|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Типові схеми керування на базі перетворювачів частоти⇐ ПредыдущаяСтр 23 из 23
Нагадаємо, що керування перетворювачами частоти здійснюється за допомогою набору параметрів, які дозволяють здійснювати вибір, і навпаки, заборону тієї чи іншої функції, установку завдання параметра, а також контролювати поточне значення параметра. Параметри можна змінювати й установлювати кнопками мембранної клавіатури пульта керування для настроювання потрібних властивостей перетворювача, таких як час розвантажування, мінімальні й максимальні частоти і т.д. Номери обраних параметрів і встановлені значення параметрів указуються на чотиризначному цифровому дисплеї. Слід зазначити, що установка оптимальних режимів роботи частотно-керованого привода для забезпечення максимальної ефективності функціонування технологічного процесу — питання дуже непросте і чекає від персоналу знання й обліку особливостей як самого процесу, так і устаткування, де використовується привод. От чому іноді, як це зроблено, наприклад, у перетворювачах серії MICROMASTER Eco і MIDIMASTER Eco, з усього набору параметрів виділяють групу спеціально підібраних базових параметрів, настроювання яких дозволяє, для більшості найпростіших випадків застосування, швидко здійснити введення привода в експлуатацію. Інша група параметрів, умовно названа експертною, служить для точного настроювання перетворювача. При цьому доступ до другої групи для сторонніх, за замовчуванням, блокований. Описаний спосіб керування зручний на етапі введення й у процесі експлуатації для оперативної зміни настроювань перетворювача. Для використання ж частотно-керованого привода в складі АСУ ТП необхідно забезпечувати взаємодію перетворювача з іншими учасниками системи керування. Для цього в складі перетворювачів знаходиться розгалужена система вводу-виводу даних, що включає в себе дискретні й аналогові входи й виходи, а також послідовні інтерфейси. Як приклад, на рис. 8.8, приведена схема підключення ланцюгів керування перетворювача серії MICROMASTER Vector. У залежності від серії перетворювачі частоти Siemens мають від 3 до 6 програмованих дискретних входів, здатних ініціювати до 24 різних функцій керування. Усі ці функції можна умовно розділити на кілька груп. У першу групу можна віднести функції керування рухом двигуна, такими як пуск, зупинка, реверс, спосіб гальмування. Другу групу утворюють функції керування вихідною частотою перетворювача. Керування може бути здійснене шляхом вибору величини фіксованої частоти, визначеної для конкретного входу, чи шляхом формування двозначного коду стану за трьома входами (вісім значень). У цю ж групу входять функції плавної зміни вихідної частоти при активному стані відповідного дискретного входу. І, нарешті, третя група поєднує інші функції, що несуть службове навантаження (дозвіл дистанційного керування, скидання ознаки помилки і т.п.). Для живлення вхідних ланцюгів може бути використане або внутрішнє джерело живлення з вихідною напругою 15 В постійного струму, або зовнішнє джерело з напругою від 7, 5 до 33, 0 В постійного струму (рис.8.8).
Дискретні входи можуть бути активізовані різними способами, у тому числі механічними кнопками панелі керування, дискретними виходами різних керуючих пристроїв, таких як програмовані логічні контролери (ПЛК) чи пристрою розподіленого вводу-виводу (наприклад, серії ADAM-4000 фірми Advantech). Як приклад, можна розглянути систему регулювання продуктивності насоса водопровідного господарства відповідно до заданого добового графіка водоспоживання (рис.8.9). Зміна продуктивності здійснюється шляхом східчастої зміни швидкості обертання двигуна насоса за допомогою перетворювача частоти. Керуючим пристроєм системи може бути, наприклад, логічний модуль серії LOGO! фірми Siemens. а) схема керування насосом; б)добовий графік водоспоживання. Рисунок.8.9-Схема регулювання продуктивності насоса
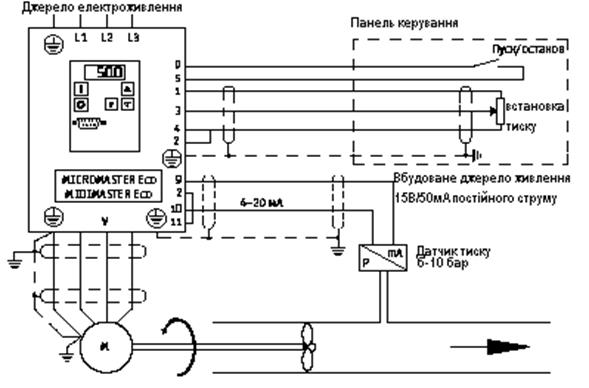
Наявність у цьому модулі годинника реального часу дозволяє, в заданий час доби, через дискретні виходи здійснювати вибір необхідного значення вихідної частоти перетворювача. При цьому може виявитися корисна особливість перетворювачів частоти Siemens, яка полягає в тому, що при одночасній активізації декількох входів перетворювача, через які здійснюється вибір фіксованих частот, вихідна частота буде дорівнює сумі обраних значень. Виходи, не задіяні для вибору частоти, можуть бути використані, наприклад, для пуску й зупинки привода насоса чи виконання інших функцій. Наявність аналогових входів у перетворювачах частоти дозволяє здійснювати безперервне й контрольоване керування вихідною частотою. Перетворювачі MICROMASTER мають один такий вхід, інші — два, що надають їм додаткові можливості по керуванню приводом. Кожен вхід, призначений для виконання цілком визначених функцій. Аналоговий вхід № 1 може бути використаний для формування, завдання частоти за допомогою сигналу у виді струму чи напруги. При цьому користувачеві доступний ряд цікавих можливостей. Наприклад, при дозволеному аналоговому вхідному керуванні, може бути заданий режим запуску перетворювача за допомогою вхідного сигналу при досягненні ним визначеного значення. А в перетворювачах серії MICRO/MIDIMASTER Vector можливо реверсивне керування електродвигуном при використанні біполярного сигналу ±10 В. Ручне керування через аналогові входи дуже просто може бути реалізоване при підключенні до перетворювача зовнішнього потенціометра з опором від 5 до 100 Ом, для живлення якого в перетворювачі передбачене спеціальне малопотужне джерело з вихідною напругою 10 В (рис.8.9). Сигнал із двигуна потенціометра подається на аналоговий вхід № 1, при цьому за замовчуванням переміщення двигуна від одного крайнього положення в друге буде викликати зміну значення вихідної частоти в межах від 0 до 50 Гц. Граничні значення діапазону можуть бути змінені шляхом зміни значень відповідних параметрів перетворювача. Наявність у перетворювачах Siemens вбудованої функції ПІД- чи ПІ-регулювання дозволяє здійснювати точне регулювання будь-якого зовнішнього параметра, поставленого в залежність від швидкості обертання двигуна: тиску на нагнітанні насоса, температури в системах вентиляції, витрати й ін. Звичайно, для роботи в цьому режимі потрібно застосування відповідного датчика зворотного зв'язку. Основне призначення аналогового входу № 2 перетворювача саме і складається в прийомі сигналу від такого датчика. Приклад використання частотно-керованого електропривода для стабілізації постійного тиску в системі водопостачання чи вентиляції приведений на рис.8. 11. Необхідне значення тиску задається через аналоговий вхід № 1 за допомогою потенціометра. Датчик тиску, у якості якого може бути використаний перетворювач SITRANS P серії Z фірми Siemens, перетворить тиск у трубопроводі в електричний сигнал 4-20 мA, що надходить на другий аналоговий вхід перетворювача частоти. Для електроживлення датчика призначене друге вбудоване джерело живлення з вихідною напругою 15 В і навантажувальною здатністю 50 мА. Установка коефіцієнтів підсилення пропорційної, інтегральної і диференціальної ланок ПІД-регулятора здійснюється через відповідні параметри перетворювача.
Рисунок 8.11-Система підтримування постійного тиску з використання ПІД- регулятора. Усі описані способи керування перетворювачами частоти є прикладами місцевого керування. Крім того, існує можливість і дистанційного керування з доступом до всіх параметрів перетворювача. Ця можливість може бути реалізована через використання вбудованого в кожен перетворювач частоти послідовного інтерфейсу, що відповідає стандарту EIA RS-485. У мережу передачі даних на базі інтерфейсу RS-485 можна об'єднати 31 перетворювач, кожний з який має свою унікальну адресу, що задається через відповідний параметр. Керування перетворювачами, об'єднаними в мережу, здійснює провідний пристрій, у якості якого може виступати комп'ютер, ПЛК чи зовнішній пульт керування перетворювача. Для обміну даними використовується розроблений фірмою Siemens протокол USS, що підтримується перетворювачами частоти всіх серій. Цей протокол реалізує конфігурацію «провідний-ведений», при якій ініціатором обміну є провідний пристрій, а ведений лише відповідає на повідомлення, передане на його адресу. Крім того, протоколом USS передбачений і широкомовний режим обміну, при якому адресатами повідомлення є всі пристрої мережі. Максимальна швидкість обміну, підтримувана протоколом USS, дорівнює 19 кБод. Повідомлення має фіксовану довжину 14 байтів, кожний з який має стандартний для пристроїв з асинхронним режимом обміну формат: 1 старт-біт, 8 бітів даних, біт контролю парності й стоп-біт. Це, а також приступність докладного опису протоколу, забезпечує користувачеві можливість реалізації протоколу USS для власного керуючого пристрою. Для окремих серій перетворювачів додатково може бути використаний модуль, що дозволяє виконати підключення перетворювача до промислової мережі PROFIBUS-DP. За допомогою такого модуля забезпечується простий і недорогий спосіб інтеграції частотно-регулюючого привода в систему автоматизації. Перспективною розробкою фірми Siemens є новий багатоцільовий перетворювач частоти серії MICROMASTER 420 для двигунів змінного струму потужністю від 120 Вт до 11 кВт (рис. 8.12). Цей перетворювач відрізняється новою дружньою стосовно користувача структурою параметрів, простим монтажем і введенням в експлуатацію, а також простотою інтеграції у системи автоматизації. Нове покоління представлене в трьох типорозмірах, і пропонує низку властивостей, що звичайно, відсутні в перетворювачах аналогічного класу: · точна характеристика U/f, що задається, дозволяє застосовувати перетворювач для роботи з асинхронними й синхронними двигунами; · 16 установок у розширеному режимі і більш 100 в експертному; · високоефективне динамічне гальмування постійним струмом і комбіноване гальмування; · автоматичний вибір частоти модуляції для безшумної роботи; · лічильник електричної енергії для обліку спожитої електроенергії; · модульна конструкція (знімна панель оператора для місцевого керування перетворювачем, розширена знімна панель оператора для керування групою, що складається максимально з 31 перетворювача, у протоколі USS). Багато перетворювачів даного класу використовуються в простих задачах позиціонування. При цьому перетворювач керується сигналами, що йдуть від датчиків, які інтегруються в робочий механізм. Завдяки оптимізації програмного забезпечення, досягнута висока швидкість реакції на зовнішні сигнали. Унаслідок цього MICRO-MASTER 420 вирішує задачі позиціонування з високою для даного класу точністю й швидкістю. Оптимізована швидкість реакції і для аналогових входів. Унаслідок цього можна працювати в таких недоступних раніше для перетворювачів даного класу режимах, як синхронізація обертання валів двох двигунів. Поряд із своїми хорошими технічними даними, MICROMASTER 420 так само простий при введенні в експлуатацію, як і перетворювачі попереднього покоління. Значно спрощують введення в експлуатацію структурованість і впорядкованість параметрів. Для швидкого стандартного настроювання перетворювача досить 12 параметрів. Рисунок 8.12-Перетворювач частоти серії MICROMASTER 420. MICROMASTER 420 — це перетворювач частоти, що на сьогоднішній час щонайкраще інтегрується в систему автоматизації Simatic незалежно від того, чи йде мова про мікроконтролер Simatic S7-200, що підключається через послідовний інтерфейс RS-485, чи про складну систему «провідний-ведений» з Simatic S7-300/S7-400,, зв'язок між елементами якої відбувається по шині PROFIBUS. Завдяки включенню приводної техніки в програму TIA (Totally Integrated Automation), забезпечується зручність у проектуванні, надійність у комунікації й інтегрованість у єдиний комплекс засобів АСУ ТП. Аналогічне обладнання для частотного регулювання електроприводу випускає фірма Danfoss. Прилади VLT серії 3000 включають велику номенклатуру перетворювачів для електродвигунів потужністю від 1, 1 до 250 КВт.Принцип дії перетворювачів ґрунтується на керуванні вектором напруги (SVC), а гальмування здійснюється постійним струмом. Перетворювачі VLT мають адаптивне налагодження режимів роботи, інтегровані ПІД-контролер та послідовний порт RS485 для спряження з АСК.Крім того, розглянуті пристрої, володіють додатковими цифровими та аналоговими входами –виходами, а також двома програмованими релейними виходами. Існуючі тенденції розвитку техніки й технології в області частотно-регульованого привода дозволяють стверджувати, що вже в недалекому майбутньому практично не залишиться нерегульованого електропривода. При цьому на перший план виходить проблема одержання максимальної економічної ефективності від його застосування, досягнення якої забезпечується, насамперед, через реалізацію комплексного підходу до питання використання регульованого привода в складі систем керування технологічними процесами. Можливості ж сучасних перетворювачів частоти дозволяють це робити дуже успішно.
9 ДИНАМІЧНІ ВЛАСТИВОСТІ ВИКОНАВЧИХ ПРИСТРОЇВ Для оцінки динамічних властивостей виконавчих пристроїв (ВП) використовують низку параметрів, так чи інакше пов'язаних із часом: запізнення, швидкість ходу, час переходу з одного сталого стану в інший, швидкодія (величина, обернена швидкості ходу). В електричних виконавчих механізмах час робочого ходу штока дорівнює 16 - 250 с (при перестановочних зусиллях 0, 063 – 16 кН). Ці дані відносяться до електродвигунних прямоходових і однообертових ВМ. У багатообертових ВМ час одного оберту вала дорівнює 1 - 16 с; повний робочий хід вихідної ланки відбувається за 160 обертів. Гідравлічні й пневматичні ВМ характеризуються значно вищою швидкодією. Час робочого ходу ненавантажених мембранних пневматичних механізмів складає 0, 4 — 5с. Час робочого ходу поршневого гідравлічного механізму визначається за формулою:
де D - діаметр поршня, мм; Sу - умовний хід, мм; Q - витрата рідини в гідроприводі, л/хв. Перераховані часові оцінки недостатні для розуміння поведінки виконавчих пристроїв у системі автоматичного регулювання. Необхідні оцінки визначаються експериментальним або розрахунковим шляхом, і являється собою результатом взаємодії конструктивних і структурних чинників, термодинамічних, газо- і гідродинамічних процесів, що відбуваються в різноманітних ланках виконавчого пристрою. Чималу роль відіграє і вид енергії, що створює перестановочне зусилля. Але для усіх видів ВП є загальні елементи, що визначають динаміку: маса рухливих частин, динамічна неврівноваженість затвора від дії потоку середовища, тертя в перехідній ланці від виконавчого механізму до регулюючого органу. Структура типової АСР (рис 9.1) включає в себе технологічний об'єкт ТО, регулятор Р і виконавчий пристрій ВП, а також вимірювальний канал ВК регульованої координати x. Регулюючий орган є складовою частиною ОК і враховується при складанні математичної моделі об'єкта, як аналітичної так і експериментальної. Динаміка вимірювального канала враховується в моделі тільки при екпериментальному методі досліджень.Тому каналом регулювання є " положення затвора l РО – вихідна координата x". Отже, при інтегруванні ВП у контур регулювання нас цікавить, перш за все, динаміка ВМ, оскільки вона впливає на формування закону керування.
Рисунок 9.1-Структура типової АСР Якщо РО не входить у структуру об'єкта, тоді користуються його витратними характеристиками. Як було показано раніше, витратна характеристика РО визначається багатьма чинниками, із яких можна виділити наступні: - параметри середовища - агрегатний стан, густина, в'язкість, температура, перепад тисків; - конструктивні особливості затвора і проточної частини корпуса; - структура гідравлічної системи трубопроводу, що визначає розподіл перепадів тисків на ВП і у трубопроводі. До структурних особливостей трубопроводу відноситься також тип джерела тиску (із постійним або змінним напором). Перераховані чинники впливають в основному на величину коефіцієнта підсилення регулюючого органу [ 1]. Динамічні випробування на потоці води показують ідентичність тимчасових характеристик ВП по ходу і по витратах (при лінійній пропускній характеристиці). Це дає підставу вважати регулюючий орган безінерційною динамічною ланкою і подавати його в динаміці підсилювальною ланкою. Тому докладніше розглянемо динамічні характеристики ВМ.
9.1 Димаміка пневматичних мембранних ВМ Складемо математична модель пневматичного мембранного ВМ, що описує елементи, на ділянці між пневматичною лінією передачі і вихідним елементом приводу.В [10] приведена математична модель пневматичного приводу, яка збудована з врахуванням наступних допущень: 1)Будемо вважати, що тертя, яке виникає при рухові штока, є в'язким, тобто сила тертя пропорційна швидкості його руху де b-коефіцієнт в'язкого тертя; s-хід вихідного елемента ВМ. 2) Рух газу в імпульсній пневмотрубці має ламінарний характер, тобто де G-витрата повітря в імпульсній трубці; α 1-коефіцієнт витрати; p1 -командний тиск; p2-тиск в камері ВМ. Розглянемо математичну модель у спрощеному виді без врахування РО і його витратних характеристик. Вхідною величиною пневматичного ВМ є командний тиск p1 , який формується регулятором, а вихідною- переміщення s вихідного елемента. Рівняння матеріального балансу для мембранної камери має вигляд де M-маса газу, який накопичується в мембранній камері. Маса повітря визначається через об'єм камери V і густину повітря ρ M=V·ρ. для ідеального газу має місце співвідношення ρ /ρ 0=p2/p0 , де ρ 0 і p0–відповідно густина і тиск при нормальних умовах. Необхідно також врахувати, що об'єм мембранної камери V залежить від положення штока s, тобто V=V(s). Враховуючи, зроблені допущення рівняння (9.1) можна переписати у такий спосіб де α 2=α 1·p0 /ρ 0 . На основі закону збереження кількості руху одержимо де m–маса рухомих частин ВМ; v=ds/dt -швидкість переміщення штока; Fм=Fеф·p2 -перестановочне зусилля ВМ; Fеф-ефективна площа мембрани; Fп=fпруж+c·s - зусилля розвинуте пружиною; c- жорсткість пружини; fпруж- сила попереднього стискування пружини; N - неврівноважене зусилля на затвор від дії потоку через РО( п.3.9), яке для двосідельного РО, наприклад, рівне N=δ p·Fc, де δ p– перепад тиску на РО, а Fc–площа неврівноваженого кільця затвора; Fт - зусилля тертя. Зусилля тертя у відповідності до прийнятих допущень буде складатись сили в'язкого тертя Fв.mр і сили тертя в ущільнюючому сальнику Fус.Сила тертя в сальнику не залежить від вхідних та вихідних параметрів моделі і визначається за формулами приведеними в п.3.9.Тому Враховуючи, що V(s) залежить від переміщення s одержимо V(s) =V0+Fзм·s, де V0 - початковий об’єм мембранної камери; Fзм=0, 64·D2-площа защемленої мембрани; D -діаметр заробки мембрани. Проведемо лінеаризацію нелінійного виразу V(s)·p2 в околі рівноважного стану.Оскільки s=s0+Δ s, p1=p10+Δ p1, p2=p20+Δ p2 , одержимо s·p2=s0·p20+s0·Δ p2+Δ s·p20. З врахуванням того, що в статичному режимі на підставі (9.2) p10=p20, одержимо V(s)·p2=p10·(V0+Fзм·s0)+(V0+Fзм·s0)·Δ p2+Fзм·Δ s·p10 (9.5)
Тоді рівняння матеріального балансу (9.2) із врахуванням (9.5) перепишемо у такий спосіб Детальніше розглянемо рівняння (9.3). Перейдемо до приростів в околі рівноважного стану, тоді з врахуванням складових елементів одержимо В рівноважному стані справедлива рівність Для отримання математичної моделі ВМ, із рівнянь (9.6) і (9.7) необхідно вилучити проміжну змінну Δ p2. Після перетворень одержимо де
Дослідження, проведені в [ ] свідчать, що Постійна часу залежить від параметрів ВМ і коливається в межах 5-25с. В [ ] запропонована математична модель мембранного приводу, яка враховує сухе тертя й специфіку протікання повітря в мембранну камеру. де G – витрата повітря через вхідний дросель камери; R – газова стала; Т – абсолютна температура повітря. Перше рівняння описує зміни тиску в камері виконавчого механізму в залежності від ходу затвору й параметрів мембранної камери. Друге рівняння характеризує рухливу систему. Воно враховує масу m частин, що рухаються, в'язке тертя з коефіцієнтом b, силу сухого тертя НТР, яка завжди спрямована проти швидкості прямування штока або вала, жорсткість пружини с, силу стиску пружини fпруж і неврівноважене зусилля на затворі від дії потоку N. Вхідним параметром цієї моделі служить тиск p2 у мембранній камері виконавчого механізму. Але він залежить від командного сигналу, що надходить через дросель, який з'єднює лінію передачі з камерою. Витрата повітря через дросель визначається не тільки його пропускною здатністю, але і характером процесу витікання повітря з лінії у камеру і назад. В залежності від того чи відбувається в камері набір або скидання тиску, суть формули, що визначає величину витрати повітря, змінюється. Причина цього полягає в наступному. По-перше, значення пропускної здатності дроселя при наборі й скиданні різні, тому що різні умови входу газу, а точніше, умови його проходження через дросель. При виході в камеру набір тиску супроводжується невеличким звуженням, а потім різким збільшенням прохідного перерізу; скидання відбувається при різкому звуженні і незначному розширенні проходу. По-друге, змінюється співвідношення тисків на вході й виході дроселя, оскільки при наборі тиск p1 - керуючий, а значення тиску p2- поточне у камері, а при скиданні керуючим буде тиск p2. З врахуванням особливостей проходження повітря через дросель система (9.8) доповнюється рівняннями:
Неврівноважене зусилля N у другому рівнянні системи (9.8) визначається конструкцією РО і напрямком подачі потоку в ньому. У односідельних РО при подачі потоку «під затвор" - це зусилля пропорційно ходу l, рахуючи від положення відкриття:
де Fc – площа сідла, см2; δ Pmax – максимальний перепад тиску на регулюючому органі. При подачі потоку «на затвор» зусилля на більшій частині ходу постійне, а наприкінці ходу (поблизу положення закриття) зростає в декілька разів, у закритому положенні його величина зменшується до початкової: Рівняння (9.8) – (9.10) складають модель пневматичного мембранно-пружинного ВМ без допоміжних блоків. У динаміці ця модель виявляє характерні особливості – інерційність, запізнення, схильність до автоколивань. Ці властивості визначаються в основному структурними особливостями моделі, наявністю визначених ланок і зв'язків між ними. Математична модель у такому вигляді є нелінійною і корисна для дослідження впливу всіх складових на характер руху вихідного елемента ВМ. Таке дослідження найпростіше виконати шляхом структурного моделювання, наприклад, у прикладному пакеті Matlab в інструментарії Simulink. Дана модель малопридатна для практичного використання при синтезі АСК. Для цієї мети доцільніше застосувати модель (9.8) приведену вище.
Рисунок 9.2 - Структурна схеми ВМ з позиціонером схему подану на рис.4.6, замінивши ВМ його динамічним еквівалентом, як це показано на рис.9.2. Передавальна функція ВМ з позиціонером з врахуванням того, що загальний коефіцієнт підсилення позиціонера (розімкнута система) Кп =К1 К2 К3 і буде такою
Оскільки коефіцієнт підсилення позиціонера достатньо великий (при зоні відпрацювання позиціонера δ =0, 05 і pж= 0, 25 МПа, складає Kn=57, 5, а при pж=0, 6 МПа -Kn =145), величинами TВМ/Kn і 1/Kn, можна знехтувати і тобто ВМ стає безінерційною ланкою. Враховуючи те, що всі світові виробники пневматичних приводів, комплектують їх позиціонерами, то при синтезі АСК виконавчий механізм можна заміщувати підсилювальними ланками.
9.2 Динамічні властивості ЕдВМ В автоматичних системах регулювання широке застосування в якості виконавчих механізмів знаходять електродвигуни з постійною частотою обертання вихідного вала. Виконавчий механізм постійної швидкості може знаходитися тільки в трьох станах: переміщення РО з постійною швидкістю ω , в стані нерухомості, переміщення РО в зворотній бік з постійною швидкістю. Без врахування часу розгону і гальмування статична характеристика виконавчого механізму описується рівнянням (9.12) і представлений на рисунку 9.3а. А статична характеристика виконавчого механізму постійної швидкості в комплекті з електромагнітним пусковим пристроєм на рисунку 9.3 б.
 Аналітично статична характеристика запишеться у вигляді системи наступних рівнянь: Аналітично статична характеристика запишеться у вигляді системи наступних рівнянь:
де μ – кут повороту вихідного вала ВМ; d m /dt — швидкість переміщення РО; U — сигнал на вході пускового пристрою.
Рисунок 9.3 – Статичні характеристики ВМ постійної швидкості (а), постійної швидкості в комплекті з електромагнітним пусковим пристроєм (б) і характер переміщення ВМ постійної швидкості при надходженні на його вхід серії постійних імпульсів (в) Як правило, функції пускових пристроїв використовують релейні електромагнітні апарати (магнітні пускачі, електромагнітні реле і т.п.). Електромагнітні апарати спрацьовують при більшому, а відпускання відбувається при меншому значенні вхідного сигналу. Статична характеристика виконавчого пристрою при цьому зображена на рисунку 9.3б. Зі статичної характеристики видно, що електродвигун вмикається при вхідному сигналі | U | > Dн/2, а вимикається при |U|< D н /2- D П, де D П — значення зони повернення чи зони неоднозначності релейного апарату. Статична характеристика виконавчого механізму постійної швидкості є істотно нелінійною. Її не можна лінеаризувати з достатньою для практичних розрахунків точністю при різних діапазонах зміни вхідного сигналу U. Проте такий виконавчий механізм може мати характеристики досить близькі до лінійних при релейно-імпульсній зміні вхідного сигналу. Подамо на вхід виконавчого механізму з постійною частотою обертання імпульси напруги U0 із періодом проходження Т і шпаровитістю
де Під час надходження імпульсу виконавчий механізм (ВМ) буде переміщувати РО з постійною швидкістю d m /dt=ω =tg a (рисунку 9.3в). Під час пауз ВМ буде нерухомий. При надходженні на ВМ серії імпульсів характер його переміщення буде мати вигляд, представлений на рисунку. 9.3в. Середня швидкість переміщення РО буде рівною:
або з врахуванням (6.5):
Перетворивши (9.18) за Лапласом, отримаємо:
де T 0 -час повного ходу електродвигунного ВМ. Таким чином, за каналом " шпаровитість проходження імпульсів – усереднене переміщення РО", виконавчий механізм постійної швидкості можна представити інтегруючою ланкою з передавальною функцією (9.19). Подібна характеристика ЕдВМ постійної швидкості вимагає врахування його динаміки при формуванні закону регулювання.Більшість імпульсних апаратних регуляторів та програмних мікропроцесорних регуляторів- контролерів (наприклад, контролери серії Реміконт та Ломіконт) формують алгоритми керування з врахуванням інтегральної складової ЕдВМ. Це характерно для приводів, які не мають позиціонерів. Позиціонери можуть реалізовуватись програмно з використанням структури мікропроцесорних регуляторів і контролерів, або апаратно, як додаткові блоки приводів. Практично всі ЕдВМ фірм Fisher, Honeywell, Samson та інших комплектуються електронними позиціонерами.Деякі виробники апаратних регуляторів, наприклад ПП " Мікрол", розробляє алгоритми керування, які дозволяють реалізувати програмні позиціонери при імпульсному керуванні ЕдВМ. В обох випадках закон керування в контурі АСК формується без врахування динаміки приводу. Розглянемо детальніше роботу ЕдВМ сумісно з позиціонером у режимі імпульсного керування. Якщо виконавчий механізм із пусковим пристроєм охопити зворотнім зв'язком (рисунок 9.4а) у виді підсилювальної ланки з передавальною функцією Wз.з(р) = kз.з., то при релейно-імпульсному перетворювачі (РІП) з ВМ постійної швидкості, можна реалізувати закон П- регулятора позиції вихідного вала. При надходженні від регулюючого блока керуючого сигналу | e | ³ D н /2, ВМ увімкнеться й буде переміщати РО з постійною швидкістю ω у бік ліквідації неузгодженості з e. Переміщення m регулюючого органа через канал зворотнього зв'язку передається у вигляді сигналу зворотнього зв'язку z зменшуючи результуючий сигнал | s | = e - z, що впливає на РІП.
Рисунок 9.4- Структурна схема імпульсного позиціонера ВМ постійної швидкості (а) і його усереднена розгінна характеристика (б)
При | s | < D н /2 - D П виконавчий механізм вимкнеться. Таким чином, при кожній зміні | e | > D н /2 ВМ буде переміщати РО, ліквідуючи з точністю | s | < D н /2 відхилення від керуючого сигналу e. Оскільки сигнал зворотного зв'язку z = kз.з. m,, то в усталеному режимі s = e - k.з.з. m < D н /2 (9.20) Так як зона нечутливості РІП D н має невелике значення, то вираз (9.20) приблизно можна записати у виді e = k.з.з. m = 0. Тому передавальна функція імпульсного регулятора -позиціонера з ВМ сталої швидкості набуває вигляду: WВМ-П (p) = M(p)/E(p) = 1/ kз.з. (9.21)
Таким чином, імпульсний регулятор-позиціонер з ВМ постійної швидкості зі структурою схемою, приведеної на рисунок 9.4а, приблизно реалізує безінерційну ланку з коефіцієнтом передачі 1/ kз.з.. Представлену вище структуру може проаналізувати і в межах лінійноі теорії керування (рис.9.5). При порівняно невеликій зоні нечутливості РІП розглядають як лінеаризований підсилювач із k у > > 1. Подібна лінеаризація означає, що вихідний сигнал блока розраховується як середнє значення за період проходження імпульсів вихідної напруги. При однополярних імпульсах з амплітудою U 0 середня вихідна напруга U = U0 g.
Рисунок 9.5 – Структурна схема лінеаризованого електродвигунного приводу з позиціонером При лінеаризованому опису роботи ВМ із позиціонером, у яких виконавчий механізм одержує сигнали керування від РІП, передавальна функція ВМ має вигляд Якщо давач положення не використовується, тоді в структурі регулятора передбачається обчислювач прогнозного положення вала ВМ, який інтегрує вихідні імпульси РІП і при заданому часі повного ходу ЕдВМ дозволяє достатньо точно обчислити положення вихідного вала. В деяких приводах, наприклад HRA 4000, який ми розглядали вище, РІП із пусковим пристроєм заміщений на частотний перетворювач, який пропорційно величині сигналу керування змінює частоту обертання двигуна.Таким чином реалізується частотно-регульований привод. Таким чином, застосування електронних позиціонерів з ЕдВМ, дозволяє розглядати дані приводи в динаміці, при суттєвій нелінійності пускового пристрою з ВМ, як безінерційні ланки.
ПЕРЕЛІК ВИКОРИСТАНИХ ДЖЕРЕЛ 1.Иткина Д.М. Исполнительные устройства систем управления в химической и нефтехимической промышленности.-М.: Химия, 1984. –232с. 2. Котелевский Ю.М. Современные конструкции трубопроводной арматуры для нефти и газа. Справочное пособие.-М.: Недра, 1976.-494с. 3. Варгафтик Н.Б. Справочник по теплофизическим свойствам газов и жидкостей.-М.: Физматгиз, 1967.-706с. 4. Товарние нефтепродукты, их свойства и применение/Справочник под ред.Н.Г.Пучкова.-М.: Химия, 1971.-414с. 5. http//www.siemens.com.ua 6. http: //www.emersonprocess.com/Russia 7. http: //iac.honeywell.com 8.http: //www.zeim.ru 9.Бормин А., Тошлицкий М. Преобразователи частоты фирмы Siemens/ Современние технологии автоматизации: Сб.статей.-М.: Изд-во < < СТА-Пресс> >, 2000.-вип.4, -12с 10. Горбійчук М.І. Моделювання об'єктів і систем керування в нафтовій і газовій промисловості.Навч.посібник.-Івано-Франківськ: Факел.-1999.-630с. 11.Идельчик И.Е. Справочник по гидравлическим сопротивлениям.-М.-Л.: Госэнергоиздат, 1960.-464с.
ДОДАТКИ
ДОДАТОК А Програмний продукт для розрахунку дросельних регулюючих органів
Програмний продукт є прикладною інженерно – розрахунковою програмою, яка грунтується на методиці приведеній в розділі 3, і стосується розрахунку дросельних регулюючих органів різних типів, установлених на потоках рідини, газу чи паропроводах. Структура програми приведена на рис. А.1.
Рисунок А.1- Структура програми розрахунку РО Програма містить стартовий файл, модулі вводу-виводу даних, розроблених в EXCEL, та серію розрахункових блоків для різних конструктивних тиів РО та дросельованих середовищ, розроблених в MATHCAD. Всі модулі зв'язані між собою через гіперпосилання та інтегровані компоненти об'єктних зв'язків передачі даних. Така структура програми дозволяє доповнювати та розширювати структуру за рахунок нових розрахункових модулів для інших типів РО. Старт-файл представляє собою EXCEL- книгу(рис.А.2), в якій на окремих сторінках сформована наступна інформація: заставка з вибором напрямку розрахунку (рідина, газ чи пара) та конструктивного типу РО (двосідельний, односідельний, засліночний тощо). Вибір напрямку дозволяє автоматично встановити об'єктний зв'язок через гіперпосилання з відповідним розрахунковим модулем та блоком вводу вихідних даних. На інших сторінках зібрана довідкова інформація, необхідна для подальших розрахунків ( загальна довідка про методику розрахунку, дані про шорсткість трубопроводів та коефіцієнти місцевих опорів, теплотехнічні параметри рідин, газів та пари тощо). Приклад довідки " Параметри газів" приведений на рис. А.3.
Рисунок А.3- Довідка для вибору термодинамічних параметрів газів Модулі вводу містять розроблені форми з параметрами для вводу інформації й мають різні шаблони в залежності від типу середовища, яке дроселює РО. EXCEL-форма є зручною для занесення даних і має значну кількість гіперпосилань для отримання необхідних доівдкови матеріалів. Сформована база даних передається в MATHCAD –модуль за допомогою інтеграційних компонентів останнього( рис.А.4).
Рисунок А.4-Інтегрування модуля вводу в розрахунковий блок на MATHCAD Програмний модуль виводу теж має спільну форму виводу, яка інтегрована в MATHCAD. Розраховані параметри РО передаються в даний шаблон виводу. Розрахункові модулі для різних типів РО і одного середовища подібні, але відрізняються блоками параметричних рядів РО та деякими параметрами, які є характерними для них. З іншими особливостями програмного продукта можна ознайомитися в конкретних прикладах розрахунку регулюючих органів.
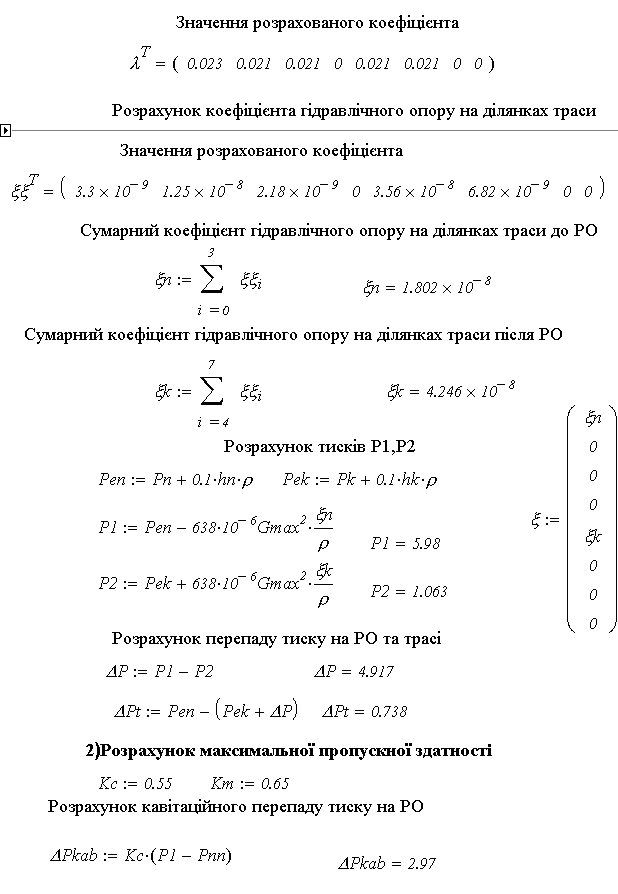
Розрахунковий модуль для РО на паропроводі складається з таких програмних блоків: вводу і підготовка даних (ввід здійснюється через інтегрований компонент зв'язку); гідравлічного розрахунку траси; розрахунку максимальної пропускної здатності; вибору умовної пропускної здатності та умовного проходу; виводу даних в форму подану на рис А.6.
А.2-Програма розрахунку РО на газовій лінії
* Примітка. Частина програмних блоків згорнута для зменшення розміру тексту програми. Ці блоки мають повну аналогію з приведеними вище текстами.
А.3 Програма розрахунку РО на продуктопроводі з рідиною
Додаток Б. Технічна характеристика кліткових регулюючих клапанів з пневмоприводом виробників Росії Таблиця Б.1- Коротка характеристика клапанів РК, ПОУ, КМР
Для малих витрат | ||||||||||||||||||||
| ПОУ-7М | 10 15 20 25 | до 16 | 0, 006-1, 6 0, 006-2, 5 0.006-6, 3 0, 006-12, 0 | -40-+225 | -40-+70 -50-+70 -60-+70 | |||||||||||||||
| ПОУ-8М | 10 15 20 25 | до 16 | 0, 006-1, 6 0, 006-2, 5 0.006-6, 3 0, 006-12, 0 | -40-+225 | -40-+70 -50-+70 -60-+70 | |||||||||||||||
| ПОУ-9М | 10 15 20 25 | до 16 | 0, 006-1, 6 0, 006-2, 5 0.006-6, 3 0, 006-12, 0 | -40-+225 -90-+450 | -40-+70 -50-+70 -60-+70 | |||||||||||||||
| КМР | 20 25 32 40 50 | 1, 6; 2, 5; 4, 0 | 0.006-6, 3 0, 006-12, 0 0, 16-16, 0 0, 16-16, 0 0, 16-16, 0 | -40-+225 -90-+450 | -40-+70 -50-+70 -60-+70 | |||||||||||||||
|
Для середніх витрат | ||||||||||||||||||||
| РК 101, ПОУ 32 | 25 50 80 100 150 | 6, 3 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 | |||||||||||||||
| РК 102, ПОУ 51 | 25 50 80 100 150 | 6, 3 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 | |||||||||||||||
| РК 201 | 25 50 80 100 150 200 | 1, 6 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 | |||||||||||||||
продовження табл.Б.1
| Тип | Dy , мм | Py, МПа | KVy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| РК 202 | 25 50 80 100 150 200 | 1, 6 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| РК 301 | 25 50 80 100 150 200 | 2, 5 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 302 | 25 50 80 100 150 200 | 2, 5 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| РК 302 | 25 50 80 100 150 200 | 2, 5 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| РК 401 | 25 50 80 100 150 200 | 4, 0 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| РК 402 | 25 50 80 100 150 200 | 4, 0 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
продовження табл.Б.1
| Тип | Dy , мм | Py, МПа | KVy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| РК 501 | 50 80 100 150 | 10, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| РК 502 | 50 80 100 150 | 10, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| РК 601 | 50 80 100 150 | 16, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| РК 602 | 50 80 100 150 | 16, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
Таблиця Б.2- Коротка характеристика клапанів ЗРК(запірно-регулюючих)
| Тип | Dy , мм | Py, мм | Kvy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| ЗРК 101 | 25 50 80 100 150 | 6, 3 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 102 | 25 50 80 100 150 | 6, 3 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
продовження табл.Б.2
| Тип | Dy , мм | Py, мм | Kvy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| ЗРК 201 | 25 50 80 100 150 200 | 1, 6 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 202 | 25 50 80 100 150 200 | 1, 6 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 301 | 25 50 80 100 150 200 | 2, 5 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 302 | 25 50 80 100 150 200 | 2, 5 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 401 | 25 50 80 100 150 200 | 4, 0 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +225 | -40 - +70 -50 - +70 -60 - +70 |
продовження табл.Б.2
| Тип | Dy , мм | Py, мм | Kvy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| ЗРК 402 | 25 50 80 100 150 200 | 4, 0 | 2, 5 – 16, 0 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 200, 0 –630, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| 3РК 501 | 50 80 100 150 | 10, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 502 | 50 80 100 150 | 10, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 601 | 50 80 100 150 | 16, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 –250, 0 100, 0 – 500, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗРК 602 | 50 80 100 150 | 16, 0 | 10, 0-63, 0 25, 0 –160, 0 40, 0 -250, 0 100, 0 – 500, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
Таблиця Б.3- Коротка характеристика клапанів ЗК(запірних)
| Тип | Dy мм | Py мм | Kvy min-max м3/год | t° середо- вища °С | t° навкол. повітря° С |
| ЗК 101 | 25 50 80 100 150 | 6, 3 | 19, 2 75, 6 192, 0 300, 0 600, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
продовження табл.Б.3
| Тип | Dy , мм | Py, мм | Kvy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| ЗК 102 | 25 50 80 100 150 | 6, 3 | 19, 2 75, 6 192, 0 300, 0 600, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 201 | 25 50 80 100 150 200 | 1, 6 | 19, 2 75, 6 192, 0 300, 0 600, 0 756, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 202 | 25 50 80 100 150 200 | 1, 6 | 19, 2 75, 6 192, 0 300, 0 600, 0 756, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 301 | 25 50 80 100 150 200 | 2, 5 | 19, 2 75, 6 192, 0 300, 0 600, 0 756, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 302 | 25 50 80 100 150 200 | 2, 5 | 19, 2 75, 6 192, 0 300, 0 600, 0 756, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 401 | 25 50 80 100 150 200 | 4, 0 | 19, 2 75, 6 192, 0 300, 0 600, 0 756, 0 | -40 - +420 -90 - +225 | -40 - +70 -50 - +70 -60 - +70 |
продовження табл.Б.3
| Тип | Dy , мм | Py, мм | Kvy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| ЗК 402 | 25 50 80 100 150 200 | 4, 0 | 19, 2 75, 6 192, 0 300, 0 600, 0 756, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| 3К 501 | 50 80 100 150 | 10, 0 | 75, 6 192, 0 300, 0 600, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 502 | 50 80 100 150 | 10, 0 | 75, 6 192, 0 300, 0 600, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 601 | 50 80 100 150 | 16, 0 | 75, 6 192, 0 300, 0 600, 0 | -40 - +225 | -40 - +70 -50 - +70 -60 - +70 |
| ЗК 602 | 50 80 100 150 | 16, 0 | 75, 6 192, 0 300, 0 600, 0 | -40 - +420 -90 - +420 | -40 - +70 -50 - +70 -60 - +70 |
Таблиця Б.4- Коротка характеристика спеціальних клапанів
| Тип | Dy , мм | P, мм | Kvy min-max, м3/год | t° середо- вища, °С | t° навкол. повітря, ° С |
| УИФ (футеро-вані) | 25 50 80 | 4, 0 | 0, 25-12, 0 12; 20; 32 32; 50; 63; 80 | -50-+150 | -50-+60 |
| МИУФ (фтороплас-тові) | 10 15 25 32 | 1, 0 | 0, 1-1, 6 0, 1-2, 5 1, 6-8, 0 2, 5-16, 0 | -50-+100 | -50-+60 -40-+60 |
| КШС (шланговий спеціальний) | 6 10 15 20 25 32 40 50 80 | 1, 0 2, 5 | 1, 2 4 10 18 32 50 80 125 320 | -40-+80 | -40-+60 |
Додаток В.Основні технічні характеристики приводів
МЭО, МЭМ
| Умовне позначення механізмів, виконання | Потужність споживання | Тип двигуна і пускача |
| МЭО-К-84 | ||
| МЭО-4000/63-0, 25К-84 МЭО-4000/160-0, 63К-84 | 700В· А | АИР-56В4 ПБР-3А, ФЦ-0610 |
| МЭО-10000/63-0, 25К-84 МЭО-10000/160-0, 63К-84 | 900В· А | АИР-71В4 ПБР-3А, ФЦ-0610 |
| МЭО-87 | ||
| МЭО-40/10-0, 25-87 МЭО-40/25-0, 63-87 МЭО-100/10-0, 25-87 МЭО-100/63-0, 63-87 МЭО-250/63-0, 25-87 МЭО-250/160-0, 63-87 | 260Вт | ДСТР-135-1, 8-136 ФЦ-0620, ФЦ-0610, ПБР-3А |
| МЭО-100/10-0, 25-87 МЭО-100/25-0, 63-87 МЭО-250/10-0, 25-87 МЭО-250/63-0, 63-87 | 490Вт | ДСТР-135-4, 5-136 ФЦ-0620, ФЦ-0610, ПБР-3А |
| МЭО-40/10-0, 25У-87 МЭО-40/25-0, 63У-87Б МЭО-100/25-0, 25У-87Б МЭО-100/63-0, 63У-87Б МЭО-250/63-0, 25У-87Б МЭО-250/160-0, 63У-87Б | 260Вт | ДСТР-135-1, 8-136 ФЦ-0620, ФЦ-0610, ПБР-3А |
| МЭО-100/10-0, 25У-87Б МЭО-100/25-0, 63У-87Б МЭО-250/10-0, 25У-87Б МЭО-250/63-0, 63У-87Б | 490Вт | ДСТР-135-4, 5-136 ФЦ-0620, ФЦ-0610, ПБР-3А |
| МЭО-90 | ||
| МЭО-16/63-0, 25-90 МЭО-40/63-0, 25-90 | 50Вт | ДСР-110-1, 0-60 ПБР-2М, ПБР-2М1 |
| МЭО-91 | ||
| МЭО-40/10-0, 25-91 МЭО-40/25-0, 63-91 МЭО-100/10-0, 25-91 МЭО-100/63-0, 63-91 МЭО-250/63-0, 25-91 МЭО-250/160-0, 63-91 | 300Вт | ДСОР-135-1, 8-136 ПБР-2М, ПБР-2М1 |
Таблиця В.1- Номенклатура приводів МЭО
| Умовне позначення механізмів, виконання | Потужність споживання | Тип двигуна і пускача |
| МЭО-92К | ||
| МЭО-250/10-0, 25-92К МЭО-250/25-0, 63-92К МЭО-630/25-0, 25-92К МЭО-630/63-0, 63-92К МЭО-630/63-0, 25-92К МЭО-630/160-0, 63-92К МЭО-250/10-0, 25У-92КБ МЭО-250/25-0, 63У-92КБ МЭО-630/25-0, 25У-92КБ МЭО-630/63-0, 63У-92КБ МЭО-630/63-0, 25У-92КБ МЭО-630/160-0, 63У-92КБ | 200Вт | АИР-56А4 ПБР-3А, ФЦ-0610 |
| МЭО-630/10-0, 25-92К МЭО-630/25-0, 63-92К МЭО-1600/25-0, 25-92К МЭО-1600/63-0, 63-92К | 490Вт | АИР-56В4 ПБР-3А, ФЦ-0610 |
| МЭО-1600/63-0, 25-92К МЭО-1600/160-0, 63-92К | 250Вт | АИР-56А4 ПБР-3А, ФЦ-0610 |
| МЭО-93 | ||
| МЭО-16/10-0, 25-93 МЭО-16/25-0, 63-93 МЭО-40/25-0, 25-93 МЭО-40/63-0, 63-93 | 110Вт | ДСОР-110-1, 0-136 ПБР-2М, ПБР-2М1 |
| МЭО-94 | ||
| МЭО-6, 3/10-0, 25-94 МЭО-6, 3/25-0, 63-94 МЭО-16/25-0, 25-94 МЭО-16/63-0, 63-94 МЭО-16/63-0, 25-94 МЭО-16/160-0, 63-94 МЭО-40/63-0, 25-94 МЭО-6, 3/25-0, 25-94М МЭО-16/63-0, 63-94М МЭО-16/160-0, 63-94М МЭО-40/160-0, 63-94М | 70Вт | ДСОР-80-0, 25-136 ПБР-2М |
| МЭО-16/25-0, 63-94М МЭО-40/63-0, 63-94М | 110Вт | ДСОР-110-1, 0-136 ПБР-2М |
| МЭО-40/160-0, 63-94 | 70Вт | ДСОР-80-0, 25-136 ПБР-2М |
продовження табл.В.1
Таблиця В.2- Номенклатура приводів МЭОФ (фланцеві)
| Умовне позначення механізмів, виконання | Потужність споживання | Тип двигуна і пускача |
| МЭОФ-6, 3/10-0, 25-97 МЭОФ-6, 3/10-0, 25-97 МЭОФ-40/63-0, 25-97 | 70Вт | ДСОР-80-0, 25-136 ПБР-2М |
| МЭОФ-16/10-0, 25-96 МЭОФ-40/25-0, 25-96 | 110Вт | ДСОР-110-1, 0-136 ПБР-2М, ПБР-2М1 |
| МЭОФ-32/15-0, 25-96К МЭОФ-40/25-0, 25-96К | 110Вт | ДСОР-110-1, 3-136 ПБР-3 |
| МЭОФ-6, 3/25-0, 63-97 МЭОФ-16/63-0, 63-97 МЭОФ-40/160-0, 63-97 | 70Вт | ДСОР-80-0, 25-136 ПБР-2М |
| МЭОФ-16/25-0, 63-96 МЭОФ-40/63-0, 63-96 | МЭОФ | 12/25 |
| МЭОФ-32/37-0, 63-96К МЭОФ-40/63-0, 63-9К | 110Вт | ДСОР-110-1, 3-136 ПБР-3 |
| МЭОФ-40/10-0, 25-97К МЭОФ-100/25-0, 25-97К МЭОФ-250/63-0, 25-97К | 260Вт | 2ДСТР-135-1, 8-136 ФЦ-0620, ФЦ-0610, ПБР-3 |
| МЭОФ-100/10-0, 25-97К МЭОФ-250/25-0, 25-97К | 430Вт | 2ДСТР-135-4, 5-136 ФЦ-0620, ПБР-3 |
| МЭОФ-100/25-0, 25-97 МЭОФ-250/63-0, 25-97К | 300Вт | ДСОР-135-1, 8-136 ПБР-2М, ПБР-2М1 |
| МЭОФ-40/25-0, 63-97К МЭОФ-100/63-0, 63-97К МЭОФ-250/160-0, 63-97К | 260Вт | 2ДСТР-135-1, 8-136 ФЦ-0620, ФЦ-0610, ПБР-3 |
| МЭОФ-100/25-0, 63-97К МЭОФ-250/63-0, 63-97К | 430Вт | 2ДСТР-135-4, 5-136 ФЦ-0620, ПБР-3 |
| МЭОФ-630/10-0, 25-96К МЭОФ-1000/15-0, 25-96К МЭОФ-1600/25-0, 25-96К МЭОФ-2500/63-0, 25-96К МЭОФ-630/25-0, 63-96К МЭОФ-1000/37-0, 63-96К МЭОФ-1600/63-0, 63-96К МЭОФ-2500/160-0, 63-96К | 400Вт | АИР-56В4 ПБР-3А, ФЦ-0610 |
| МЭОФ-3, 2/6, 3-0, 25М-98 МЭОФ-1, 6/4-0, 25M-98 МЭОФ-4/10-0, 25M-98 МЭОФ-6, 3/12, 5-0, 25M-98 МЭОФ-12/25-0, 25M-98 МЭОФ-16/30-0, 25M-98 | 70Вт | ДСОР-80-0, 25-136 ПБР-2М |
продовження табл.В.2
| Умовне позначення механізмів, виконання | Потужність споживання | Тип двигуна і пускача |
| МЭОФ-320/10-0, 25-97К МЭОФ-630/15-0, 25-97К МЭОФ-1000/25-0, 25-97К МЭОФ-1000/63-0, 25-97К | 200Вт | АИР-56А4 ПБР-3А |
| МЭОФ-4000/25-0, 25-98 МЭОФ-4000/63-0, 25-98 | 550Вт 300Вт | АИР-56А4 ПБР-3А |
| МЭОФ-40/10-0, 25-98 | 170Вт | ДСТР-110-1, 6-136 ФЦ-0620, ФЦ-0610, ПБР-3 |
Таблиця В.3-Механізм виконавчі електричні багатооборотні
| Умовне позначення механізмів, виконання | Потужність споживання | Тип двигуна і пускача |
| МЭМ-6, 3/400-63-97 МЭМ-6, 3/63-10M-97 | 110Вт | ДСТР-110-0, 6-136 ФЦ-0620 |
| МЭМ-16/400-63-97 МЭМ-16/63-10M-97 | 135Вт | ДСТР-110-0, 6-136 ФЦ-0620 |
 Схема формування умовного шифру ВМ:
Схема формування умовного шифру ВМ:
Последнее изменение этой страницы: 2019-04-09; Просмотров: 436; Нарушение авторского права страницы
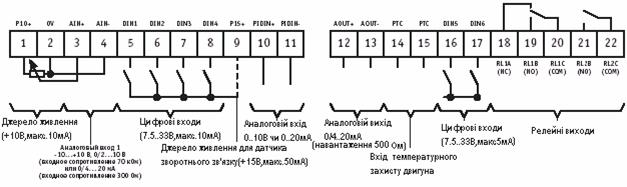 Рисунок 8.8-Схема підключення ланцюгів керування перетворювача MIKROMASTER VECTOR
Рисунок 8.8-Схема підключення ланцюгів керування перетворювача MIKROMASTER VECTOR

 ,
, 
 ,
,  ,
,  , (9.1)
, (9.1) , (9.2)
, (9.2) , (9.3)
, (9.3) . (9.4)
. (9.4) . (9.6)
. (9.6) . (9.7)
. (9.7)
 ,
,  - передавальна функція по каналу " s - p1 ";
- передавальна функція по каналу " s - p1 ";  -передавальна функція по каналу " s - δ p ".
-передавальна функція по каналу " s - δ p ".

 ;
;  ;
;  ;
;  ;
;  ;
;  .
. і
і  є незначними і ними можна знехтувати, тоді
є незначними і ними можна знехтувати, тоді . (9.8)
. (9.8)  (9.8)
(9.8) (9.9)
(9.9) (9.10)
(9.10) ,
,  при l< 0.9 і l = 1;
при l< 0.9 і l = 1;  при
при  де n – кратність пікового зростання зусилля.
де n – кратність пікового зростання зусилля. В АСК виконавчі механізми використовуються, як правило, із позиціонером. Розглянемо властивості ВМ у такій компоновці. Модернізуємо
В АСК виконавчі механізми використовуються, як правило, із позиціонером. Розглянемо властивості ВМ у такій компоновці. Модернізуємо ,
,  .
.  , (9.11)
, (9.11) (9.12)
(9.12)
 — зона нечутливості пускового пристрою;
— зона нечутливості пускового пристрою; 
 (9.16)
(9.16) - період проходження імпульсів;
- період проходження імпульсів;  тривалість імпульсів;
тривалість імпульсів;  — тривалість пауз.
— тривалість пауз. (9.17)
(9.17) (9.18)
(9.18) , (9.19)
, (9.19)

 . Такий вигляд функції зумовлений тим, що в імпульсному сигналі із середнім за період Т напругою U = g U0 інформаційної складової є тільки величина g = U/ U 0. Уводячи коефіцієнт 1/U0 у передавальну функцію ВМ, можна розрахувати властивості системи керування. як структури, побудованої з лінійних блоків.
. Такий вигляд функції зумовлений тим, що в імпульсному сигналі із середнім за період Т напругою U = g U0 інформаційної складової є тільки величина g = U/ U 0. Уводячи коефіцієнт 1/U0 у передавальну функцію ВМ, можна розрахувати властивості системи керування. як структури, побудованої з лінійних блоків.
 Рисунок А.2- Загальний вигляд вікна в книзі Старт-файла
Рисунок А.2- Загальний вигляд вікна в книзі Старт-файла 


 А.1 Приклад розрахунку РО на паропроводі
А.1 Приклад розрахунку РО на паропроводі