|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Особенности различных типов архитектур биусСтр 1 из 9Следующая ⇒
Особенности различных типов архитектур биус Элементы системы. Бортовая информационно-управляющая система (БИУС) транспортного средства (ТС) – это комплекс средств для автоматической оценки состояния автомобиля и его агрегатов, для оценки параметров движения, для информирования водителя об этих состояниях и выработки управляющий воздействий на исполнительные механизмы автомобиля в процессе выполнения различных функциональных задач. Принцип работы БИУС заключается в следующем. Сигналы с датчиков, установленных на ТС, поступают в вычислитель, который формирует заключение и выдает его в виде информации о состоянии контролируемого объекта водителю и автоматическим исполнительным системам. По своей структуре БИУС должна состоять из следующих элементов: 1) комплекта датчиков, воспроизводящих диагностическую информацию от объекта диагностирования; 2) преобразователей, принимающих сигналы от датчиков и преобразующих их в вид, удобный для дальнейшей обработки; 3) устройств обработки информации, проводящих оценку полученных данных диагностирования по заданной программе и выдающих конечные результаты в виде электронных сигналов; 4) устройств выдачи информации, фиксирующих результаты диагностирования на носителе информации. Для оценки состояния и поведения транспортного комплекса используется информация, получаемая датчиков, как правило, аналоговых и импульсных типов, имеющих различные диапазоны измерения. Многие эти датчики имеют нелинейную характеристику. Используются также дискретные датчики, чаще всего релейного типа. Для подключения датчиков к микропроцессорам/контроллерам, выполняющим сбор и обработку информации с датчиков , а так же формирующие информационные сообщения и управляющие воздействия на исполнительные механизмы, необходимо выполнить обработку сигналов. К обработке сигнала относится нормирование сигнала, т.е. приведение его к определенному значению, фильтрация, линеаризация, аналогово-цифровое преобразование и другие виды обработки. Из анализа возможных схем построения систем датчиков, преобразователей, вычислителей БИУС можно сделать вывод о целесообразности построения и использования мехатронных модулей (ММ). Каждый ММ выполняется в виде законченного модуля, содержащего непосредственно первичный преобразователь (датчик), устройство преобразования сигналов и вычислитель. Для управления исполнительными устройствами так же создается модуль, в состав которого входит вычислитель, усилитель-преобразователь и исполнительный механизм. Структурные схемы модулей показаны на рисунке 1.1. каждый модуль выполняется в виде специализированного контроллера, содержащего вычислительное устройство и преобразователь. Рисунок 1.1 – Мехатронные модули.
При использовании дискретных датчиков не требуется сложных преобразований, и поэтому, рационально их подключить к ММ, который физически расположен ближе к дискретному датчику. Это потребует использование контроллера с несколькими входами. В общем случае все ММ автомобиля по функциональному назначению могут быть отнесены к следующим основным группам: - системы управления двигателем; - системы управления трансмиссией и агрегатами; - системы управления ходовой частью, в том числе и тормозными системами; - системы управления оборудованием кабины; - системы диагностики/самодиагностики узлов агрегатов автомобиля. Использование концепции ММ позволяет в значительной степени абстрагироваться в процессе проектирования сложного объекта (БИУС) от исполнительной и информационных частей (считая, что они компонуются из готовых блоков – мехатронных модулей), а сосредоточить основное внимание на разработке компьютерного управления.
Структурная схема БИУС В результате проведенного анализа структурно-алгоритмического построения систем диагностирования транспортных средств предлагается аппаратная реализация автоматизированной диагностической системы в виде информационно-управляющей системы транспортного средства (ТС). Для оценки состояния и поведения ТС используется информация, получаемая со следующих датчиков, расположенных на машине: - датчики давления измеряют давление масла в КПП, ДВС, гидросистеме, пневмосистеме; - датчики температуры для измерения температуры охлаждающей жидкости ДВС, масла в ДВС, охлаждающей жидкости в компрессоре, масла в гидросистеме. Перечисленные датчики являются аналоговыми и имеют различные диапазоны измерения. Многие датчики имеют нелинейную характеристику. Используются также дискретные датчики, работающие в качестве сигнализаторов, например, сигнализатор критической температуры охлаждающей жидкости, аварийного давления масла и другие, концевые выключатели главного фрикциона, горного тормоза, вентилятора. Еще один тип датчиков – импульсные датчики, формирующие последовательность импульсов, например для контроля пройденного пути. В качестве информационно-управляющей системы используется бортовой компьютер (вычислитель), выполняющий сбор и обработку информации с датчиков, а также формирующий информационные сообщения и управляющие воздействия на исполнительные механизмы. Для подключения датчиков к вычислителю необходимо выполнить обработку сигналов. К обработке сигналов относятся нормирование сигнала (усиление), т.е. приведение его к определенному значению, фильтрация, линеаризация, аналого-цифровое преобразование и другие виды обработки. Структурная схема информационно-управляющей системы приведена на рисунке 1.3.1.
Рисунок 1.3.1 – Информационно-управляющая система Приведенная система обладает существенным недостатком. Вычислитель оказывается слишком перегруженным, т.к. очень много времени затрачивается на формирование информационных сообщений, что может привести к потере информации с датчиков в критических ситуациях. Поэтому предлагается разделить функции сбора и обработки информации с датчиков и формирования информационных сообщений на два вычислителя. Структурная схема информационно-управляющей системы, содержащая систему сбора и обработки информации и систему отображения информации, приведена на рисунке 1.3.2.
Рисунок 1.3.2 – Информационно-управляющая система с двумя вычислителями
Такой подход к построению информационно-управляющей системы также имеет ряд недостатков, относящихся к топологии системы. Датчики расположены на машине в различных точках. Это приводит, во-первых, к сложной организации разводки кабельного оборудования. Многие датчики имеют слабый сигнал, и при прокладке кабеля на большое расстояние происходит ослабление сигнала, засорение его помехами, наводками. Кроме того, система имеет низкую надежность. При обрыве кабеля информация с датчика полностью теряется, или, что еще хуже, вычислитель может понять отсутствующий сигнал за исправный, что приводит к аварийным ситуациям. Для решения этой задачи предлагается иной подход к построению информационно-управляющей системы. Каждый датчик выполняется в виде законченного мехатронного модуля, содержащего непосредственно первичный преобразователь (датчик), устройство преобразования сигнала и вычислитель. В классе мехатронных устройств – так называемые МЕМCы. МЭМС – микроэлектромеханические системы — устройства, объединяющие в себе микроэлектронные и микромеханические компоненты. Для управления исполнительными устройствами также создается модуль, в состав которого входит вычислитель, усилитель-преобразователь и исполнительный механизм. Структурные схемы модулей показаны на рисунке 1.3.3. Каждый модуль выполняется в виде специализированного контроллера, содержащего вычислительное устройство и преобразователь.
Рисунок 1.3.3 – Модули преобразователей Так как для обработки информации с дискретных датчиков не требуется сложных преобразований, то их можно подключить к модулю аналогового или импульсного датчика, который физически расположен ближе к дискретному датчику. В этом случае модули необходимо снабдить несколькими входами дискретного ввода. Для связи модулей преобразователей с главным бортовым компьютером каждый модуль должен иметь последовательный интерфейс связи, например RS-485, USB или CAN. CAN-интерфейс постепенно становится стандартом для распределенных систем управления на транспорте, в автомобильной технике и робототехнике. Можно также использовать интерфейс SERCOS, разработанный для цифровых следящих приводов и представляющий собой локальную кольцевую оптоволоконную сеть. Структурная схема информационно-управляющей системы, построенной с использованием автономных модулей, приведена на рис.1.3.4. Все модули объединены в бортовую двухпроводную или однопроводную сеть. Дублирование линий связи позволяет существенно повысить надежность такой системы. На первый взгляд такой подход приведет к существенному удорожанию информационно-управляющей системы. Однако это не так. Каждый вычислитель предназначен для выполнения узкоспециализированных задач и выполняется на недорогих контроллерах.
Рисунок 1.3.4 – Информационно-управляющая система на автономных модулях
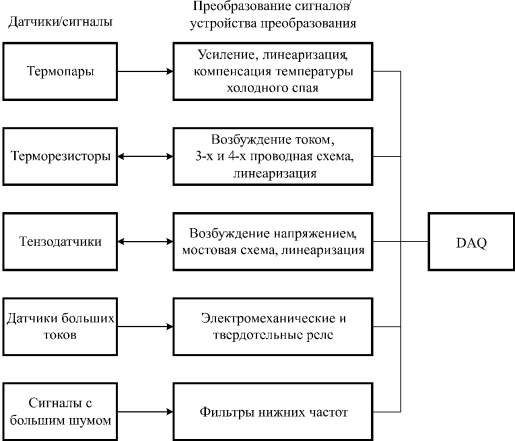
Еще один подход к построению модуля это использование программируемых логических интегральных схем – ПЛИС. ПЛИС представляет собой матрицу логических вентилей, логика работы и переключения которых может быть задана программным образом. Популярность данной технологии обусловлена, прежде всего, малыми размерами устройств, скоростью их работы, малым энергопотреблением и гибкостью по отношению к обновлению логики работы ядра ПЛИС. ПЛИС представляет собой микросхему, содержащую миллионы несоединённых логических вентилей И/ИЛИ, которые с помощью специальных программных средств могут быть настроены и электрически сконфигурированы для выполнения специфических аппаратных функций. Обычно программирование ПЛИС микросхем требует от пользователя знания достаточно сложных языков, таких, как VHDL. Именно сложность программирования ПЛИС привела к тому, что многие инженеры отказываются от использования старой технологии в приложениях измерений, автоматизации, управления и сбора данных. Современная технология реконфигурируемого ввода/вывода позволяет существенно сократить время, затрачиваемое на обучение инженеров программированию ПЛИС. Компания National Instruments предлагает технологию реконфигурируемого ввода/вывода (reconfigurable input/output) RIO и представляет пользователям возможность графического моделирования и конфигурирования ПЛИС в приложениях измерений и автоматизации. Таким образом, интеграция технологии реконфигурированного ввода/вывода переводит процесс создания приборов на совершенно другой уровень, предлагающий разработчикам более гибкие инструменты для удовлетворения требований заказчика. Устройства на базе ПЛИС обладают реконфигурируемой цифровой архитектурой, включающей в себя матрицу конфигурируемых логических блоков, окруженных периферийными блоками ввода/вывода. В пределах матрицы ПЛИС возможна произвольная маршрутизация сигналов посредством управления программируемыми переключателями и коммутирующими линиями. Цепи ПЛИС представляют собой реконфигурируемую счетную машину, осуществляющую параллельную обработку данных и исполняющую приложения на аппаратном уровне микросхемы. Можно разработать на базе ПЛИС свои собственные схемы управления и сбора данных с тактированием и синхронизацией процессов с точностью до 25 нс. Благодаря возможности параллельной обработки данных, заложенной в ПЛИС, добавление новых вычислений в программу, исполняемую на микросхеме, не приводит к уменьшению скорости исполнения приложений. Реконфигурируемая ПЛИС в сочетании с процессором реального времени, а вместе это Compact RIO, позволяют создавать автономные встраиваемые и распределенные приложения, а также промышленные модули ввода/вывода со встроенным согласованием сигналов, возможностью прямого подключения датчиков и поддержкой горячего подключения. ПЛИС, как ядро системы, обладает встроенными механизмами передачи данных во встроенный процессор реального времени для их последующего анализа, обработки и сохранения, а также для связи с внешними устройствами. При этом каждый из модулей ввода/вывода содержит в себе встроенные разъемы, систему согласования сигналов, цепи преобразования (такие как ЦАП и АЦП), а также изоляционные барьеры. Поддержка расширенного диапазона напряжений и различных промышленных типов сигналов позволяет напрямую подключить к модулям датчики и управляемые устройства. Благодаря своей невысокой стоимости, надежности и пригодности для использования в широком классе встраиваемых контрольно-измерительных приложений, Compact RIO может применяться практически во всех отраслях промышленности. Так, на базе систем Compact RIO решаются такие задачи, как групповое управление, дискретное управление, управление движением, бортовые измерения, мониторинг состояния машин, быстрое прототипирование управляющих систем, промышленные системы управления и сбора данных, распределенные системы управления и сбора данных, мобильный/портативный анализ шумов, вибраций и т.д. В частности, ориентированная на создание пользовательских приложений технология RIO позволяет, например, создать аппаратную систему управления шаговым или серво приводом, используя ПЛИС для расшифровки сигналов с тахометра или с квадратурного энкодера с целью проведения измерений координаты и скорости. Появление устройств с поддержкой реконфигурируемого ввода/вывода существенно расширяет возможности технологии приборов. Для программирования устройств с технологией RIO применяется программная среда LabVIEW, которая позволяет разрабатывать аппаратную часть контрольно-измерительных систем, идеально настроенных для решения специфических задач. К информационным и вычислительным ресурсам системы диагностики и контроля предъявляется ряд требований. Основной задачей всех измерительных систем является измерение и/или генерация реальных физических сигналов. В процессе сбора данных физические величины, такие, как напряжение, ток, давление и температура преобразуют в цифровой формат и вводят их в компьютер. Распространенные методы сбора данных реализуются с помощью встраиваемых в компьютер устройств и автономных измерительных приборов, приборов, поддерживающих интерфейс GPIB, систем стандарта PXI (расширение PCI для измерительной техники) и приборов с портом RS-232. GPIB (General Purpose Interface Bus) - стандартная шина, предназначенная для управления электронными измерительными приборами с помощью компьютера. Ее также называют IEEE 488, поскольку ее характеристики определяются стандартами ANSI/IEEE 488-1978, 488.1-1987, 488.2-1992. Максимальное расстояние между любыми двумя приборами - 4 м, среднее расстояние между приборами по всей шине - 2 м. Максимальная (общая) длина кабеля - 20 м. К каждой шине подключается максимум 15 приборов, причем не менее двух третей из них должны быть включены. Прежде чем компьютерная измерительная система сможет измерить некоторую физическую величину, например, температуру, физический сигнал с помощью датчика или измерительного преобразователя должен быть преобразован в электрический - ток или напряжение. Под преобразованием сигналов следует понимать процесс предварительной обработки сигналов с целью улучшения точности измерений, качества изоляции цепей (развязки), фильтрации и т.д. Чтобы измерять сигналы с датчиков, необходимо преобразовать их в форму, которую может воспринять устройство аналого-цифрового преобразования. Например, у большинства термопар выходное напряжение очень мало и соизмеримо с шумом. Следовательно, перед оцифровкой такого сигнала его необходимо усилить. Усиление (нормирование) является одной из форм преобразования. К другим типовым разновидностям преобразования сигналов относятся линеаризация, возбуждение датчика, развязка. На рисунке 1.3.5 показаны некоторые распространенные типы датчиков и сигналов и требуемые для них виды преобразования. Таким образом, наиболее целесообразно строить информационно-управляющую систему на основе автономных модулей. В качестве измерительных устройств текущих параметров следует применять интеллектуальные датчики (МЭМСы).
Рисунок 1.3.5 – Типы датчиков и сигналов и виды преобразования
Бортовая сеть должна быть в варианте одно или двухпроводной или на оптоволоконной линии передачи. Учитывая специфику транспортного средства в части характера выполняемых работ и безопасности экипажа, линия связи должна быть резервирована (в простейшем варианте дублирование по бортам)[2].
Климат-контроль
Система климат-контроля обеспечивает полностью автоматическое и эффективное управление климатом в салоне автомобиля. Основным ее элементом на автомобиле является блок отопителя-кондиционера. Именно в нем холодный воздух превращается в теплый и наоборот, а в конструкции и принципах управления этим блоком заключены основные различия между климатическими установками различного типа. Пользователь системы климат- контроля избавлен от необходимости двигать рычаги заслонок - ему нужно лишь задать желаемую температуру. Микропроцессорное устройство, ориентируясь на информацию, приходящую от различных датчиков (температурных, а в некоторых системах и датчиков уровня солнечной радиации), автоматически выбирает, устанавливает и поддерживает нужные режимы независимо от внешней температуры и погодных условий.
Круиз-контроль
Круиз-контроль – это система управления скоростью автомобиля. Она получает сигнал от положения педали управления подачей топлива и поддерживает заданную водителем скорость вне зависимости от погодных и дорожных условий. Система имеет обратную связь, при помощи которой производится сравнение заданной и действительной скоростей движения. Когда блок сравнения обнаруживает различие между ними, он формирует сигнал для открытия или закрытия дроссельной заслонки. Нестабильность скорости движения автомобиля уменьшается за счет включения специального блока задержки сигналов. Установленный на педали тормоза выключатель гарантирует мгновенное отключение системы. На некоторых моделях выключатель установлен и на педали сцепления во избежание перегазовки двигателя при переключении передач. Адаптивный круиз-контроль (АСС - Adaptive Cruise Control) – усовершенствованная система круиз-контроля, которая может автоматически поддерживать не только скорость, но и безопасную дистанцию до впереди идущего автомобиля. С помощью встроенных в переднюю часть машины радаров, система измеряет расстояние до находящегося впереди автомобиля и в случае сокращения дистанции сбавляет скорость, а при необходимости слегка притормаживает машину. Как только расстояние увеличивается, автомобиль опять набирает заданную скорость. Если расстояние до препятствия сокращается очень быстро, система звуковым сигналом сообщает водителю о необходимости принудительного торможения. Радиолокационный контроль дороги основан на эффекте Доплера. Приемопередатчик, встроенный в переднюю часть автомобиля, непрерывно испускает радиоволны. При отражении эти волны возвращаются и улавливаются приемным устройством. По изменению частоты сигнала определяются расстояние до препятствия и относительная скорость движения автомобиля.
Бортовой компьютер В последние годы в связи со значительным снижением стоимости микропроцессоров компьютерная техника все шире внедряется в автомобилестроение, и бортовой компьютер становится обычным оборудованием автомобиля. Типичный бортовой компьютер может давать следующую информацию: - дату и время; - мгновенный расход топлива; - средний расход топлива; - стоимость топлива на километр (или милю) пробега; - ожидаемое время прибытия в пункт назначения; - ожидаемый пробег на оставшемся топливе; - количество израсходованного топлива; - температура наружного воздуха; - пройденный путь. Для расчета компьютером некоторых параметров водитель должен перед выездом ввести в него исходные данные, после чего компьютер сможет давать указанную выше информацию при нажатии соответствующей кнопки на пульте управления. Для отображения информации все чаще применяются цветные жидкокристаллические дисплеи.
Особенности различных типов архитектур биус Элементы системы. Бортовая информационно-управляющая система (БИУС) транспортного средства (ТС) – это комплекс средств для автоматической оценки состояния автомобиля и его агрегатов, для оценки параметров движения, для информирования водителя об этих состояниях и выработки управляющий воздействий на исполнительные механизмы автомобиля в процессе выполнения различных функциональных задач. Принцип работы БИУС заключается в следующем. Сигналы с датчиков, установленных на ТС, поступают в вычислитель, который формирует заключение и выдает его в виде информации о состоянии контролируемого объекта водителю и автоматическим исполнительным системам. По своей структуре БИУС должна состоять из следующих элементов: 1) комплекта датчиков, воспроизводящих диагностическую информацию от объекта диагностирования; 2) преобразователей, принимающих сигналы от датчиков и преобразующих их в вид, удобный для дальнейшей обработки; 3) устройств обработки информации, проводящих оценку полученных данных диагностирования по заданной программе и выдающих конечные результаты в виде электронных сигналов; 4) устройств выдачи информации, фиксирующих результаты диагностирования на носителе информации. Для оценки состояния и поведения транспортного комплекса используется информация, получаемая датчиков, как правило, аналоговых и импульсных типов, имеющих различные диапазоны измерения. Многие эти датчики имеют нелинейную характеристику. Используются также дискретные датчики, чаще всего релейного типа. Для подключения датчиков к микропроцессорам/контроллерам, выполняющим сбор и обработку информации с датчиков , а так же формирующие информационные сообщения и управляющие воздействия на исполнительные механизмы, необходимо выполнить обработку сигналов. К обработке сигнала относится нормирование сигнала, т.е. приведение его к определенному значению, фильтрация, линеаризация, аналогово-цифровое преобразование и другие виды обработки. Из анализа возможных схем построения систем датчиков, преобразователей, вычислителей БИУС можно сделать вывод о целесообразности построения и использования мехатронных модулей (ММ). Каждый ММ выполняется в виде законченного модуля, содержащего непосредственно первичный преобразователь (датчик), устройство преобразования сигналов и вычислитель. Для управления исполнительными устройствами так же создается модуль, в состав которого входит вычислитель, усилитель-преобразователь и исполнительный механизм. Структурные схемы модулей показаны на рисунке 1.1. каждый модуль выполняется в виде специализированного контроллера, содержащего вычислительное устройство и преобразователь. Рисунок 1.1 – Мехатронные модули.
При использовании дискретных датчиков не требуется сложных преобразований, и поэтому, рационально их подключить к ММ, который физически расположен ближе к дискретному датчику. Это потребует использование контроллера с несколькими входами. В общем случае все ММ автомобиля по функциональному назначению могут быть отнесены к следующим основным группам: - системы управления двигателем; - системы управления трансмиссией и агрегатами; - системы управления ходовой частью, в том числе и тормозными системами; - системы управления оборудованием кабины; - системы диагностики/самодиагностики узлов агрегатов автомобиля. Использование концепции ММ позволяет в значительной степени абстрагироваться в процессе проектирования сложного объекта (БИУС) от исполнительной и информационных частей (считая, что они компонуются из готовых блоков – мехатронных модулей), а сосредоточить основное внимание на разработке компьютерного управления.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 338; Нарушение авторского права страницы