
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Число лучей и их ориентация
Рассмотренная выше схема однолучевого ДИСС имеет ряд существенных недостатков: – так как годограф fД(γ ) (см. рисунок 2) имеет малую крутизну – крены самолета – требуется высокая кратковременная стабильность частоты fД передатчика ДИСС: уход ее на
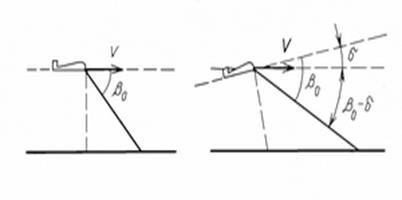
Рисунок 5. Влияние угла крена на погрешность измерения скорости
Существенно более высокими характеристиками обладают более сложные многолучевые ДИСС. Наибольшее распространение получили трех- и четырехлучевые антенные системы ДИСС конфигураций, представленных на рисунке 6. X- и Y-образные конфигурации используются в самолетах и космических аппаратах, а Т-образные – на вертолетах, для которых характерны большие углы сноса /1/.
Рисунок 6. Возможные расположения лучей в многолучевых ДИСС
Принцип работы многолучевого ДИСС рассмотрим на примере Х-образной системы (см. рисунок 7).
Рисунок 7. Годограф скорости для четырехлучевого Х-образного ДИСС
Все четыре луча в вертикальной плоскости отклонены вниз относительно горизонтальной плоскости на одинаковый угол β 0, а относительно продольной оси самолета – в противоположные стороны на одинаковый угол
Аналогично при включении лучей 2, 4:
Задача сводится к развороту антенной системы до получения равенства fγ 1, 3 = fγ 2, 4. Это соответствует равенству углов γ 1, 3 = γ 2, 4 = γ 0 / 2 и совмещению оси антенной системы с направлением вектора скорости. Измеряя углы между осями антенны и самолета, определим угол сноса
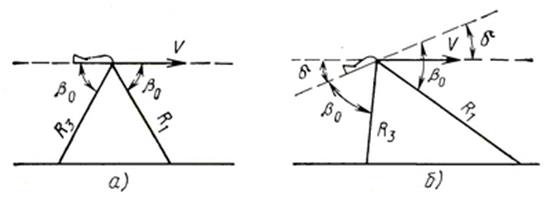
Основные преимущества многолучевого ДИСС: 1) Рабочему положению оси антенны после ее разворота соответствует большая крутизна 2) При отсутствии крена (рисунок 8а):
При наличии крена (рисунок 8б):
При Таким образом, в многолучевой системе на каждый градус крена вносится погрешность 0, 02% от fД, т.е. примерно в 250 раз меньше, чем в однолучевой системе. Причина этого проста: погрешности, вносимые креном в fД1 и fД3, имеют противоположный знак и при суммировании fД1 и fД3 компенсируются.
Рисунок 8. Расположение лучей при отсутствии (а) и наличии (б) углов крена
3) В многолучевой системе, где выделяется частота биений между сигналами лучей-антиподов, важна стабильность частоты передатчика только на время разности хода лучей 1 и 3 (или 2 и 4):
При отсутствии крена (R1 = R3) требования к кратковременной стабильности частоты передатчика вообще снимаются. ОБЩИЕ СВЕДЕНИЯ О ДИСС-16 |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 57; Нарушение авторского права страницы
 в области fДmax, то измеритель обладает низкой точностью совмещения оси антенны с направлением вектора скорости с соответственно грубым определением угла сноса
в области fДmax, то измеритель обладает низкой точностью совмещения оси антенны с направлением вектора скорости с соответственно грубым определением угла сноса  ;
;  (рисунок 5) вносят недопустимо большую погрешность в измерение скорости (5%) fД на каждый градус крена /1/, что на порядок превышает допустимую суммарную ошибку;
(рисунок 5) вносят недопустимо большую погрешность в измерение скорости (5%) fД на каждый градус крена /1/, что на порядок превышает допустимую суммарную ошибку;  за время распространения радиоволны от бортовой антенны до отражающей площадки и обратно должен быть много меньше допустимой погрешности
за время распространения радиоволны от бортовой антенны до отражающей площадки и обратно должен быть много меньше допустимой погрешности  измерения fД /1/:
измерения fД /1/:  .
.

 . Поэтому лучи 1 и 3 развернуты относительно вектора скорости V на одинаковый угол γ 1, 3, а лучи 2 и 4 – на одинаковый угол γ 2, 4. Доплеровские приращения частоты для лучей 1 и 2, направленных по движению самолета, положительны, а для лучей 3 и 4, направленных против движения, – отрицательны, но по абсолютному значению для лучей антиподов (1, 3 или 2, 4) одинаковы. Лучи включаются попарно поочередно: 1, 3, затем 2, 4, затем 1, 3 и т.д. В приемном тракте выделяется частота биений между сигналами, принятыми парными лучами. Например, при включении лучей 1, 3 выделяется частота биений:
. Поэтому лучи 1 и 3 развернуты относительно вектора скорости V на одинаковый угол γ 1, 3, а лучи 2 и 4 – на одинаковый угол γ 2, 4. Доплеровские приращения частоты для лучей 1 и 2, направленных по движению самолета, положительны, а для лучей 3 и 4, направленных против движения, – отрицательны, но по абсолютному значению для лучей антиподов (1, 3 или 2, 4) одинаковы. Лучи включаются попарно поочередно: 1, 3, затем 2, 4, затем 1, 3 и т.д. В приемном тракте выделяется частота биений между сигналами, принятыми парными лучами. Например, при включении лучей 1, 3 выделяется частота биений: 
 .
. , а модуль вектора скорости V найдем, разрешив относительно V соотношение
, а модуль вектора скорости V найдем, разрешив относительно V соотношение
 .
. .
. поэтому относительная погрешность измерений, вносимая креном δ :
поэтому относительная погрешность измерений, вносимая креном δ :  .
. :
:  .
.
 .
.