|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Електричні ВМ. Класифікація. Конструкції.
Електричні ВМ забезпечують перетворення електричного командного сигналу в перестановочне зусилля (момент) необхідний для позиціювання затвора РО. Дані приводи застосовують у системах, де основним видом енергії є електрична енергія. За вище приведеною класифікацією Електродвигунні ВМ поділяють на дві великі групи –електродвигунні (ЕдВМ) і електомагнітні (ЕмВМ). Ці ВМ дуже різноманітні як за конструкціями, так і сферами застосування. Проте за характером руху вихідного елемента їх можна поділити на прямоходові, поворотні та багатооборотні.Детальніше розглянемо приводи, які експлуатуються в Україні (переважно виробництва Росії) і їх частка є суттєвою в загальній кількості приводів регулюючої арматури. Електродвигунні ВМ Електродвигунні виконавчі механізми широко використовуються в системах автоматизації сумісно з різноманітною регулюючою або запірною трубопровідною арматурою (вентилями, кранами, засувками, клапанами тощо) або з виробничими механізмами (скребками, транспортерами, дозаторами і т.п.), або з технологічними агрегатами (насосами, компресорами і т.д.). При цьому використовуються ВМ необхідного призначення. В залежності від типу двигуна ЕдВМ поділяють на три основні групи: 1) ВМ, де використовуються електроприводи загальнопромислового призначення з програмним керуванням механізмами або зміною продуктивності агрегатів;. 2) ВМ, в яких використовуються електродвигуни загальнопромислового призначення; вони спряжуються з трубопровідною арматурою і використовуються для двопозиційного регулювання або дистанційного керування процесом; 3) ВМ, в яких використовуються спеціальні двигуни; вони спряжуються з різноманітними РО і використовуються для регулювання технологічних процесів. До першої групи ЕдВМ відносяться приводи, де основою є автоматизований силовий електропривод на базі двигунів постійного струму і двох та трифазних двигунів змінного струму. Ці засоби розглядаються в окремих дисциплінах. Друга група ЕдВМ базується на серійних електродвигунах промислового призначення. Вона служить для двопозиційного та дистанційного керування трубопровідною арматурою. Основними представниками цієї групи є ВМ серії М, А, Б, В, Г, Д. Ці ВМ відносяться до багатооборотних, відрізняються величиною максимального крутного моменту, конструкцією редуктора, способом обмеження максимального моменту на привідному валу. Конструктивно вони складаються з трифазного двигуна типів ФТ-0.12/2, АОЛ-11-2, ФЗ та АОС, черв'ячного або планетарного редуктора. Крім того, ВМ доповнюються другим дублером; кінцевими (шляховими) вимикачами та дистанційними покажчиками положень запірного органу. До третьої групи ЕдВМ відносяться спеціальні механізми, які з'єднуються з регулюючою арматурою. В загальному випадку вони складаються з електродвигуна, редуктора, вузла зворотного зв'язку, кінцевих вимикачів, а в деяких є давачі положення вихідного елемента. Загальна структура електродвигунного приводу показана на рис. 4.7.
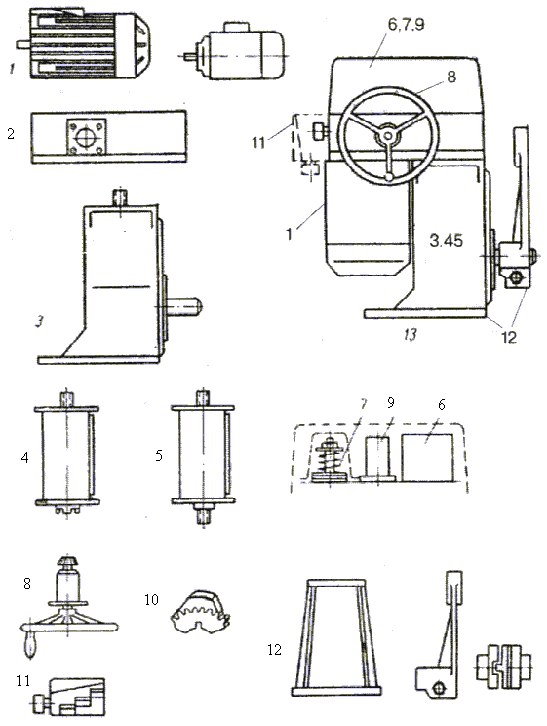
1 - регулюючий орган; 2 - електродвигун; 3 - силовий обмежувач; 4 - редуктор; 5 пристрій відключення маховика ручного дублера; 6 - направляючий пристрій; 7 - блок шляхових вимикачів; 8 - місцевий покажчик положення затвору РО; 9 - давач положення затвору РО; 10 - маховик (штурвал) ручного дублера; 11 - вимикач ручного дублера; 12 - пульт керування; 13 - гальмівний демпферний пристрій; І - коло живлення двигуна і гальма; Π - коло зв'язку з муфтою; III - коло шляхових вимикачів; IV - коло давача положення; V - коло керуючого сигналу; VI - коло живлення пульта керування. Рисунок 4.7 - Структурна схема ЕдВМ Привідний двигун є джерелом руху, а редуктор забезпечує перетворення, виду і швидкості руху вала двигуна у відповідний рух затвора РО. Силовий обмежувач попереджує поломки й перевантаження арматури, а гальмівний пристрій виключає вплив на арматуру інерції рухомих частин. Пристрій перемикання ручного дублера виключає можливість травматизму при обслуговуванні ВМ (механічне відключення двигуна від редуктора). Ручний дублер використовується для ручного керування й налагоджування АСР. Фіксуючий пристрій забезпечує збереження положення затвору в позиції, при якому він знаходився в момент зупинки двигуна. Шляхові вимикачі необхідні для сигналізації положення вихідного елемента ВМ, відключення двигуна від джерела енергії, блокування роботи приводу разом із роботою інших механізмів. Місцевий покажчик положення вихідного елемента забезпечує місцеву індикацію степені відкривання арматури в будь-який момент часу. Давач положення робочого органу ВМ використовується для дистанційного відслідковування степені відкривання арматури, а в АСР, як елемент зворотного зв'язку. Пульт керування в склад більшості конструкцій приводів не входить, але є його складовим елементом і служить для керування роботою приводу. ЕдВМ цієї групи за видом руху вихідного елемента поділяють на однооборотні (МЭО), багатооборотні (MЭM) і прямоходові (МЭП). У відповідності до ГОСТ 7І92-89 основні параметри приводів необхідно вибирати з таких рядів: 1) Номінальне навантаження (крутний момент або зусилля) на вихідному органі -для однооборотних ВМ: 1; 1.6; 2.5; 3.2; 4; 6.3; 8; 10; 12.5; 16; 25; 32; 40; 63; 80; 100; 125; 160; 250; 320; 400; 630; 800; 1000; 1250; 1600; 2500; 4000; 6300; 8000; 10000 Нм; -для багатооборотних ВМ: 6.3; 10; 12.5; 16; 25; 40; 63; 100; 125; 160; 200; 250; 400; 630; 800; 1000 Нм; -для прямоходових ВМ: 160; 250; 400; 500; 630; 800; 1000; 1600; 2000; 2500; 3200; 4000; 5000; 6300; 8000; 10000; 12500; 16000; 20000; 25000; 40000; 63000; 80000; 100000; 160000 Нм. 2)Номінальне значення повного ходу вихідного елемента: -для однооборотних ВМ: 0.0835; 0.25; 0.333; 0.5; 0.63; 0.75; 1 оборот; -для багатооборотних ВМ: 4; 6.3; 10; 25; 40; 63; 100; 160; 250; 400; 630; 1000 оборотів; -для прямоходових ВМ: 4; 5; 6.3; 8; 10; 12.5; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125; 125; 160; 250 мм. 3) Номінальне значення часу повного ходу вихідного елемента: 2.5; 4; 6.3; 8; 10; 12.5; 15; 16; 20; 25; З0; 32; 40; 50; 63; 80; 100; 160; 250; 400; 630 с. Крім того нормуються показники надійності: -середня наробка до відмови, год., не менше: · -середній строк служби, років, не менше: 12 (до 01.01.95) і 15 (з 01.01.95). Незважаючи на велику номенклатуру та строкатість ЕдВМ випускаються ВМ за блочно-модульним принципом. Складові елементи й схема утворення ВМ показана на рисунку 4.8. Всі механізми комплектуються однофазними асинхронними конденсаторними двигунами типу ДАУ або трифазними асинхронними двигунами типу АОЛ. Двигуни ДАУ мають підвищену надійність, що дозволяє їх роботу на механічні упори замість кінцевих вимикачів (це характерно для ВМ типу МЭО). Циліндричний швидкісний редуктор 2 утворює ряд за найбільшою величиною потужності застосованого двигуна. Кожний редуктор має три компоновки за величиною передавального відношення, яке постійне для всіх типорозмірів. Комплекс " двигун - швидкісний редуктор " утворюють базову компоновку ВМ, обертовий механізм, який працює в межах повного ходу від 0, 25 до 4 обертів вихідного валу. Силові циліндричні редуктор утворюють ряд за величиною вихідних моментів і мають одне і теж передавальне відношення. Приєднання до швидкісного редуктора багатообертовото вихідного органу 4 утворює обертовий механізм, який працює в межах повного ходу від 1.6 до 63 обертів вихідного шпинделя. Ці вузли утворюють також параметричний ряд. Приєднання прямоходового органу 5 реалізує прямоходовий механізм із величиною ходу від 16 до 630 мм. Прямоходовиий вихідний орган конструктивно виконаний як кульково-гвинтова пара, яка трансформує обертовий рух вихідного валу швидкісного редуктора в поступальний рух штоку. Ці вихідні органи утворюють ряд за величиною вихідного зусилля, а також мають два виконання за величиною повного ходу.
1 - електродвигун; 2 - швидкісний редуктор; 3, 4, 5 - відповідно силовий редуктор, багатооборотний вихідний орган і прямоходовий вихідний орган; 6 - блок датчиків і мікровимикачів; 7 - гальмо; 8 - ручний дублер; 9 -обмежувач моменту (зусилля); 10 - механічний упор (обмежувач ходу); 11 - клемна коробка; 12 - пристрої для з'єднання ВМ з РО; 13 - спосіб компоновки ВМ. Рисунок 4.8 - Модулі й схема утворення ВМ блочно-модульної конструкції На швидкісний редуктор 2 за замовленням можуть додатково установлюватись: механічне гальмо 7 і ручний дублер 8. Тут же монтують регульований пристрій обмеження моменту або зусилля, який виключає двигун при вибігу цих параметрів за уставки. Електричні обмежувачі ходу, а також пристрої для електричної сигналізації положення входять у блок датчиків 6. За вимогою споживача ВМ можуть комплектуватись і механічними упорами, які розміщуються всередині силового редуктора або багатообертового чи прямоходового вихідного органу. Пристрій для вводу зовнішніх приєднувальних кабелів 11 закріплюють на швидкісному редукторі. Для обмеження величини вибігу вихідного органу ЕдВМ при знятті керуючого сигналу використовують електромагнітні або механічні моментні гальма. Гальмівний пристрій ВМ типу МЭО має електромагнітний привід у вигляді соленоїда, який діє на гальмівну колодку вала електродвигуна (тобто фрикційний гальмівний пристрій). Іноді застосовують механічне моментне гальмо. Гальмо знаходиться, при відсутності моменту, на валу двигуна, при цьому диск притиснутий до гальмівного нерухомого кільця при допомозі пружини. Коли момент на валу двигуна зростає гальмівний диск піднімається вверх і стискує пружину, при цьому увесь привідний момент передається на вхідний вал редуктора. До недоліків механічного гальма слід віднести дещо більше запізнення у спрацюванні порівняно з електромагнітним, проте воно має вищу надійність, плавність роботи, зручність налагодження. Дещо за іншим принципом збудовані однообертові ВМ типу МЭО-К і МЭО-Б, які відносяться відповідно до групи контактних та безконтактних ВМ. Дані ВМ побудовані на базі сервомоторів (сервоприводів), тобто електродвигуна з редуктором. В даних виконавчих механізмах установлений двигун типу АОЛ (трифазний асинхронний). ВМ типу МЭО-К мають серводвигуни малої моделі РМ і великої моделі РБ із двоступеневим черв'ячним редуктором із загальним передавальним числом 2800. РМ розрахований на крутний момент до 250 Нּ м, а РБ -1000 Нּ м. Потужніші серводвигуни РБ-200 і РБ-400 мають крім двоступеневого черв'ячного редуктора циліндричний редуктор, що дає в сукупності передавальне число 5600. Для зменшення вибігу ВМ у даних приводах застосоване електричне конденсаторне гальмо, що представляє собою ємнісний опір, який під'єднується до обмоток електродвигуна через розмикаючі блок-контакта реверсивного магнітного пускача. Використовують гальмо типу ТЭК 30/60 для сервоприводу РМ і ТЭК 60/150 - для сервоприводу РБ (цифри означають величину ємності, що під'єднується до обмоток при включенні зіркою або трикутником). ВМ типу МЭО-Б мають двигуни з редуктором типу СЭ-25/120 і СЭ-100/120. Редуктор СЭ відрізняється від РМ або РБ тільки вмонтованим гальмівним пристроєм з електромагнітним приводом, з'єднаним через жорстку муфту з валом електродвигуна. Крім того відома низка ВМ із малим перестановочним зусиллям (моментом), які відносять до однообертових для позиційного регулювання типу ПР-М, ДР-М, ИМ-2/120, ИМТМ-4/2.5, а також колонки дистанційного керування КДУ. |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 347; Нарушение авторского права страницы