
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Построение графика переходного процесса
Построение графика переходного процесса (рис.14) в системе по средствам программной среды MathCAD. Для этого требуется решить систему (40). Для решения преобразуем структуру системы к виду, показанному на рис.13 [1].
Рис.15. Преобразованная структура системы Новой структуре соответствует система уравнений [1]:
Первое уравнение является дифференциальным, второе – алгебраическим, так как содержит производные, находимые из первого уравнения. Для построения графика переходного процесса (рис. 14) необходимо решить дифференциальное уравнение: При численном решении дифференциального уравнения n-го порядка преобразуем в систему из n уравнений первого порядка [1]. z(t)=z1(t), z’(t)=z2(t). (42) В результате подстановки выражения (42) в (40) можно записать систему уравнений следующего вида:
Решив систему (43) определим: y(t) = 3.58z1(t) (44) Для решение системы в MathCAD необходимо указать следующие параметры: Исходное уравнение:
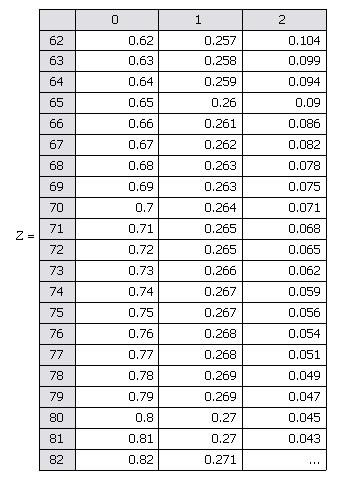
Решение дифференциального уравнения методом Рунге-Кутта: n – 2000 число точек решения; tk = 200 конечное время решения; D – исходное уравнение. Конечный результат для вычисления переходного процесса. Представим найденные значение в таблице 3. Расчет точек для графика переходного процесса представим в таблице 4.
Таблица 3 Расчет точек переходного процесса
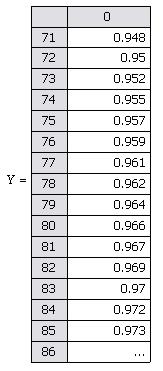
Таблица 4 Расчет точек для графика переходного процесса
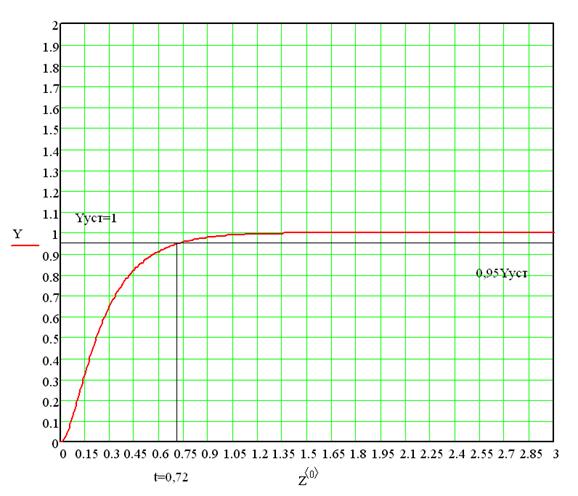
Рис. 16. График переходного процесса системы 2.2.3 Оценка качества исследуемой системы По графику переходного процесса и по логарифмической характеристики системы производим оценку качества исследуемой системы, приведенной к устойчивости. Для оценки пользуемся следующими показателями: 1. Вид переходного процесса 2. Длительность переходного процесса 3. Величина перерегулирования 4. Запас устойчивости системы по фазе 5. Запас устойчивости системы по амплитуде Согласно графику переходного процесса (рис.14) переходный процесс имеет плавный апериодический характер. Длительность переходного процесса определим как время, прошедшие от начала переходного процесса (t=0) до момента установления величины выходного сигнала, отличающейся не более чем на 5% от установившегося значения. По графику (рис.14) переходного процесса определяем его длительность: tпп = 0,72 с. Величина перерегулирования определяется по графику переходного процесса и так как в системе отсутствуют колебания, то величина перерегулирования будет равна нулю. Запасы устойчивости системы, определяемые по логарифмическим характеристикам, характеризуют степень устойчивости системы. Запас устойчивости системы по фазе определяется через фазовый угол системы на частоте среза ωс:
где: φз =1800 – 1400 = 400 (49) Что бы система обладала достаточным качеством, запас устойчивости по фазе должен лежать в пределах 20˚- 50˚. Запас устойчивости по амплитуде определяется по графику на чертеже КР-2068.998-26-06-00.00.000.Д1 как ордината ЛАХ на частоте фазового угла, равного π: Для обеспечения перерегулирования в системе не более 20 % запас по амплитуде должен быть не менее -15дБ. Даная система удовлетворяет этому требованию. Оценка точности системы Оцениваются статическая и вынужденная ошибки системы. Для этого необходимо определить передаточную функцию замкнутой системы по ошибке [1]: Фх(р) = 1- Ф(р) = Для уравнения (52) в общем виде: Фх(р) = где: Представим Фх(р) в виде бесконечного степенного ряда [1]: Фх(р) = S0+ S1·p+S2·p2+…, (54) где коэффициенты ошибок Sn определяются по формуле [1]: Sn = Определим коэффициенты ошибок: S0 = S1= S2 = S2= Находим выражение вынужденной ошибки системы: ∆x(t) = S0·xвх(t) + S1 где: S0-коэффициент статической ошибки, S1-коэффициент скоростной ошибки, xвх(t)-заданное значение выходного параметра системы. ∆x(t) = 0,05 При xвх(t) = 1 Dx(t) = 0 – статическая ошибка системы отсутствует (т.к. система астатическая)[1]; При xвх(t) = t Dx(t) =0,05– скоростная ошибка; |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 342; Нарушение авторского права страницы


 (40)
(40) (41)
(41)
 (43)
(43) (45)
(45) (46)
(46) - начальные условия.
- начальные условия. (47)
(47)
 (48)
(48) - фазовый сдвиг, определяем по графику на чертеже КР-2068.998-26-06-00.00.000.Д1:
- фазовый сдвиг, определяем по графику на чертеже КР-2068.998-26-06-00.00.000.Д1: (50)
(50) (51)
(51) =
=  (52)
(52) , (53)
, (53) = 0;
= 0;  = 1;
= 1;  = Tоб = 0,05;
= Tоб = 0,05;  =0 ;
=0 ;  = k = 3,58;
= k = 3,58;  = 1;
= 1;  = Tоб = 0,05;.
= Tоб = 0,05;. (
(  -
-  ) (55)
) (55) = 0; (56)
= 0; (56) ) (57)
) (57) (1- 0) = 0,05 (58)
(1- 0) = 0,05 (58) - (S1·
- (S1·  (0,05- (0,05·1+0))= 0 (60)
(0,05- (0,05·1+0))= 0 (60) (61)
(61) (62)
(62)