
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Регулирование скорости момента тока ДПТнв изменением сопротивления якорной цепи.
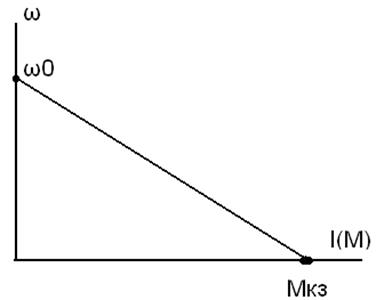
Реостатные характеристики ДПТнв Наклон характеристик прямо пропорционален перепаду скорости (Δ ω ). Поэтому по мере увеличения Rд наклон характеристики увеличивается, т.е они становятся более мягкими. Rд1< Rд2< Rд3 Для построения МХ необходимо знать лишь 2 ее точки, т.к хар-ки представляют собой прямые линии. Построение естественных механических характеристик производится по точкам (ω ном, Мном) и (ω 0, М=0). (ω ном) берется из паспортных данных, (Мноп) опред-тся из соотношений: Мном=с·Iном. (ω 0) определяется из: Eном=k·Ф·ω ном=Uном-Iном·Rя
Обычно в каталогах внутреннее сопротивление (Rя) не указывается. В этом случае его можно определить ориентировочно, считая что половина всех потерь в двигателе при номинальной нагрузке составляют потери меди в якоре
Пользуясь естественной МХ можно построить и реостатные характеристики. Они также строятся по 2-м точкам ω =ω 0 при М=0 и угловой скорости соответственно (Мном) при заданном (Rд). Тогда (ω ) определяется:
МХ может быть построена по точке идеального ХХ и точке КЗ.
Rд вводится для уменьшения пускового тока (Iдоп) Сопротивление резистора (Rд) в данном случае выбирается из условия обеспечения (Iдоп)
Определение величин добавочного сопротивления для ограничения пускового тока.
Реостатные характеристики ДПТнв Наклон характеристик прямо пропорционален перепаду скорости (Δ ω ). Поэтому по мере увеличения Rд наклон характеристики увеличивается, т.е они становятся более мягкими. Rд1< Rд2< Rд3 Для построения МХ необходимо знать лишь 2 ее точки, т.к хар-ки представляют собой прямые линии. Построение естественных механических характеристик производится по точкам (ω ном, Мном) и (ω 0, М=0). (ω ном) берется из паспортных данных, (Мноп) опред-тся из соотношений: Мном=с·Iном. (ω 0) определяется из: Eном=k·Ф·ω ном=Uном-Iном·Rя
Обычно в каталогах внутреннее сопротивление (Rя) не указывается. В этом случае его можно определить ориентировочно, считая что половина всех потерь в двигателе при номинальной нагрузке составляют потери меди в якоре
Пользуясь естественной МХ можно построить и реостатные характеристики. Они также строятся по 2-м точкам ω =ω 0 при М=0 и угловой скорости соответственно (Мном) при заданном (Rд). Тогда (ω ) определяется:
МХ может быть построена по точке идеального ХХ и точке КЗ.
Rд вводится для уменьшения пускового тока (Iдоп) Сопротивление резистора (Rд) в данном случае выбирается из условия обеспечения (Iдоп)
Энергетический режим работы ДПТнв. Рассмотрим хар-ки ДПТнв при разных полярностях питающего напряжения и в различных режимах.
1. Режим ХХ имеет место в точке А, где I=0, M=0, ω =ω 0, E=U=k·Ф·ω Энергия в системе не циркулирует, потери в якорной цепи отсутствуют 2. Режим КЗ. Наступает когда ω пропорционально 0 и Е= 0 В этом случае механическая мощность равна 0, электрическая энергия получаемая из сети, согласно Iкз=U/R рассевается в виде тепла в резисторах якорной цепи. 3. Двигательный режим имеет место на участке 1. при 4. ГН имеет место на участке 2. В этом режиме ω > ω 0 поэтому ЭДС становится> U сети, I и М меняет свое направление. Двигатель получает механическую энергию, преобразует в электрическую и отдает в сеть. 5. Режим генератора параллельно с сетью или режим торможения противовключения- участок 3. ω < 0. За счет изменения скорости изменяется направление ЭДС, которая теперь совподает по направлению с U сети отсюда Iя= (U+E)/ R. В данном режиме ЭМ потребляет эл. энергию из сети и мех. эн с вала механизма. Суммарная энергия расходуется в силовых цепях эл.двигателя, этот режим характеризуется большими электрическими потерями. 6. Режим динамического торможения. Имеет место при отключении якорной цепи от сети и закорачивании её на добавочный резистор или накоротко. Ток якоря протекающий под действием ЭДС определяется: I= -E/R, а тормозной момент Мт=-k·Ф·I - характеристика на рис. при U=0
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 596; Нарушение авторского права страницы

 с учетом;
с учетом; 









 , т.е в 1-вом квадранте где М и ω совпадают по направлению. В жтом режиме U> E. Электрическая энергия поступающая из сети преобразуется в механическую, часть энергии теряется в якорной цепи.
, т.е в 1-вом квадранте где М и ω совпадают по направлению. В жтом режиме U> E. Электрическая энергия поступающая из сети преобразуется в механическую, часть энергии теряется в якорной цепи.