
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Место дисциплины в структуре ОПОП.Стр 1 из 8Следующая ⇒
ПРОГРАММА дисциплины “Автоматика морских информационных систем ”
Направление подготовки(специальности) 180800 - «Корабельное вооружение» шифр и название направления подготовки
Направленность(профиль): Морские информационные системы и оборудование При наличии: название направления подготовки
Квалификация (степень) – Бакалавриат бакалавр/магистр/специалист
Санкт–Петербург 2017
Рекомендована учёным советом факультета информационных систем и технологий РГГМУ (Протокол №___ от _____________ 2017 г.)
Составил: Юдин Юрий Александрович, доцент ФИО – должность Рецензент: ___________________________________ ФИО – должность, организация
Ó Ю.А.Юдин, 2017. Ó РГГМУ, 2017. ЦЕЛИ ОСВОЕНИЯ ДИСЦИПЛИНЫ Дисциплина " Автоматика морских информационных систем" является одной из профессиональных дисциплин формирующих специалиста по Корабельному вооружению. (Профиль подготовки – Морские информационные системы и оборудование). Целью освоения дисциплины – является формирование у студентов комплекса научных знаний, умений и определенных навыков в решении практических задач, связанных с анализом, разработкой, проектированием и применением систем автоматического управления в морских информационных системах. Для успешного усвоения данной дисциплины необходимо, чтобы студент владел знаниями, умениями и навыками, сформированными в процессе изучения таких дисциплин как: - «Математический анализ» - владеть навыками использования методов математического анализа к решению прикладных задач. - « Объекты морской техники» - знать конструктивные особенности объектов морской техники и их энергетики, постройки и использования по назначению. - « Информатика» - владеть навыками работы с офисными приложениями и специализированными пакетами прикладных программ (Math CAD, Math LAB) Дисциплина “ Автоматика морских информационных систем ” относится к числу дисциплин базовой части профессионального цикла.
Место дисциплины в структуре ОПОП. Дисциплина " Автоматика морских информационных систем " для направления подготовки 18080 0 - «Корабельное вооружение», профиля - «Морские информационные системы и оборудование» относится к дисциплинам базовой части профессионального цикла и обеспечивает формирование основных знаний, понятий и навыков в данной области. Для успешного усвоения данной дисциплины необходимо, чтобы студент владел знаниями, умениями (навыками), сформированными в процессе изучения таких дисциплин как «Объекты морской техники»; «Математический анализ»; «Физика»; «Информационные технологии в управлении «Теоретическая механика», «Электротехника», «Морские информационные системы».
Таблица 2 Соответствие уровней освоения компетенции планируемым Структура дисциплины Очная форма обучения
П/п |
Раздел и тема Дисциплины |
Семестр |
Виды учебной работы, в т.ч. самостоятельная работа студентов, час. | Формы текущего контроля успевае- мости |
Занятия в Активной и Интерактивной форме, час. |
Формируемые компетенции | |||||
| Лекции | Семинары Лаборат. Практич. | Самост. работа | |||||||||
| 1 | Введение | 2 | 2 | - | - | Вопросы по лекции- | - | ОК-1, ОК-6 ОК-7 | |||
| 2 | Динамические характеристики элементов и систем автоматического управления | 6 | 2 | 4 | Вопросы по лекции. Опрос на пр. занятии- Отчет по лабораторной работе | -- | ОК-6, ОК-7 ОПК-2, ОПК-3 ПК-1, ПК-3 | ||||
| 3 | Математические модели линейных систем автоматического управления и их элементы | 8 | 2 | 4 | 2 | Вопросы по лекции. Опрос на пр. занятии- Отчет по работе | - | ОК-6, ОК-7 ОПК-1, ОПК-2 ОПК-3, ПК-1 ПК-3 | |||
| 4 | Структурные схемы систем автоматического управления и их преобразование | 30 | 2 | 8 | 2 | Вопросы по лекции. Опрос на пр. занятии | 18 | ОК-6, ОК-7 ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-4. ПК-5. | |||
| 5 | Устойчивость автоматических систем | 10 | 4 | 4 | 2 | Вопросы по лекции. Опрос на пр. занятии- | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-3. ПК-4, ПК-5. | ||||
| 6 | Типовые законы регулирования и типы регуляторов | 16 | 2 | 8 | 2 | Вопросы по лекции. Опрос на пр. занятии. Отчет по лабораторной работе | 4 | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-3. ПК-4, ПК-5. | |||
| 7 | Методы оценки качества систем автоматического управления | 16 | 2 | 8 | 2 | Вопросы по лекции. Опрос на пр. занятии. Отчет по лабораторной работе | 4 | ОК-6, ОК-7, ОПК-2, ОПК-3, ПК-1, ПК-3, ПК-4, ПК-5. | |||
| 8 | Основные элементы и устройства систем автоматического управления | 14 | 2 | 6 | 4 | Вопросы по лекции. Опрос на пр. занятии. Отчет по лабораторной работе | 2 | ОПК-2, ОПК-3, ПК-4, ПК-5. | |||
| 9 | Разработка и проектирование систем автоматического управления | 16 | 4 | 6 | 2 | Вопросы по лекции. Опрос на пр. занятии | 4 | ОК-6, ОК-7, ОПК-2, ОПК-3, ПК-1, ПК-4, ПК-5. | |||
| 10 | Использование и техническое обслуживание систем автоматического управления | 10 | 4 | 4 | 2 | Вопросы по лекции. Опрос на пр. занятии | - | ОК-6, ОК-7, ОПК-2, ОПК-3, ПК-3, ПК-4, ПК-5. | |||
| 11 | Современные направления развития мехатроники | 14 | 2 | 8 | 2 | Вопросы по лекции | 2 | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-3, ПК-4, ПК-5 | |||
| 12 | Заключение | 2 | 2 | - | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-3. ПК-4, ПК-5. | ||||||
| ИТОГО | 144 | 30 | 30+30 | 20 | 34 | ||||||
Содержание разделов дисциплины
Введение.
Предмет и задачи дисциплины, ее содержание и структура. Связь с другими дисциплинами.
Автоматическое управление как совокупность разнородных процессов направленных на поддержание или улучшения заданных функций управляемого объекта или процесса.
Классификация систем автоматических управления ( САУ). Роль САУ в современных системах автоматического управления информационными процессами.
4.2.2. Основные типовые элементы САУ. Их характеристики.
Типовые функциональные элементы САУ и их классификация. Виды входных и выходных сигналов элементов САУ. Их частотные, временные, импульсные, переходные и динамические характеристики. Особенности указанных характеристик и правила их построения.
Заключение
Тенденции развития теории управления. Современные САУ использующие микропроцессорную технику. Адаптивные и интеллектуальные системы автоматического управления.
4.3. Семинарские, практические, лабораторные занятия, их содержание
| № п/п | № раздела дисциплины | Тематика практических занятий | Форма проведения | Формируемые компетенции |
| 1. | 2 | Динамические характеристики САУ | ОК-6, ОК-7, ОПК-2, ОПК-3, ПК-1, ПК-3 | |
| 2.1.Передаточные функции систем автоматического управления в разомкнутом и замкнутом состояниях. Передаточные функции замкнутой системы. 2.2 Ошибки САУ в установившихся режимах | Семинар №.1 | |||
| 2.3 Частотные характеристики звеньев и систем автоматического управления: - амплитудно-частотная и фазо-частотная характеристики; - амплитудно-фазовая частотная характеристика (АФЧХ). 2.4. Амплитудно-фазовые частотные характеристики динамических звеньев. Амплитудно-фазовые частотные характеристики САУ в разомкнутом состоянии. 2.5.Логарифмические частотные характеристики систем автоматического управления в разомкнутом состоянии | Семинар № 2 | |||
|
2.. | 3. | Математические модели САУ и их элементов | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1 ПК-3 | |
| 3.1. Передаточные функции элементов и систем. Формы представления математических моделей САУ. 3.2 Исследование переходных характеристик и динамических свойств типовых звеньев САУ | Практическое занятие № 1 | |||
| 3
| 4. | Структурные схемы САУ и их преобразование | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1 ПК-3 | |
| 4.1.Типовые динамические звенья 1и2 порядка | Семинар № 3 | |||
| 4.2. Передаточные функции и характеристики типовых звеньев. | Семинар № 4 | |||
| 4.3.Формализация и вычисления передаточных функций одномерных и многомерных САУ.. | Семинар № 5 | |||
| 4 | 5. | Устойчивость систем автоматического управления | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-3. ПК-4, ПК-5 | |
| 5.1. Понятие устойчивости систем. Методы обеспечения устойчивости. Критерии устойчивости САУ | Семинар №6 | |||
| 5.2. Методы оценки устойчивости работы САУ. Критерии оценки устойчивости САУ – алгебраический Гурвица, частотные Михайлова, Найквиста. | Семинар №7 | |||
| 6 | Типовые законы регулирования и типы регуляторов. | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-3. ПК-4, ПК-5. | ||
| 6.1 Законы регулирования | Семинар №8 | |||
| 6.2.Регуляторы прямого и непрямого действия. | Семинар №9 | |||
| 6.3. Классификация регуляторов и области применения. | Семинар №10 | |||
| 6.4. Структурные схемы и передаточные функции регуляторов. | Семинар№11 | |||
| 7. | Методы оценки качества систем автоматического управления | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-1, ПК-3. ПК-4, ПК-5. | ||
| 7.1. Основные понятия и показатели качества переходных процессов в автоматических системах | Семинар№12 | |||
| 7.2. Показатели качества и точность работы автоматических систем управления в установившихся режимах работы при различных воздействиях. | Практическое занятие № 2 | |||
| 7.3. Показатели качества и точность работы автоматических систем управления при различных воздействиях. | Практическое занятие № 3 | |||
| 7.4. Прямые показатели качества по кривой переходного процесса. Оценка качества по амплитудно-фазовым и логарифмическим характеристикам | Практическое занятие № 4 | |||
| . | 8. | Основные элементы и устройства систем автоматического управления | ОПК-2, ОПК-3, ПК-4, ПК | |
| 23 | 8.1. Исполнительные механизмы, электромагнитные и электромеханические. Реле, их типы и характеристики | Семинар №13 | ||
| 24. | 8.2. Передаточные функции элементов. Усилители, их назначение и классификация. | Семинар № 14 | ||
| 25. | 9 | Разработка и проектирование систем автоматического управления | ОК-6, ОК-7, ОПК-2, ОПК-3, ПК-1, ПК-4, ПК-5. | |
| 9.1. Принципы разработки САУ и их классификация. | Семинар № 15 | |||
| 26 | 9.2 Информационное обеспечение, классификация информационных массивов. | Семинар № 16 | ||
| 27. | 9.3 Состав и структура математического и программного обеспечения. | Семинар № 17 | ||
| 28 | 10 | Использование и техническое обслуживание систем автоматического управления | ОК-6, ОК-7, ОПК-2, ОПК-3, ПК-3, ПК-4, ПК-5. | |
| 29 | 10.1. Организация использования САУ по прямому назначению. | Семинар №1 8 | ||
| 30 | 10.2. Регламентные работы и организация их проведения в процессе использования объектов управления на различенных этапах их жизненного цикла.. | Семинар № 19 | ||
| 31 | 10.3. Специальное программное обеспечение для проведения тестирования и настройки САУ. Согласование выполнения регламентных работ САУ смоделью использования обекта управления. | Семинар № 20 | ||
| 32. | 11 | Современные направления развития мехатроники | ОК-6, ОК-7, ОПК-1, ОПК-2, ОПК-3, ПК-3, ПК-4, ПК-5 | |
| 33 | 11.1. Общее понятие о мехатронике и робототехнике. Базовые определения. Технологическое обеспечение мехатроных систем. 23 | Семинар № 21 | ||
| 11.2.Современные мехатроные системы и модули. Основные направления развития. | Семинар № 22 | |||
| 11.3. Тенденции развития теории управления. Современные САУ с использованием микропроцессорной техники. | Семинар № 23 | |||
| 11.4. Адаптивные и интеллектуальные системы управления. Основные направления развития | Семинар № 24 |
5. Учебно-методическое обеспечение самостоятельной работы студентов и оценочные средства для текущего контроля успеваемости, промежуточной аттестации по итогам освоения дисциплины
Текущий контроль
(Указываются вид и формы текущего контроля по дисциплине)
Текущий контроль при изучении данной дисциплины осуществляется по разделам в форме подготовки обучающимися Рефератов, Эссе, Докладов с последующим их обсуждением и защитой
А) Примерная тематика рефератов, эссе, докладов:
Рис. 1 – Схемы суммирующих звеньев
Звено – это устройство любого физического вида и конструктивного оформления, но описанное определенным дифференциальным уравнением. Звено – математическая модель любой части САУ.
Рисунок 3 – Параллельное соединение звеньев
Рисунок 4 – Обратное соединение звеньев
Участок цепи от точки приложения входного воздействия g до точки съёма выходного сигнала  (в направлении распределения сигнала) называется прямой цепью.
(в направлении распределения сигнала) называется прямой цепью.
Участок цепи от точки съема выходного сигнала до сумматора  называется обратной связью.
называется обратной связью.
 – передаточная функция прямой цепи.
– передаточная функция прямой цепи.
 - передаточная функция обратной связи (ОС).
- передаточная функция обратной связи (ОС).
Если сигнал обратной связи  вычитается из входного воздействия
вычитается из входного воздействия  , то обратная связь называется отрицательной обратной связью.
, то обратная связь называется отрицательной обратной связью.
Если сигнал обратной связи складывается со входным воздействием  , то обратная связь называется положительной обратной связью.
, то обратная связь называется положительной обратной связью.
Если передаточная функция обратной связи  , то обратная связь называется единичной, и структурную схему изображают так, как показано на рис. 5.
, то обратная связь называется единичной, и структурную схему изображают так, как показано на рис. 5.

Рис.5 – Обратное соединение звеньев с единичной
При размыкании замкнутой цепи сразу после сумматора получается цепь из 2-х последовательно соединенных звеньев (Рис.6)
.

Рис.6 Последовательное соединение звеньев
Ее передаточная функция, равная  называется передаточной функцией разомкнутой цепи (системы).
называется передаточной функцией разомкнутой цепи (системы).
Передаточная функция звена, охваченного обратной связью, равна передаточной функции  , (Рис.7), где плюс в знаменателе правой части берется при отрицательной обратной связи, минус – при положительной.
, (Рис.7), где плюс в знаменателе правой части берется при отрицательной обратной связи, минус – при положительной.

Рис.7 Передаточная функция звена, охваченного обратной связью
2 Правила преобразования структурных схем линейных систем
При преобразовании структурных схем возникает необходимость переноса сумматоров и узлов схем.
1. Перенос сумматора.
1.1. При переносе сумматора по ходу сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится сумматор, как это указано на Рис.8.



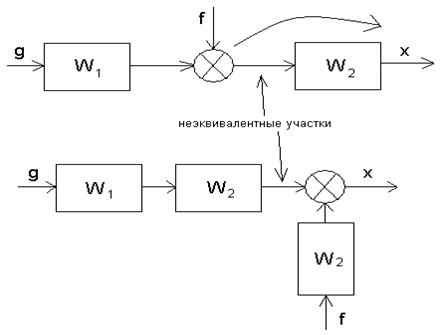
Рис.8 Схеме переносов звеньев по ходу сигнала.
1.2. При переносе сумматора против хода сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится сумматор.
1.3. При переносе сумматора возникают неэквивалентные участки цепи, поэтому нельзя переносить сумматор через точку съема сигнала.
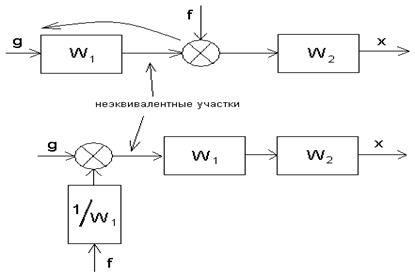
Рис.8 Схеме переносов звеньев по ходу сигнала.
2. Перенос узла.
2.1. При переносе узла по ходу сигнала добавляется звено с передаточной функцией, равной обратной передаточной функции звена, через которое переносится узел.
2.2. При переносе узла против хода сигнала добавляется звено с передаточной функцией, равной передаточной функции звена, через которое переносится узел.

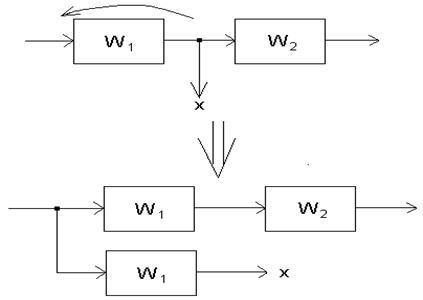

Рис. 9. Перестановка узлов. (Узлы можно переставлять местами)
4.Перестановка сумматоров. Сумматоры можно менять местами, но при этом участки между сумматорами не являются эквивалентными.



Рис.10 возможные схемы перестановки сумматоров.
5. При переносе узла через сумматор добавляется сравнивающее звено.



Рис.11.
6. При переносе сумматора через узел добавляется суммирующее звено.


Рис.12
Рис.11, 12 Иллюстрация добавления суммирующего и сравнивающего звеньев.
Учебно-методическое и информационное обеспечение дисциплины
а) основная литература:
1. Юревич Е.И. Теория автоматического управления. -3-е изд.-СПб.: БХВ-Петербург, 2007.-560с.
2. Бруслиновский Б.В. и др. Функциональные устройства судовых автоматизированных систем.-СПб.: Судостроение, 1991.-310с.
3. Клавдиев А.А. Теория автоматического управления в примерах и задачах. Ч.1: Учеб. Пособие.-СПб: СЗТУ, 2005.- 74с.
б) дополнительная литература:
1. Дьяконов В., Круглов В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник.-СПб.: Питер, 2002.-448с.
2. Попов Е.П. Теория линейных систем автоматического регулированиия и управления.- М.: Наука, 1986.-280с.
3. Каретников В.В., Ракитин В.Д., Сикарев А.А. Автоматизиция судовождения.-СПб.: СПГУВК, 2007.-265с.
4. Катханов М.Н. Теория судовых автоматических систем.-СПб.: Судостроение, 1985.-374с.
5. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления.-СПб.: Профессия, 2003.-250с.
6. Интеллектуальные системы автоматического управления. Под ред. И.М. Макарова и В.М. Лохина.-М.: Физматлит, 2001.-210с.
7. Методы классической и современной теории автоматического управления. В пяти томах.-М.: Изд. МГТУ им. Н.Э. Баумана, 2004.
8. Синергетика и проблемы управления. Под ред. А.А.Колесникова.-М.: Физматлит, 2004.-250с.
9. Юревич Е.И. Основы робототехники.-СПб.: БХВ-Петербург, 2005.-300с.
в) программное обеспечение и Интернет-ресурсы:
Практические занятия.
7.3 Семинарские или
7.4. лабораторные занятия,
7.5.Самостоятельная работа студента,
7.6. Текущий контроль
7.7 Промежуточный контроль).
8. Информационные технологии, используемые при осуществлении образовательного процесса по дисциплине, включая перечень программного обеспечения и информационных справочных систем (при необходимости)
| Тема (раздел) дисциплины | Образовательные и информационные технологии | Перечень программного обеспечения и информационных справочных систем |
ПРОГРАММА
дисциплины
“Автоматика морских информационных систем ”
Направление подготовки(специальности)
180800 - «Корабельное вооружение»
шифр и название направления подготовки
Направленность(профиль): Морские информационные системы и оборудование
При наличии: название направления подготовки
Квалификация (степень) – Бакалавриат
бакалавр/магистр/специалист

Санкт–Петербург
2017
Рекомендована учёным советом факультета информационных систем и
технологий РГГМУ
(Протокол №___ от _____________ 2017 г.)
Составил: Юдин Юрий Александрович, доцент
ФИО – должность
Рецензент: ___________________________________
ФИО – должность, организация
Ó Ю.А.Юдин, 2017.
Ó РГГМУ, 2017.
ЦЕЛИ ОСВОЕНИЯ ДИСЦИПЛИНЫ
Дисциплина " Автоматика морских информационных систем" является одной из профессиональных дисциплин формирующих специалиста по Корабельному вооружению. (Профиль подготовки – Морские информационные системы и оборудование).
Целью освоения дисциплины – является формирование у студентов комплекса научных знаний, умений и определенных навыков в решении практических задач, связанных с анализом, разработкой, проектированием и применением систем автоматического управления в морских информационных системах.
Для успешного усвоения данной дисциплины необходимо, чтобы студент владел знаниями, умениями и навыками, сформированными в процессе изучения таких дисциплин как:
- «Математический анализ» - владеть навыками использования методов математического анализа к решению прикладных задач.
- « Объекты морской техники» - знать конструктивные особенности объектов морской техники и их энергетики, постройки и использования по назначению.
- « Информатика» - владеть навыками работы с офисными приложениями и специализированными пакетами прикладных программ (Math CAD, Math LAB)
Дисциплина “ Автоматика морских информационных систем ” относится к числу дисциплин базовой части профессионального цикла.
Место дисциплины в структуре ОПОП.
Дисциплина " Автоматика морских информационных систем " для направления подготовки 18080 0 - «Корабельное вооружение», профиля - «Морские информационные системы и оборудование» относится к дисциплинам базовой части профессионального цикла и обеспечивает формирование основных знаний, понятий и навыков в данной области.
Для успешного усвоения данной дисциплины необходимо, чтобы студент владел знаниями, умениями (навыками), сформированными в процессе изучения таких дисциплин как «Объекты морской техники»; «Математический анализ»; «Физика»; «Информационные технологии в управлении «Теоретическая механика», «Электротехника», «Морские информационные системы».
Последнее изменение этой страницы: 2019-04-19; Просмотров: 259; Нарушение авторского права страницы