
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Метод наименьших квадратов. Оценка дисперсии ошибок.
Классическим вариантом оценивания параметров по наблюдениям, осложненным шумами, является метод наименьших квадратов (МНК). В этом случае наблюдения заданы в дискретные моменты времени, причем m=1, так что Таким образом уравнения наблюдений принимают вид Пусть
В матричном виде уравнение принимает вид
Допустим, что мы располагаем оценкой или в матричной форме Теперь можно построить остаточные разности указывающие на рассогласование наблюдений
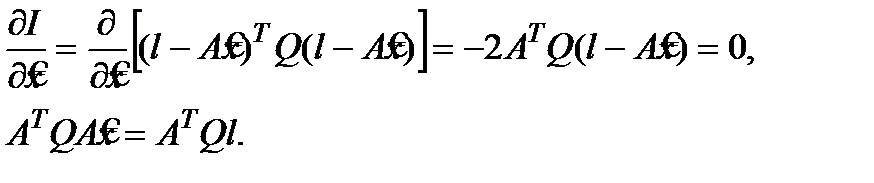
В матричном виде этот критерий имеет вид где Здесь Q – пока не определенная весовая матрица, обладающая свойством симметрии. Дифференцируя I по Следовательно, МНК-оценка вектора параметров имеет вид Погрешность оценки равна
Определим ковариационную матрицу погрешности оценки где R – ковариационная матрица ошибок измерений: поэтому R – диагональная матрица элементами которой являются дисперсии ошибок измерений. Очевидно, что для будем иметь В частном, но довольно распространенном случае, когда измерения равноточны, ковариационная матрица ошибки измерений имеет вид так что Величина Формула (10.2) показывает, что весовая матрица Q может быть определена с точностью до постоянного множителя. Действительно, заменяя Q на Обозначим через
а ковариационная матрица оценки будет отличаться от вида (10.5) множителем Для априорной оценки величину дисперсии единицы веса Отличие 1) число избыточных наблюдений 2) неудачно выбрана система весов наблюдений, дисперсии 3) измерения содержат систематические ошибки. Наконец, результат МНК-оценивания записывают в виде где
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 402; Нарушение авторского права страницы
 – скалярная величина. Матрица C(k) превращается в матрицу-строку. Для того чтобы сохранить традиционные для МНК обозначения, примем
– скалярная величина. Матрица C(k) превращается в матрицу-строку. Для того чтобы сохранить традиционные для МНК обозначения, примем


 , но погрешность r, естественно, нам неизвестна. Тогда можно предвычислить наблюдения
, но погрешность r, естественно, нам неизвестна. Тогда можно предвычислить наблюдения


 и вычисленных значений
и вычисленных значений  . Задача МНК-оценивания состоит в таком выборе вектора параметров
. Задача МНК-оценивания состоит в таком выборе вектора параметров  , чтобы минимизировать критерий качества, заданный в виде квадратичной формы
, чтобы минимизировать критерий качества, заданный в виде квадратичной формы


 (10.1)
(10.1) (10.2)
(10.2)

 . Полагая измерения независимыми, мы получим
. Полагая измерения независимыми, мы получим
 ,
,  (10.3)
(10.3) (10.4)
(10.4)

 называется дисперсией единицы веса, диагональные элементы матрицы
называется дисперсией единицы веса, диагональные элементы матрицы  – дисперсиями погрешностей составляющих вектора x.
– дисперсиями погрешностей составляющих вектора x. получим тот же результат
получим тот же результат
 вес измерения в момент
вес измерения в момент  . Весовая матрица (10.3) будет иметь вид
. Весовая матрица (10.3) будет иметь вид (10.5)
(10.5) – (10.6)
– (10.6) .
. нужно задать. Однако при достаточно большом объеме измерений оценку этой величины можно определить и апостериорно, т.е. после обработки данных измерений. Приведем эту формулу без вывода
нужно задать. Однако при достаточно большом объеме измерений оценку этой величины можно определить и апостериорно, т.е. после обработки данных измерений. Приведем эту формулу без вывода .
. от
от  недостаточно велико,
недостаточно велико,  не отражают реальную точность,
не отражают реальную точность, 
 – средняя квадратическая ошибка вектора x,
– средняя квадратическая ошибка вектора x,  ,
,  – j -й диагональный элемент матрицы
– j -й диагональный элемент матрицы  .
.