|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методы регулирования скорости эл.привода
Методы регулирования скорости эл.приводов могут быть разбиты на следующие основные группы: 1. параметрические методы 2. методы, связанные с питанием от отдельного источника энергии В основу параметрических методов положено изменение тех или иных параметров двигателя или отдельных цепей. Ко 2-й группе относятся методы регулирования скорости, основанные на применении специальных агрегатов или преобразователей эл.энергии: машинных или полупроводниковых, в которых возможно изменение в широких пределах напряжения или частоты тока. Для эл.двигателей постоянного тока в качестве таких источников используют различного рода управляемые выпрямители. Наиболее широкое применение получили электромашинные и вентильные преобразователи. Электромашинный преобразователь представляет собой генератор постоянного тока, приводимый во вращение синхронным или асинхронным двигателем. Изменение напряжения на зажимах генератора производится за счет изменения его потока возбуждения. Регулирование напряжения на зажимах вентильных преобразователей может осуществляться изменением угла открытия вентилей.
Кроме указанных способов возможен также импульсный способ регулирования напряжения, когда якорь двигателя периодически отключается и подключается к ИП. Для АД могут быть использованы: 1. питание двигателя от источника переменной частоты 2. каскадные установки, обеспечивающие введением добавочного ЭДС во вторичную цепь двигателя. При применении частотного регулирования возникает необходимость одновременного изменения частоты и напряжения ИП в соответствии с законом частотного регулирования
Из выражения следует, что при изменении напряжения ИП U1
и регулировании его частоты изменяется магнитный поток, что крайне нежелательно. Изменение частоты ИП позволяет регулировать скорость АД как выше, так и ниже основной. Обычно при регулировании выше основной скорости частота ИП превышает номинальную не более, чем в 1, 5-2 раза. Регулирование скорости ниже основной осуществляется в диапазоне 10-15. Нижний предел скорости ограничен сложностью изготовления преобразователей ИП с низкой частотой. Оригинальным способом является метод регулирования скорости АД с фазным ротором путем введения добавочного ЭДС в цепь ротора. Это так называемые каскадные установки, которые обеспечивая регулирование скорости позволяют одновременно полезно использовать энергию скольжения, которая в обычных двигателях рассеивается в регулирующих сопротивлениях.
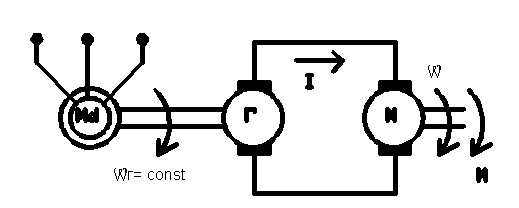
ЭП по системе Г-Д. Система ЭП, в которой для питания в цепи якоря двигателя используется ЭМ, получила название Г-Д.
Скорость вращения Д можно рассматривать изменяя подводимое напряжение с генератора, которое изменяется в зависимости от потока возбуждения обмоток ОВГ, а также изменением потока возбуждения Д. Для обеспечения реверса необходимо поменять полярность ОВГ путем переключения контактов КМ1 на КМ2. Для ЭДС генератора можно записать:
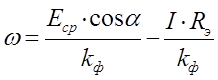
Из приведенного выражения следует, что изменении ЭДС генератора необходимо изменять Фг, тогда электромеханическая и механическая характеристика примет вид:
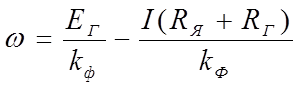
Из последнего выражения видно, что при изменении ЭДС генератора, пропорционально изменяется скорость идеального ХХ на искусственных характеристиках, а сами характеристики имеют больший наклон, чем естественная характеристика, из-за наличия Rг в выражении для перепада скорости Δ ω:
Как видно из рисунка характеристики располагаются во всех 4-ех квадрантах параллельно друг другу. При Ег = 0 Д работает в режиме динамического торможения. Диапазон реверса системы Г-Д, при однозонном регулировании составляет D = 10: 1. При 2х хоном управлении D = 30: 1. Достоинства: · Возможность получения всех эн. режимов работы в том числе и рекуперативного. · Управление процессом пуска, регулирование скорости торможения и реверса перенесено в цепи возбуждения, что облегчает и удешевляет аппаратуру управления из-за наличия малых токов. · Возможность плавного регулирования скорости в значительных приделах: до 30: 1 · Достаточно высокая жесткость и линейность характеристики. Недостатки: · Высокая Руст – в 3 раза превышает Рдв · Сравнительно низкий КПД вследствие трехкратного преобразования Е · Инерционность процесса регулирования · Дополнительный шум при работе ЭП по системе ТП-Д. Основным типом преобразователей, применяемым в настоящее время является полупроводниковые статические преобразователи, в основном тиристорные. Тиристорный привод постоянного тока представляет собой дальнейшее развитие системы Г-Д с тем отличием, что управляемый генератор заменен статическим тиристорным преобразователем, который служит для преобразования переменного тока в постоянный и для регулирования напряжения на стороне постоянного тока. Регулирование напряжения осуществляется изменением длительности работы тиристора в проводящую часть периода U~. Рассмотрим принцип регулирования напряжения системы ТП-Д на примере однофазного 2х полупериодного нереверсивного выпрямителя, собранного по нулевой схеме.
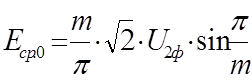
Преобразователь включает в себя согласующий трансформатор, тиристоры VS1 и VS2, сглаживающий дроссель L и систему импульсного фазоуправления (СИФУ). Регулирование напряжения на выходе преобразователя достигается изменением угла открывания α тиристоров (представляет собой угол задержки открытия тиристоров). Среднее значение выпрямленного напряжения на выходе преобразователя имеет вид:
Где
Еср.о – среднее значение выпремленного напряжения на ХХ при α = 0, т.е. при полностью открытых вентилях. U2ф – действующее значение фазного напряжения m- число фаз выпрямителя. Напряжение на выходе преобразователя имеет пульсирующий характер. Следовательно, с целью снижения пульсация в цепи якоря включается реактор L (дросель). Другим средством снижения пульсаций является применение многофазных схем выпрямления. Упавнение эл. мех и МХ двигателя в системе ТП-Д:
Хт, Rт – приведенные по вторичной обмотке индуктивного сопротивления рассеяния и активного сопротивления обмотки трансформатора; RL- активное сопротивление дросселя; Rя- сопротивление якорной цепи
МХ системы ТП-Д напоминают МХ Г-Д, но имеют ряд особенностей: · Характеристики имеют меньшую жесткость за счет большого падения напряжения в якорной цепи. · При конечных значениях индуктивности дросселя и при малых нагрузках наступает режим прерывистых токов, при котором жесткость резко снижается. Явление прерывистых токов обуславливается тем, что с изменением нагрузки снижается количество Е, запасенной в дросселе и наступает момент, когда создаваемая им ЭДС самоиндукции оказывается не достаточной для поддержания тока в момент, когда тиристор закрыт.
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 782; Нарушение авторского права страницы





 ;
; 


 ,
,