, в, г) приведены различные схемы передачи движения от одного тела к другому.
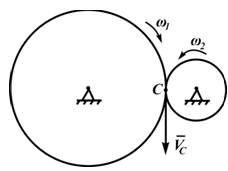
На рисунках 2.6, а и 2.6, б зависимости угловых скоростей колес определяются из соотношения Vc=ω 1⋅ r1=ω 2⋅ r2, т.е.
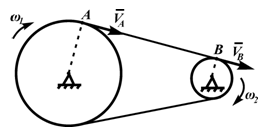
ω 1/ω 2=r2/r1 (2.12) На рисунке 2.6, а (внешнее зацепление) колёса вращаются в противоположные стороны, на рисунке 2.6, б (внутреннее зацепление) колеса вращаются в одну сторону. На рисунке 2.6, в показана цепная (ременная) передача. Скорости точек A и B цепи должны быть равны соответственно скоростям точек A и B , принадлежащих шкивам:
VA=ω 1⋅ r1=VB=ω 2⋅ r2, ω 1/ω 2=r2/r1.
а б
в г Рисунок 2.6
На рисунке 2.6, г поступательное движение стержня обеспечивает вращение колеса: VA=VC=ω ⋅ r, ω =VA/r
Рисунок 2.7
На рисунке 2.7 изображена фрикционная передача: колесо 1, прижимаясь к торцу колеса 2 в точке C, обеспечивает его вращение вокруг вертикальной оси.
VC=ω 1⋅ r1=ω 2⋅ d, ω 1/ω 2=d/r1 Передаточное число колес Передаточные механизмы (рисунок 1.8) предназначены для передачи вращения от одного вала (ведущего – 1) к другому (ведомому – 2). Вращательная скорость ν C в точке соприкасания колес C относится к точкам обоих колес, по модулю ν C = r1ω 1 = r2ω 2
Рис. 1.8 Передаточное число определяется отношением угловых скоростей или радиусов ведущего и ведомого колес.
В случае передачи вращения зубчатыми колесами передаточное число определяется как:
где z1 и z2 – числа зубьев ведущего и ведомого колес (т.к. число зубьев пропорционально среднему диаметру колеса). |
Последнее изменение этой страницы: 2017-04-13; Просмотров: 520; Нарушение авторского права страницы