|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор электродвигателя для автоматизированного электропривода.Стр 1 из 4Следующая ⇒
Выбор электродвигателя для автоматизированного электропривода.
Нагрузочная диаграмма. Выбор двигателя по нагреву.
3.Структурная схема автоматизированного эл.привода, предъявляемые требования к эл.приводу ЭП- эл/механ система, состоит из эл/привода преобраз-го, передаточного и управляющего устройства, предназначение которого приводить в действие исполнительных органов машины и управление этим двигателем.
Требования к ЭП: 1. надёжность (способность выполнять заданные функции в оговоренных эксплуат. условиях); 2. точность (обеспечение необходимой точности). Всегда существует допустимое отклонение от заданных значений за которое нельзя выходить; 3. быстродействие (способность системы достаточно быстро реагировать на различные воздействия); 4. качество динамических процессов )обеспечение определённых закономерностей их протекания во времени); 5. энергетическая эффективность; 6. совместимость эл/привода с СЭС и информационными системами более высокого уровня.
Классификация эл.приводов ЭП классифицируют по: 1. виду движения: вращательное и поступательное, однонаправленное и реверсивное движения. Они имеют непрерывный или дискретный характер. 2. по степени управляемости: нерегулируемый (использ. механ. привод с одной постоянной скоростью); регулируемый (путём воздействия на эл/привод, скорость движения изменяется); следящий – автоматический отрабатывающий перемещение исполнительного механизма с определённой точностью в соответствии с производ. и изменяется задающим сигналом; программно-управляемый – управление в соответствии с заданной программой; адаптивный – автоматиз. обеспечивающий оптимальный режим движения. исполнительного механизма при изменении условий работы 3. по роду механич. передаточного устройства: редукторный эл/привод и безредукторный эл/привод (механизм на валу). 4. по роду эл/преобразующего устройства: система генератор-двигатель (Г-Д) – регулируемый ЭП преобразовательной установки которого является эл/магнитный преобразователь; системно-выпрямительный двигатель (УВ-Д) –вентильный ЭП постоянного тока, преобразов. установкой которого является регулируемый выпрямитель; система преобразовательной частоты (ПЧ-Д)-вентильный ЭП переменного тока, преобразов. установкой которого является преобразователь частоты. 5. по способу передачи механ. энергии: групповой ЭП – обеспечивающий движение исполнительных органов нескольких рабочих машин; индивидуальный ЭП; взаимосвязанный ЭП – содержит 2 или несколько электр. или механич. связанныйх между собой эл/двигательных устройств. 6. по роду тока: постоянного или переменного тока.
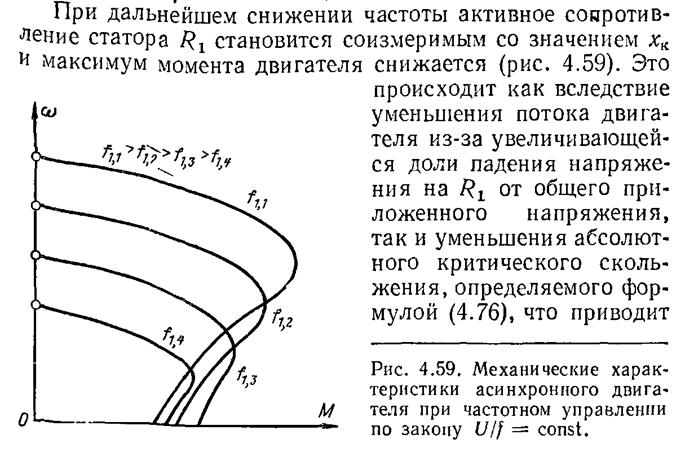
Построение механической характеристики АД.
Искусственные характеристики АД при изменении U и f.
Пуск СД. Способы пуска.
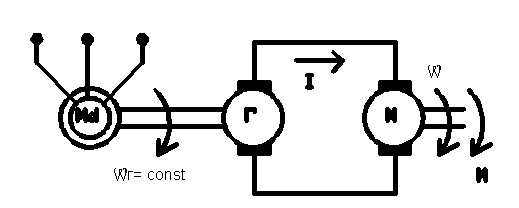
ЭП по системе Г-Д. Система ЭП, в которой для питания в цепи якоря двигателя используется ЭМ, получила название Г-Д.
Скорость вращения Д можно рассматривать изменяя подводимое напряжение с генератора, которое изменяется в зависимости от потока возбуждения обмоток ОВГ, а также изменением потока возбуждения Д. Для обеспечения реверса необходимо поменять полярность ОВГ путем переключения контактов КМ1 на КМ2. Для ЭДС генератора можно записать:
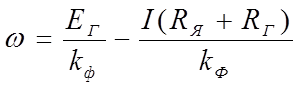
Из приведенного выражения следует, что изменении ЭДС генератора необходимо изменять Фг, тогда электромеханическая и механическая характеристика примет вид:
Из последнего выражения видно, что при изменении ЭДС генератора, пропорционально изменяется скорость идеального ХХ на искусственных характеристиках, а сами характеристики имеют больший наклон, чем естественная характеристика, из-за наличия Rг в выражении для перепада скорости Δ ω:
Как видно из рисунка характеристики располагаются во всех 4-ех квадрантах параллельно друг другу. При Ег = 0 Д работает в режиме динамического торможения. Диапазон реверса системы Г-Д, при однозонном регулировании составляет D = 10: 1. При 2х хоном управлении D = 30: 1. Достоинства: · Возможность получения всех эн. режимов работы в том числе и рекуперативного. · Управление процессом пуска, регулирование скорости торможения и реверса перенесено в цепи возбуждения, что облегчает и удешевляет аппаратуру управления из-за наличия малых токов. · Возможность плавного регулирования скорости в значительных приделах: до 30: 1 · Достаточно высокая жесткость и линейность характеристики. Недостатки: · Высокая Руст – в 3 раза превышает Рдв · Сравнительно низкий КПД вследствие трехкратного преобразования Е · Инерционность процесса регулирования · Дополнительный шум при работе ЭП по системе ТП-Д. Основным типом преобразователей, применяемым в настоящее время является полупроводниковые статические преобразователи, в основном тиристорные. Тиристорный привод постоянного тока представляет собой дальнейшее развитие системы Г-Д с тем отличием, что управляемый генератор заменен статическим тиристорным преобразователем, который служит для преобразования переменного тока в постоянный и для регулирования напряжения на стороне постоянного тока. Регулирование напряжения осуществляется изменением длительности работы тиристора в проводящую часть периода U~. Рассмотрим принцип регулирования напряжения системы ТП-Д на примере однофазного 2х полупериодного нереверсивного выпрямителя, собранного по нулевой схеме.
Преобразователь включает в себя согласующий трансформатор, тиристоры VS1 и VS2, сглаживающий дроссель L и систему импульсного фазоуправления (СИФУ). Регулирование напряжения на выходе преобразователя достигается изменением угла открывания α тиристоров (представляет собой угол задержки открытия тиристоров). Среднее значение выпрямленного напряжения на выходе преобразователя имеет вид:
Где
Еср.о – среднее значение выпремленного напряжения на ХХ при α = 0, т.е. при полностью открытых вентилях. U2ф – действующее значение фазного напряжения m- число фаз выпрямителя. Напряжение на выходе преобразователя имеет пульсирующий характер. Следовательно, с целью снижения пульсация в цепи якоря включается реактор L (дросель). Другим средством снижения пульсаций является применение многофазных схем выпрямления. Упавнение эл. мех и МХ двигателя в системе ТП-Д:
Хт, Rт – приведенные по вторичной обмотке индуктивного сопротивления рассеяния и активного сопротивления обмотки трансформатора; RL- активное сопротивление дросселя; Rя- сопротивление якорной цепи
МХ системы ТП-Д напоминают МХ Г-Д, но имеют ряд особенностей: · Характеристики имеют меньшую жесткость за счет большого падения напряжения в якорной цепи. · При конечных значениях индуктивности дросселя и при малых нагрузках наступает режим прерывистых токов, при котором жесткость резко снижается. Явление прерывистых токов обуславливается тем, что с изменением нагрузки снижается количество Е, запасенной в дросселе и наступает момент, когда создаваемая им ЭДС самоиндукции оказывается не достаточной для поддержания тока в момент, когда тиристор закрыт.
Выбор электродвигателя для автоматизированного электропривода.
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 872; Нарушение авторского права страницы











 В схеме можно выделить 3 основных элемента: 1. Механич. Часть привода (МЧ), которая включает рабочий механизм (РМ); передаточное устройство (ПУ), предназначенное для передачи механ. энергии от эл/двиг к исполнительному органу рабочей машины, и для изменения вида и скорости движения. 2. ЭД – предназначенное для преобразования электр. энергии в механическую или наоборот 2 элементами: электрон-механич. преобразователь (ЭМП) и ротор-двигатель (РД). 3. Система управления (СУ), состоит из преобразователя силового (П), управляющего устройства (У), задающего устройства (ЗУ), датчики обратной связи электрические (ДОСЭ), датчики обратной связи механические (ДОСМ1 и ДОСМ2).
В схеме можно выделить 3 основных элемента: 1. Механич. Часть привода (МЧ), которая включает рабочий механизм (РМ); передаточное устройство (ПУ), предназначенное для передачи механ. энергии от эл/двиг к исполнительному органу рабочей машины, и для изменения вида и скорости движения. 2. ЭД – предназначенное для преобразования электр. энергии в механическую или наоборот 2 элементами: электрон-механич. преобразователь (ЭМП) и ротор-двигатель (РД). 3. Система управления (СУ), состоит из преобразователя силового (П), управляющего устройства (У), задающего устройства (ЗУ), датчики обратной связи электрические (ДОСЭ), датчики обратной связи механические (ДОСМ1 и ДОСМ2).












 ;
; 


 ,
,