
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Взаимосвязь ТАУ с другими техническими наукамиСтр 1 из 14Следующая ⇒
Кибернетика - наука об оптимальном управлении сложными системами (технические объекты, технологические процессы, живые организмы, коллективы, предприятия и др.). В кибернетике выделяется раздел технической кибернетики, как науки об управлении техническими объектами. В технической кибернетике выделяется теория информации – наука, занимающаяся сбором и обработкой информации, необходимой для управления техническими объектами и ТАУ.
Системой автоматического управления - называют совокупность управляемого объекта и автоматического управляющего устройства (регулятора), взаимодействующих между собой в соответствии с определенным алгоритмом управления. САУ – это такая система, в которой управляющие функции выполняются автоматически, т.е. без участия человека. АСУ (автоматизированная система управления) - это система, в которой часть управляющих функций выполняется автоматическими управляющими устройствами, а часть функций (наиболее важных и сложных) выполняется человеком. 1.3. Основные понятия и определения ТАУ Автоматическое регулирование - это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект. Автоматическое управление - это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
САР – система автоматического регулирования; ТАР – теория автоматического регулирования; САУ – система автоматического управления; ТАУ – теория автоматического управления.
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
Основные характеристики объекта управления.
Объектом управления в ТАУ могут быть любые технические объекты, технологические процессы, а также более простые САУ. Любой объект характеризуется рядом величин, определяющих процессы в самом объекте, влияние внешней среды на объект, управляющие сигналы с регулятора. Внешними воздействиями называют величины, влияющие на объект извне. Внешние воздействия бывают двух типов: 1. Управляющее воздействие (управляющий сигнал, управляющая входная величина) – это величина, характеризующая влияние регулятора на объект. 2. Возмущения -внешние воздействия, которые не управляют объектом, но оказывают влияние на функционирование объекта. Возмущения делятся на нагрузку – это внешние воздействия, обусловленные работой системы и помехи - вредное влияние внешней среды, обусловленное побочными явлениями в объекте.
Примеры объектов управления 1.
у = Н - управляемая величина (уровень жидкости); х = Q1 - управляющее воздействие (приток жидкости); z = Q2 – нагрузка (расход жидкости). Динамическая характеристика:
где S – площадь поперечного сечения резервуара. Y = f(X, Z, t) – взаимосвязь всех координат.
Каждый объект характеризуется двумя характеристиками (режимами): статической и динамической. Статическая характеристика (установившийся режим) – это характеристика, в которой постоянное входное воздействие Х и возмущение Z постоянны во времени, тогда управляемая величина Y = f(X, Z). Статические характеристики бывают монотонные и экстремальные.
Частным случаем статической характеристики является квазистатическая характеристика, когда на вход подается гармоническое воздействие (sin), тогда в установившемся режиме тоже будет гармоническая величина. Динамическая характеристика, когда управляемая величина Y не является постоянной во времени и описывается следующим уравнением: Y(t) = f(X(t), Z(t), t). Все переменные описываются системой обыкновенных дифференциальных уравнений (ОДУ), либо системой нелинейных дифференциальных уравнений (НДУ).
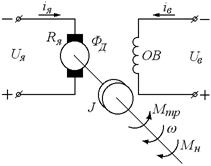
2. Электродвигатель постоянного тока. Фд - магнитный поток двигателя; iя - ток якоря двигателя; Uя - напряжение якоря двигателя; Rя - сопротивление якоря двигателя; iв - ток обмотки возбуждения; Uв - напряжение обмотки возбуждения; Мтр - момент трения, возникающий на валу двигателя; w - частота вращения вала двигателя; J - момент инерции механизма, приведенного к валу двигателя; Мнагр - момент нагрузки на валу двигателя. Запишем уравнения:
При статической характеристике все производные зануляются. a1 и c1 -конструктивные параметры двигателя; Фд - является нелинейной функцией от тока возбуждения; Мтр - является нелинейной функцией от частоты вращения вала двигателя; Управляющим воздействием является Х = Uя(Uв), управляемой величиной – У = w, нагрузка (внешнее воздействие) – Z = Uв(Uя), Мнагр, Мтр – помеха.
|
Последнее изменение этой страницы: 2017-05-06; Просмотров: 420; Нарушение авторского права страницы


 Величины, характеризующие изменения в самом объекте, называются внутренними величинами или состоянием объекта. Среди них следует выделить управляемую величину, по наблюдениям за которой и вырабатывается управляющее воздействие регулятора.
Величины, характеризующие изменения в самом объекте, называются внутренними величинами или состоянием объекта. Среди них следует выделить управляемую величину, по наблюдениям за которой и вырабатывается управляющее воздействие регулятора. - возмущение;
- возмущение;  - управляющее воздействие;
- управляющее воздействие;  - управляемая величина.
- управляемая величина.




 - динамические характеристики.
- динамические характеристики.