|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Система управления курсовой устойчивостью автомобиля
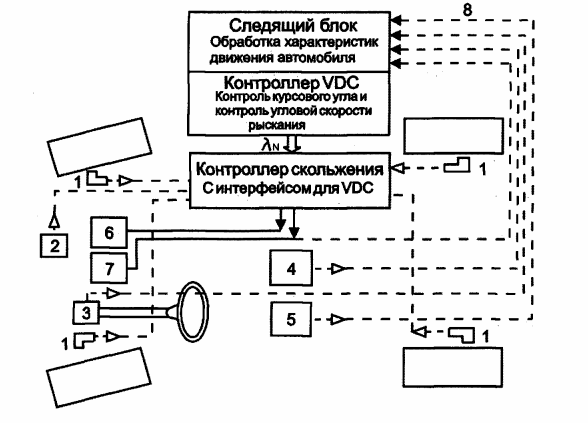
Система управления курсовой устойчивостью автомобиля (англ. Vehicle Dinamic Control, VDC) представляет собой систему с обрат ной связью, которая позволяет сохранить курсовую устойчивость во время движения автомобиля. Она объединена с тормозной системой и силовой передачей. В России ее называют противозаносной систе мой (ПЗС). Система VDC упреждает опережение или запаздывание поворота автомобиля во время управления им. Преимущества ABS и ASR развиваются системой VDC за счет повышения активной безопасности движения во время управления автомобилем по следующим пунктам: - обеспечение водителя активной помощью даже в критических динамических ситуациях; - увеличение курсовой устойчивости автомобиля даже при пре дельно сложных условиях дорожного движения для всех режимов эксплуатации, таких как полное или частичное торможение, движение накатом, разгон, торможение двигателем, изменение нагрузок; - повышение устойчивости движения даже во время экстремальных маневров управления (аварийная ситуация); - улучшение управляемости при предельно сложных условиях дорожного движения; - лучшее использование потенциала сцепления между шинами и дорожным покрытием в зависимости от условий движения по сравнению с ABS и ASR. На характеристику рулевого управления автомобиля можно по влиять посредством скольжения шин. В системе VDC эта характеристика шин используется в целях внедрения сервоуправления. Система VDC управляет не только скоростью вокруг вертикальной оси, но и курсовым углом. VDC не ограничивается ре жимами работы систем ABS и ASR, но также распространяется на режим движения автомобиля накатом и приводится в действие во время частичного торможения на пределе возможности управления автомобилем. Управление автомобилем на пределе физических возможностей должно учитывать три степени свободы автомобиля на плоскости дороги (продольная и поперечная составляющие движения и поворот относительно вертикальной оси). Первоначально необходимо определить, как правильно должен вести себя автомобиль в соответствии с действиями водителя (номинальное поведение) и как он фактически себя ведет на дороге (действительное поведение). В целях минимизации разницы между номинальным и действительным поведением, силы действия на шину должны управляться исполнительными механизмами. На рисунке 2.2.3 показана структура управления курсовой устойчивостью автомобиля, состоящая из главного контроллера VDC и контроллеров скольжения. С помощью главного контроллера вводится значение номинальной величины проскальзывания XN для контроллера скольжения. Следящий блок определяет переменную контролируемого состояния (курсовой угол автомобиля).
Рисунок 2.2.3 – Принципиальная схема системы управления курсовой устойчивостью автомобиля: 1 – датчики скорости вращения колес; 2 – датчик давления в тормозной системе; 3 – датчик положения рулевого колеса; 4 – датчик угловой скорости относительно вертикальной оси; 5 - датчик поперечного ускоре ния; 6 – модулятор давления; 7 – электронный блок управления тягой двигателя; 8 – сигналы датчиков для VDC; λN – номинальное проскальзывание шины.
Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе и органов управления работой двигателя. Помимо скорости движения автомобиля вычисляются также необходимые характеристики коэффициентов сцепления между шинами и дорожным покрытием. Эти параметры оцениваются на основе сигналов, получаемых от датчиков скорости вращения колес, поперечного ускорения, угловой скорости относительно вертикальной оси и давления в тормозной системе. Затем рассчитывается момент относительно вертикальной оси, который нужен для приближенного приведения параметров действительно го состояния к параметрам требуемого состояния. В целях получения требуемого момента рыскания необходимо, чтобы изменения в величинах относительного скольжения колес определялись по средством контроллера VDC. Затем эти величины устанавливаются с использованием контроллеров скольжения и тягового усилия с помощью исполнительного механизма гидравлической тормозной системы (модулятора давления) и электронного блока управления тягой двигателя. В данной системе применяется метод последовательных приближений компонентов ABS и ASR. Гидравлический модулятор с расширенными функциями ASR допускает высокий уровень динамического торможения всех колес при любых существующих температурах и в то же время надежно поддерживает необходимое разделение тормозных контуров. Необходимый крутящий момент двигателя может быть установлен посредством управления работой двигателя через интерфейс CAN. Далее рассмотрим, как ведет себя автомобиль во время работы ПЗС. ПЗС реагирует на критические ситуации в том случае, если известно, куда намерен ехать водитель и куда на самом деле едет автомобиль. Ответ на первый вопрос система получает от датчиков, определяющих угол поворота рулевого колеса и угловые скорости колес автомобиля. Ответ на второй вопрос можно получить, измерив угол поворота автомобиля вокруг вертикальной оси и величину его поперечного ускорения. Если от датчиков поступают разные ответы на упомянутые выше вопросы, то существует вероятность возникновения критической ситуации, при которой необходимо вмешательство ПЗС. Критическая ситуация может прояв – ляться в двух вариантах поведения автомобиля: недостаточная и избыточная поворачиваемость автомобиля. В случае недостаточной поворачиваемости автомобиля ПЗС дозированно подтормаживает заднее колесо на внутренней сто ронеповорота, а также воздействует на системы управления работой двигателя и АКП (если автомобиль оборудован автоматической трансмиссией). В результате добавления к сумме сил тормоз ной силы, приложенной к упомянутому выше колесу, вектор результирующей силы, действующей на автомобиль, поворачивается в сторону поворота и возвращает машину на заданную траекторию движения, предотвращая выезд за пределы проезжей части и обеспечивая тем самым вписываемость в поворот. В случае избыточной поворачиваемости автомобиля ПЗС дозированно подтормаживает переднее колесо на внешней стороне поворота и воздействует на системы управления работой двигателя и АКП (если автомобиль оборудован автоматической трансмиссией). Вследствие чего вектор результирующей силы, действующей на автомобиль, поворачивается наружу поворота, предотвращая тем самым занос автомобиля и следующее за ним неуправляемое вращение вокруг вертикальной оси. Еще одной распространенной ситуацией, в которой требуется вмешательство ПЗС, является объезд неожиданно возникшего на дороге препятствия. В случае, если автомобиль не оборудован ПЗС, события часто развиваются по следующему сценарию. Чтобы избежать столкновения с неожиданно возникшим препятствием, водитель резко поворачивает влево, а затем, чтобы возвратиться на ранее занимаемую полосу, вправо. В результате автомобиль резко поворачивается и возникает занос задних колес, переходящий в неуправляемое вращение автомобиля вокруг вертикальной оси. Развитие ситуации в случае с автомобилем, оборудованным ПЗС, выглядит несколько иначе. Водитель пытается объехать препятствие, как и в первом случае. По сигналам датчиков ПЗС распознает возникший неустойчивый режим движения автомобиля, производит необходимые вычисления и (в качестве контрмеры) подтормаживает левое заднее колесо, способствуя тем самым по вороту автомобиля. При этом сила бокового увода передних колес сохраняется. Пока машина движется по дуге влево, водитель начинает поворачивать рулевое колесо вправо. Чтобы способствовать повороту автомобиля вправо, ПЗС подтормаживает правое перед нее колесо. Задние колеса при этом вращаются свободно, благодаря чему оптимизируется действующая на них боковая сила увода. Предпринятая водителем смена полосы движения может вызвать резкий поворот автомобиля вокруг вертикальной оси. Чтобы предотвратить занос задних колес, подтормаживается левое переднее колесо. В особо критических ситуациях это торможение должно быть очень интенсивным, чтобы ограничить нарастание боковой силы увода, действующей на передние колеса. Рекомендуется выключать ПЗС при «раскачке» автомобиля, застрявшего в глубоком снегу или рыхлом грунте, езде с цепями противоскольжения и проверке автомобиля на динамометрическом стенде. Отключение ПЗС осуществляется нажатием кнопочного выключателя на панели приборов, включение – повторным нажатием на указанную клавишу. При запуске двигателя ПЗС находится в рабочем режиме.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 294; Нарушение авторского права страницы