
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КРАТКИЕ СВЕДЕНИЯ О ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХСтр 1 из 6Следующая ⇒
КРАТКИЕ СВЕДЕНИЯ О ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ ВЕКТОРА СКОРОСТИ Доплеровские измерители предназначены для измерения горизонтальной составляющей вектора скорости летательного аппарата (ЛА), которая называется путевой скоростью V, и угла сноса. Скорость V складывается из двух составляющих (рисунок 1): скорости движения ЛА относительно воздушной среды – воздушной скорости Vв и скорости движения воздушной среды относительно Земли – скорости ветра Vвет. Направление Vв практически совпадает с продольной осью ЛА. Угол
Рисунок 1. Навигационный треугольник
Принцип действия ДИСС-16
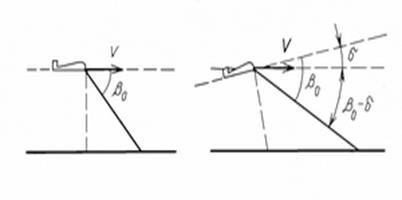
Принцип действия ДИСС наиболее просто может быть рассмотрен на примере однолучевого измерителя при использовании некоторых допущений: полет предполагается строго горизонтальным, скорость его постоянна, радиолуч бесконечно тонкий, игольчатый.
Рисунок 2. Геометрические соотношения в вертикальной и горизонтальной плоскостях для идеальной антенны
Геометрические соотношения в вертикальной и горизонтальной плоскостях показаны на рисунке 2. Радиолуч в вертикальной плоскости отклонен вниз от продольной оси самолета на постоянный угол β 0, а в горизонтальной плоскости – на угол
При β 0 = const, V = const, Годограф fД показан на рисунке 2 пунктирной линией. Если вращать антенну относительно вертикальной оси в направлении, в котором луч будет находиться в вертикальной плоскости, проходящей через вектор скорости V, то на выходе бортового приемника можно получить fД = fДmax. Это возможно при γ =0, а максимальное значение частоты Доплера определится выражением:
При этом угол между осью антенны и осью самолета, который достаточно просто измерить, будет равен углу сноса Таким образом, простейший бортовой доплеровский измеритель в принципе позволяет определить и величину, и направление путевой скорости.
Число лучей и их ориентация Рассмотренная выше схема однолучевого ДИСС имеет ряд существенных недостатков: – так как годограф fД(γ ) (см. рисунок 2) имеет малую крутизну – крены самолета – требуется высокая кратковременная стабильность частоты fД передатчика ДИСС: уход ее на
Рисунок 5. Влияние угла крена на погрешность измерения скорости
Существенно более высокими характеристиками обладают более сложные многолучевые ДИСС. Наибольшее распространение получили трех- и четырехлучевые антенные системы ДИСС конфигураций, представленных на рисунке 6. X- и Y-образные конфигурации используются в самолетах и космических аппаратах, а Т-образные – на вертолетах, для которых характерны большие углы сноса /1/.
Рисунок 6. Возможные расположения лучей в многолучевых ДИСС
Принцип работы многолучевого ДИСС рассмотрим на примере Х-образной системы (см. рисунок 7).
Рисунок 7. Годограф скорости для четырехлучевого Х-образного ДИСС
Все четыре луча в вертикальной плоскости отклонены вниз относительно горизонтальной плоскости на одинаковый угол β 0, а относительно продольной оси самолета – в противоположные стороны на одинаковый угол
Аналогично при включении лучей 2, 4:
Задача сводится к развороту антенной системы до получения равенства fγ 1, 3 = fγ 2, 4. Это соответствует равенству углов γ 1, 3 = γ 2, 4 = γ 0 / 2 и совмещению оси антенной системы с направлением вектора скорости. Измеряя углы между осями антенны и самолета, определим угол сноса
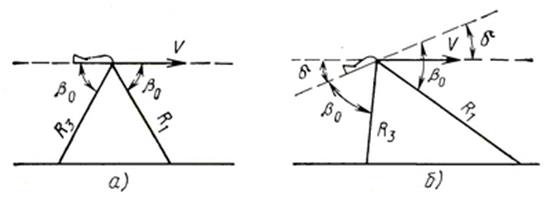
Основные преимущества многолучевого ДИСС: 1) Рабочему положению оси антенны после ее разворота соответствует большая крутизна 2) При отсутствии крена (рисунок 8а):
При наличии крена (рисунок 8б):
При Таким образом, в многолучевой системе на каждый градус крена вносится погрешность 0, 02% от fД, т.е. примерно в 250 раз меньше, чем в однолучевой системе. Причина этого проста: погрешности, вносимые креном в fД1 и fД3, имеют противоположный знак и при суммировании fД1 и fД3 компенсируются.
Рисунок 8. Расположение лучей при отсутствии (а) и наличии (б) углов крена
3) В многолучевой системе, где выделяется частота биений между сигналами лучей-антиподов, важна стабильность частоты передатчика только на время разности хода лучей 1 и 3 (или 2 и 4):
При отсутствии крена (R1 = R3) требования к кратковременной стабильности частоты передатчика вообще снимаются. ОБЩИЕ СВЕДЕНИЯ О ДИСС-16 Структурная схема
Структурная схема, отражающая принцип действия и состав измерителя, приведена на рисунке 9. В доплеровском измерителе используется режим с непрерывным немодулированным излучением. Излучение и прием отраженных сигналов осуществляется раздельно по трем лучам (Y-система) без коммутации. Как и все доплеровские измерители, работающие в режиме непрерывного излучения, аппаратура измерителя ДИСС-16 содержит приемную и передающую антенны, приемопередатчик, систему узкополосной фильтрации (УПФ), вычислитель с индикатором и блок питания.
Рисунок 9. Структурная схема ДИСС
В ДИСС-1б впервые применен раздельный прием сигналов по каждому лучу без коммутации каналов. Это позволяет свести к минимуму погрешности, возникающие при кренах и тангажах самолета и снизить флуктуационные погрешности. Аппаратура полностью выполнена на полупроводниковых приборах и интегральных микросхемах. Особенностью построения доплеровской части измерителя является применение двух маломощных стабилизированных полупроводниковых СВЧ-передатчиков, частоты которых отличаются на 10 МГц. Первый передатчик П1 запитывает луч 1 антенны, второй П2 – лучи 2 и 3. Разнос частот передатчиков позволил исключить из схемы приемника гетеродин. При этом в качестве гетеродинирующего сигнала для канала 1 используется часть мощности передатчика П2, а для каналов 2 и 3 – часть мощности передатчика П1. Для выделения доплеровской частоты используется сигнал разностной частоты передатчиков П1 и П2, формируемый в специальном каскаде. В каждом из трех каналов используется своя система узкополосной фильтрации (УПФ), представляющая собой систему слежения за средней частотой входного сигнала, позволяющая уменьшить влияние помех, неизбежно действующих на выходе приемного тракта (входе измерителя fД). В настоящее время во всех современных ДИСС применяют системы УПФ, построенные на аналоговых или дискретно-аналоговых квадратурно-фазовых частотных различителях (КФР). В моноблоке осуществляется: – генерирование и излучение СВЧ-колебаний, стабилизированных кварцем; – прием, усиление и детектирование отраженных от земной поверхности сигналов раздельно в трех приемниках; – трехканальная узкополосная фильтрация – преобразование спектров доплеровских сигналов, принятых по каждому лучу, в последовательность импульсов с частотами, равными средним доплеровским частотам; – вычисление совместно с блоком ДВД путевой скорости и угла сноса. Каждая из трех систем УПФ содержит систему поиска и захвата доплеровского сигнала, построенную по принципу дифференциального автомата захвата, который в режиме слежения выдает сигнал «Работа», а в режиме поиска – «Память». В режиме «Память» в вычислителе скорости V и угла сноса В блоке ДВД осуществляется: – вычисление совместно с моноблоком V и – выдача данных V и – автоматический контроль работоспособности комплекса аппаратуры. Блок СП осуществляет вычисление и цифровую индикацию расстояния. В индикаторе осуществляется отработка и индикация значения скорости и угла сноса, световая индикация режима «Память», ручное переключение режимов «Суша – Море» и «Контроль – Работа». Блок ЛВД
Блок ЛВД содержит две следящие системы отработки и индикации путевой скорости V и угла сноса При переходе любого из трех устройств в режим поиска вырабатывается сигнал «Память», о чем сигнализирует надпись на индикаторе в виде буквы «П». С момента действия сигнала «Память» потребителю выдается запомненная информация о V и Если в режиме контроля за 40с не происходит захвата контрольного сигнала, то принимается решение о неисправности основного моноблока и вырабатывается сигнал на включение резервного моноблока
Блок счисления пути
Блок счисления пути осуществляет вычисление и индикацию в цифровом виде оставшегося пути по маршруту полета.
КРАТКИЕ СВЕДЕНИЯ О ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ ВЕКТОРА СКОРОСТИ Доплеровские измерители предназначены для измерения горизонтальной составляющей вектора скорости летательного аппарата (ЛА), которая называется путевой скоростью V, и угла сноса. Скорость V складывается из двух составляющих (рисунок 1): скорости движения ЛА относительно воздушной среды – воздушной скорости Vв и скорости движения воздушной среды относительно Земли – скорости ветра Vвет. Направление Vв практически совпадает с продольной осью ЛА. Угол
Рисунок 1. Навигационный треугольник
Принцип действия ДИСС-16
Принцип действия ДИСС наиболее просто может быть рассмотрен на примере однолучевого измерителя при использовании некоторых допущений: полет предполагается строго горизонтальным, скорость его постоянна, радиолуч бесконечно тонкий, игольчатый.
Рисунок 2. Геометрические соотношения в вертикальной и горизонтальной плоскостях для идеальной антенны
Геометрические соотношения в вертикальной и горизонтальной плоскостях показаны на рисунке 2. Радиолуч в вертикальной плоскости отклонен вниз от продольной оси самолета на постоянный угол β 0, а в горизонтальной плоскости – на угол
При β 0 = const, V = const, Годограф fД показан на рисунке 2 пунктирной линией. Если вращать антенну относительно вертикальной оси в направлении, в котором луч будет находиться в вертикальной плоскости, проходящей через вектор скорости V, то на выходе бортового приемника можно получить fД = fДmax. Это возможно при γ =0, а максимальное значение частоты Доплера определится выражением:
При этом угол между осью антенны и осью самолета, который достаточно просто измерить, будет равен углу сноса Таким образом, простейший бортовой доплеровский измеритель в принципе позволяет определить и величину, и направление путевой скорости.
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 99; Нарушение авторского права страницы
 между V и Vв, образованный в результате сноса ЛА ветром, получил название угла сноса.
между V и Vв, образованный в результате сноса ЛА ветром, получил название угла сноса.

 . Доплеровское приращение частоты определяется проекцией вектора скорости на радиолуч:
. Доплеровское приращение частоты определяется проекцией вектора скорости на радиолуч:  .
. .
. .
. в области fДmax, то измеритель обладает низкой точностью совмещения оси антенны с направлением вектора скорости с соответственно грубым определением угла сноса
в области fДmax, то измеритель обладает низкой точностью совмещения оси антенны с направлением вектора скорости с соответственно грубым определением угла сноса  ;
;  (рисунок 5) вносят недопустимо большую погрешность в измерение скорости (5%) fД на каждый градус крена /1/, что на порядок превышает допустимую суммарную ошибку;
(рисунок 5) вносят недопустимо большую погрешность в измерение скорости (5%) fД на каждый градус крена /1/, что на порядок превышает допустимую суммарную ошибку;  за время распространения радиоволны от бортовой антенны до отражающей площадки и обратно должен быть много меньше допустимой погрешности
за время распространения радиоволны от бортовой антенны до отражающей площадки и обратно должен быть много меньше допустимой погрешности  измерения fД /1/:
измерения fД /1/:  .
.

 . Поэтому лучи 1 и 3 развернуты относительно вектора скорости V на одинаковый угол γ 1, 3, а лучи 2 и 4 – на одинаковый угол γ 2, 4. Доплеровские приращения частоты для лучей 1 и 2, направленных по движению самолета, положительны, а для лучей 3 и 4, направленных против движения, – отрицательны, но по абсолютному значению для лучей антиподов (1, 3 или 2, 4) одинаковы. Лучи включаются попарно поочередно: 1, 3, затем 2, 4, затем 1, 3 и т.д. В приемном тракте выделяется частота биений между сигналами, принятыми парными лучами. Например, при включении лучей 1, 3 выделяется частота биений:
. Поэтому лучи 1 и 3 развернуты относительно вектора скорости V на одинаковый угол γ 1, 3, а лучи 2 и 4 – на одинаковый угол γ 2, 4. Доплеровские приращения частоты для лучей 1 и 2, направленных по движению самолета, положительны, а для лучей 3 и 4, направленных против движения, – отрицательны, но по абсолютному значению для лучей антиподов (1, 3 или 2, 4) одинаковы. Лучи включаются попарно поочередно: 1, 3, затем 2, 4, затем 1, 3 и т.д. В приемном тракте выделяется частота биений между сигналами, принятыми парными лучами. Например, при включении лучей 1, 3 выделяется частота биений: 
 .
. , а модуль вектора скорости V найдем, разрешив относительно V соотношение
, а модуль вектора скорости V найдем, разрешив относительно V соотношение
 .
. .
. поэтому относительная погрешность измерений, вносимая креном δ :
поэтому относительная погрешность измерений, вносимая креном δ :  .
. :
:  .
.
 .
.
 на его аналоговых выходах запоминается информация, предшествующая моменту перехода в режим поиска. Весь моноблок охвачен системой автоматического и тест-контроля.
на его аналоговых выходах запоминается информация, предшествующая моменту перехода в режим поиска. Весь моноблок охвачен системой автоматического и тест-контроля. , а также систему автоматического обнаружения отказа основного моноблока и переключения на резервный. В ЛВД использован принцип автоматизированного контроля.
, а также систему автоматического обнаружения отказа основного моноблока и переключения на резервный. В ЛВД использован принцип автоматизированного контроля.