|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Проверка декартовой системы координат
При воспроизведении данных позиционирования в декартовых координатах для проверки используется номер системы координат, используемой при написании программы. Если указан один из номеров системы координат с 0 по 9, и заданный номер системы координат не согласуется с номером системы координат выбранной в настоящий момент, программа не выполняется. Номер системы координат задается для данных позиционирования при вводе положения в режиме обучения. Для изменения записанного номера системы координат используйте функцию изменения инструмента/функцию изменения системы координат (опция). Также, возможно задать номер используемой системы координат командной строкой в тексте программы. Номер системы координат инструмента USER TOOL (UT) Номер системы координат фланца или системы координат инструмента задается как номер системы координат инструмента (UT). Этот номер определяет систему координат инструмента. - 0: Используется система координат фланца. - с 1 по 9: Используется система координат инструмента, имеющая заданную систему координат инструмента. - F: Используется система координат, имеющая номер системы координат инструмента, выбранной в настоящий момент. Номер системы координат пользователя USER FRAME (UF) Номер базовой системы координат или системы координат пользователя задается как номер системы координат пользователя (UF). Этот номер определяет систему координат рабочей зоны. - 0: Используется базовая система координат. - с 1 по 9: Используется система координат пользователя, имеющая заданную систему координат пользователя. - F: Используется система координат, имеющая номер системы координат пользователя, выбранной в настоящий момент. Порядок выполнения работы 1. Включите питание робота; 2. Проверьте положение трехпозиционного переключателя режимов и выключатель пульта обучения; 3. Откорректируйте скорость подачи; 4. Установите систему координат (см. лабораторную работу №1) 5. Создайте программу перемещения робота: 5.1. Нажмите клавишу MENU (меню), чтобы отобразить экранное меню (см. рис. 1.11). 5.2. Выберите SELECT. 5.3.Нажмите клавишу F2 [CREATE] (создать). 5.4. Введите имя программы, нажимая функциональные клавиши, соответствующие символам в имени программы (имя программы вводится без пробела, начальный символ должен не содержать цифру). 5.5. После ввода имени программы нажмите 2 раза клавишу ENTER. 5.6. Переместите робота, с помощью клавиш толчковой подачи в нужное положение в рабочей зоне. 5.7. Для записи этой точки нажмите клавишу F1 [POINT], чтобы отобразить меню стандартных команд перемещения (рис. 2.7).
Рис. 2.7 Пример программы: меню стандартных команд перемещения
5.8. Выберите стандартную команду перемещения, вводимую в режиме обучения, нажмите клавишу ENTER и укажите нужную команду перемещения. Точка записана. 5.9. Повторите пункты 5.6., 5.7., 5.8. для каждой точки заданной траектории. 6. Для изменения типа перемещения, скорости подачи, типа позиционирования или дополнительной команды перемещения переместите курсор к пункту команды и с помощью цифровых клавиш, или функциональных клавиш скорректируйте позицию команды. 7. Для изменения данных позиционирования переместите курсор в номер строки, в которой отображается команда перемещения, которую необходимо изменить переместите робот в новое положение и нажмите F5 [TOUCHUP] (обучение) при нажатой клавише SHIFT. Новое положение записано. 8. Запустите программу при помощи пульта обучения - нажмите клавишу STEP для пошагового отслеживания хода программы, либо выполните непрерывное тестирование - выполнение программы в прямом направлении с текущей строки программы до конца программы (до символа End), а затем используйте клавишу SHIFT+RESET (для сброса ошибки) далее SHIFT и клавиши FWD или BWD. Удерживайте нажатой клавишу SHIFT, пока выполнение программы не закончено. Если клавиша SHIFT отпускается, программа приостанавливается. Убедитесь в правильности программы – робот движется по заданной траектории. Варианты заданий
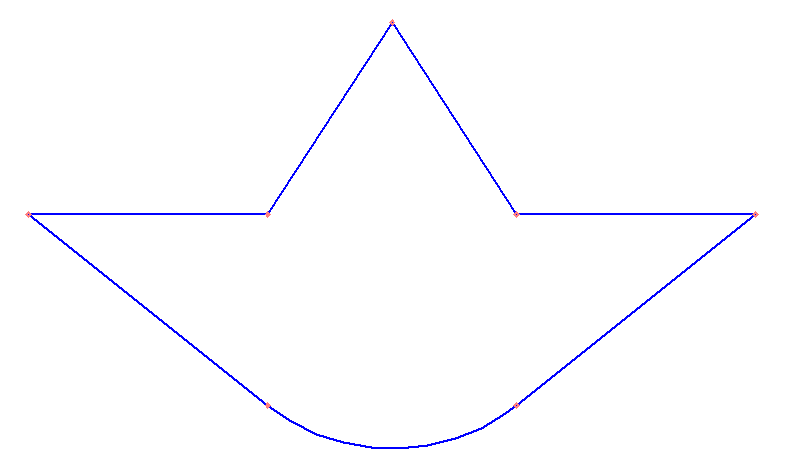
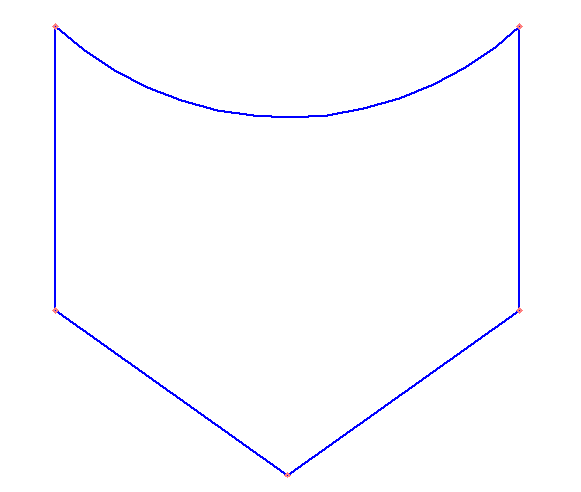
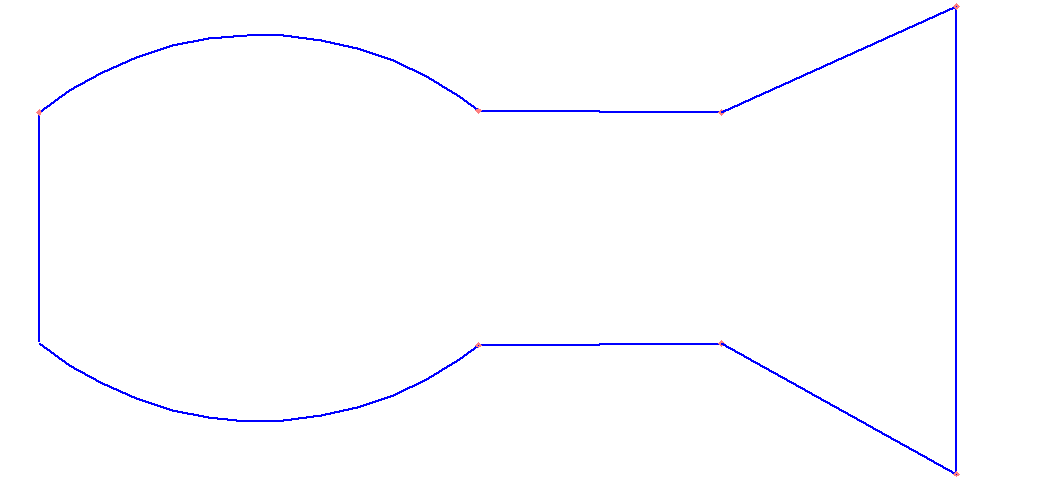
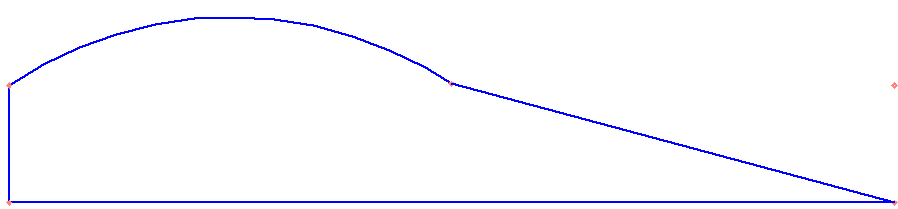
Размеры, а также плоскость, в которой будет перемещаться робот, задаются преподавателем. Содержание отчета Отчет должен содержать цель работы, чертеж траектории движения робота с указанием перечня точек, в которых робот будет делать остановки, программу движения робота, ответы на контрольные вопросы. Контрольные вопросы 1. Какие существуют форматы движения робота? 2. Назовите отличия поворота от кругового движения. 3. Как можно изменить скорость подачи? 4. В чем отличие команд FINE и CNT? 5. В чем главное отличие системы координат пользователя от системы координат инструмента?
Лабораторная работа № 3 |
Последнее изменение этой страницы: 2017-05-05; Просмотров: 128; Нарушение авторского права страницы