
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Мгновенный центр скоростей (МЦС)
Теорема Эйлера-Шаля доказывает, что любое непоступательное перемещение фигуры в плоскости можно осуществить поворотом вокруг некоторого неподвижного центра. В соответствии с этим легко доказывается, что при плоско-параллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нолю. Эту точку называют мгновенным центром скоростей (МЦС). В учебниках эту точку пишут с индексом V, например PV, CV. При определении положения МЦС скорость любой точки может быть записана: VM=VCV+VMCV, где точка СV выбрана за полюс. Поскольку это МЦС и VCV=0, то скорость любой точки определяется как скорость вращении вокруг мгновенного центра скоростей.
Из рис. 1.5 видно, что мгновенный центр скоростей лежит в точке пересечения перпендикуляров, проведенных к скоростям точек, при этом всегда справедливо соотношение
Рис. 1.5
На нижеприведенных рисунках показаны примеры определения положения мгновенного центра скоростей и приведены формулы для расчета скоростей точек.
Для рисунка 1.6: 1. СV совпадает с точкой В VB=0. Шатун АВ вращается вокруг точки В
2.
3. МЦС лежит в «бесконечности»
4.
Рис. 1.6
Рис. 1.7
Рис. 1.8
здесь VB II VA В этом случае МЦС находится в “бесконечности”, т.е
Рис. 1.9
Формулы справедливы при отсутствии проскальзывания в точке СV.
Рис. 1.10
Мгновенный центр ускорений (МЦУ) В учебной литературе доказывается, что при движении фигуры в плоскости в каждый момент времени существует такая точка плоской фигуры, ускорение которой в этот момент равно нолю. Эту точку называют мгновенным центром ускорений (МЦУ). В наших рассуждениях будем обозначать ее буквой Q. Взяв эту точку за полюс, получим формулу для определения ускорения произвольной точки:
Рис. 1.12
Угол, который составляет вектор ускорения точки М с линией MQ определится из соотношения:
Т.е. у всех точек плоской фигуры этот угол одинаков. Из рис. 1.12 видно, что мгновенный центр ускорений лежит в точке пересечения линий, составляющих угол γ с соответствующими ускорениями точек. На рис. 1.13-1.15 приведены частные случаи определения положения мгновенного центра ускорений.
Сложное движение точки
Законы Ньютона сформулированы для движения точки по отношению к инерциальным системам отсчета. Для определения кинематических параметров точки при движении относительно произвольно движущейся системы отсчета вводится теория сложного движения.
Сложным называют движение точки по отношению к двум или нескольким системам отсчета.
Рисунок 3.1
На рисунке 3.1 показаны: - условно принимаемая за неподвижную система отсчета O1x1y1z1; - движущаяся относительно неподвижной система отсчета Oxyz; - точка M, перемещающаяся по отношению к подвижной системе отсчета. Движение точки M в данном случае является сложным. Её движение по отношению к подвижной системе отсчета называют относительным движением.
Движение той точки подвижной системы отсчета, в которой в данный момент находится движущаяся точка, по отношению к неподвижной системе отсчета называют переносным движением. Движение точки M по отношению к неподвижной системе отсчета называют абсолютным движением.
По аналогии с этими определениями будут называться относительные, переносные и абсолютные скорости и ускорения точки. Для их обозначения в относительном движении часто всего используется индекс r (relative – относительный) - Vr, ar ; в переносном движении индекс e (entrained - увлекать за собой) - Ve, ae.
Рисунок 3.2
Ниже приведен пример сложного движения точки - M.
На рисунке 3.2, а показан квадрат, вращающийся в плоскости чертежа вокруг неподвижной точки. По стороне квадрата движется точка M. Она участвует в двух движениях, поэтому можно ввести две системы отсчета: неподвижную, например, O1x1y1z1 - по отношению к которой вращается квадрат и подвижную Oxyz , скрепленную с квадратом, по оси Oy которой движется точка M (рисунок 3.2, б).
Движение точки M по стороне квадрата (по оси Oy скрепленной с квадратом подвижной системы) является относительным - скорость в этом движении Vr. Вращение точки M вместе с квадратом - переносное движение, скорость в этом движении - Ve. Абсолютное движение является результатом сложения переносного и относительного движений.
|
Последнее изменение этой страницы: 2017-04-13; Просмотров: 692; Нарушение авторского права страницы



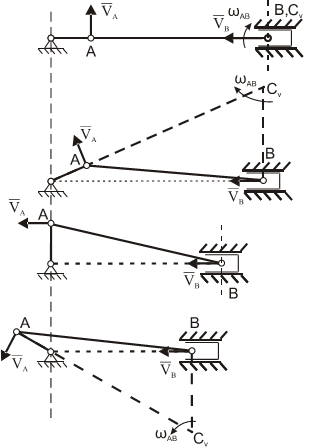

















 Рис. 1.13а
Рис. 1.13а

 Рис. 1.13б
Рис. 1.13б

 Рис. 1.14а
Рис. 1.14а

 Рис. 1.14б
Рис. 1.14б

 Рис. 1.15а
Рис. 1.15а

 Рис. 1.15б
Рис. 1.15б

