|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Пропорционально-дифференциальный закон регулирования
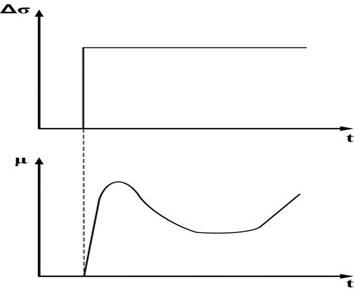
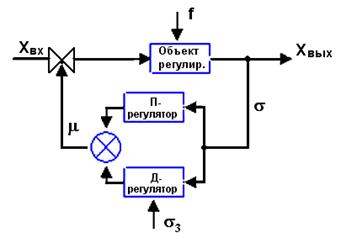
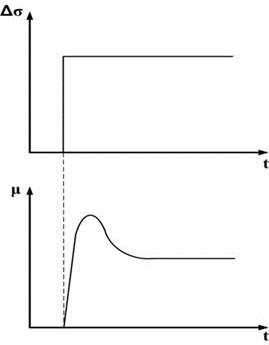
(ПД-регулятор) ПД – регулятор – регулятор, у которого изменение регулирующего воздействия m пропорционально отклонению регулируемой величины Ds и скорости этого отклонения. Регулирующий орган перемещается с некоторым опережением (предварением) пропорциональным скорости изменения регулируемой величины, поэтому действие предварения представляет временное увеличение коэффициента усиления регулятора. Ниже приведены структурная схема САР (рис. 11) с использованием ПИ-регулятора и переходная характеристика для идеального (рис. 12) и реального (рис.13) пропорционально-дифференциального регулятора.
Рис. 11. Структурная схема.
Рис. 12. Переходная характеристика идеального ПД-регулятора
Рис. 13. Переходная характеристика реального ПД-регулятора. Достоинства: сокращенное время регулирования. Недостатки: вероятность появления ошибки регулирования, если временные свойства объекта не постоянны. ПИД – регулятор – регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемого параметра, интегралу и скорости этого отклонения. Ниже приведены структурная схема САР (рис. 14) с использованием ПИД-регулятора и переходная характеристика для идеального (рис. 15) и реального (рис.16) пропорционально-интегрально-дифференциального регулятора.
Рис. 14. Структурная схема.
Рис. 15. Переходная характеристика идеального ПИД-регулятора
Рис. 16. Переходная характеристика реального ПИД-регулятора. Достоинства: сочетает достоинства П-, И-, ПД-, ПИ- регуляторов. Недостатки: высокая стоимость. Б) Образец оформления ЭССЕ. Тема: «Основные направления современного развития понятия «МЕХАТРОНИКА» Вступление Сегодня поддерживается тезис о том, что мехатроника представляет собой компьютерную парадигму развития автоматики и технической кибернетики. Ключевые слова: мехатроника, эволюция мехатроники, парадигма. Анализируются развитие понятия «мехатроника» и эволюция представлений о предметной области мехатроники. Поддерживается тезис о том, что мехатроника представляет собой компьютерную парадигму развития автоматики и технической кибернетики.
Введение в проблему Термин «мехатроника» и производные от него термины «электромехатроника», «на-номехатроника» и т.п. в последние годы популярны в научном сообществе. Обусловлено это тем, что мехатроника прежде всего как область научно-технического знания в настоящее время находится в стадии интенсивного развития как за рубежом, так и в России. Отметим, что в России издается периодическое издание на эту тему - журнал «Мехатроника, автоматизация, управление», в котором публикуются монографии, сборники статей, учебная литература, проводятся научные конференции и выставки мехатронной техники. Сегодня в нашей стране, по мехатронной тематике работают исследовательские, производственные и инновационные организации, осуществляется подготовка бакалавров, специалистов, магистров. По мехатронной тематике защищаются диссертации. Основные аргументы актуальности проблематики.
Согласно существующим прогнозам [1, 2], В ближайшем будущем, мехатроника наряду с информатикой и биоинженерией окажет революционизирующее влияние на развитие техносферы. В литературе по рассматриваемой тематике высказываются различные дискуссионные (и часто противоречивые) точки зрения, что обостряет интерес к базовым понятиям мехатроники и границам её применимости. Отмечается, что несмотря на актуальность обсуждаемого направления развития науки и техники, общепринятого его определения до сих пор нет. Рассматриваемые вопросы интересны для широкой аудитории специалистов особенно в части обсуждения парадигмальной концепции развития науки и, в частности, мехатроники. Именно по этой причине рецензент решил написать в порядке дискуссии настоящую статью и изложить в ней свою позицию по спорным положениям, имеющимся в [3]. Для понимания сути обсуждаемых вопросов рекомендуется читателю сначала ознакомиться с [3], а затем приступить к чтению нашей работы.
1. Эволюция мехатроники Первое наше замечание по статье [3] заключается в следующем: В названии статьи автор обещает раскрыть «развитие понятия «мехатроника». К сожалению, это обещание автором не выполнено. Поэтому первое замечание (точнее - пожелание) состоит в том, чтобы автор попытался раскрыть эволюцию понятия «мехатроника» от упомянутых им японских авторов до нового ГОС ВПО РФ 2009 г Приведем в порядке дискуссии определение мехатроники из ГОС ВПО РФ по направлению 221000 «Мехатроника и робототехника», утвержденного для бакалавров в ноябре 2009 г., а для магистров в декабре 2009 г.: «Мехатроника - область науки и техники, основанная на системном объединении узлов точной механики, датчиков состояния внешней среды и самого объекта, источников энергии, исполнительных механизмов, усилителей, вычислительных устройств (ЭВМ и микропроцессоры)». В новом ГОС ВПО РФ дается также определение мехатронной системы как единого комплекса «электромеханических, электрогидравлических, электронных элементов и средств вычислительной техники, между которыми осуществляется постоянный динамически меняющийся обмен энергией и информацией, объединенный общей системой автоматического управления, обладающей элементами искусственного интеллекта». Выше (см. введение к данной статье), в цитируемом ГОС ВПО РФ 2009 г. и в известной литературе (см. например [1, 2, 4, 5]) отмечается, что мехатроника - область науки и техники, а не «название машин» [3]. Для названия машин ГОС ВПО РФ предлагает другой термин: «мехатронная система». Различие в терминах очевидное! В обширной библиографии по мехатронике отмечается введение этого термина как неологизма, образованного слиянием базовых понятий «механика» и «электроника» [1, 3-5]. Заметим, что в монографии упоминаемых выше японских авторов [6] не дано определение понятия «мехатроника». В этой монографии отмечено, что «одной из ключевых проблем мехатроники является управление механическим движением с помощью компьютера». В отечественной литературе в качестве общего часто используется определение из ГОС ВПО РФ 1995 г. по направлению «Мехатроника и робототехника». Однако в справочной литературе термин «мехатроника» появился в России лишь в 2000 г. [7, 8]. В зарубежной литературе популярно определение из Оксфордской энциклопедии: «Мехатроника - японский термин для описания технологий, возникающих на стыке электротехники, машиностроения и программного обеспечения. Включает проектирование, производство и изучает функционирование машин с «разумным» поведением, т.е. действующих по заданной программе, их связи с другими материалами (искусственный интеллект, измерительное оборудование, системы управления)». В статье [1] приведена подборка определений понятия «мехатроника» из отечественной и зарубежной литературы, анализ которых позволил авторам [1] сделать следующий вывод: в отечественной литературе наиболее удачной является трактовка мехатроники как «науки о механических, энергетических и информационных процессах и их функциональном взаимодействии в машинах с микропроцессорным управлением», а в зарубежной литературе - как «объединение механических и электронных компонентов, скоординированных архитектурой управления» [1. С. 5]. Во вводной части цитируемой статьи [1] подчеркивается, что в этой статье отражается позиция единственного отечественного периодического издания в области мехатроники - журнала «Мехатроника, автоматизация, управление», поэтому приведенным определениям следует придать соответствующее значение. Из определений из ГОС ВПО РФ 1995 и 2009 гг. следует, что несмотря на некоторые расхождения в формулировках определения из нового ГОС ВПО РФ, остаются в рамках классической механической парадигмы мехатроники, сложившейся к концу XX в. [1]: - «мехатроника - область науки и техники, лежащая на стыке механики, микроэлектроники, информатики и автоматики; - мехатронная система - целесообразное сочетание механических устройств и электронно-вычислительных средств контроля и управления, образующих определенную информационно-управляемую целостность; - предмет мехатроники - компьютерное управление механическим движением». Отмечается, что «любая научная парадигма является динамичной, постоянно развивающейся, причем в своем применении она варьируется, обогащается и уточняется. Ввместе с тем парадигмы мехатроники в [3. Стр.10] предложено рассматривать мехатронику как «средство принятия решений по управлению функционированием физических систем». Физическая трактовка мехатроники развивается в работах [10, 11] и согласуется с особенностью микромехатронных систем, состоящей в том, что эти механизмы являются не пребразователями каких-либо механических передач или движений, а преобразователями вида энергии, например, электрической и тепловой в механическую. Итак, физическая трактовка мехатроники включает в себя, как частный случай, классическую механическую трактовку мехатроники, так как «механическое движение... является одной из самых простых форм движения» [1]. В цитируемой работе отмечается, «что происходит расширение классической парадигмы мехатроники, связанное с переходом от компьютерного управления механическими процессами к компьютерному управлению физическими процессами». Отмеченное расширение отражает эволюцию взаимосвязей различных форм движущейся материи: переход от наиболее простых, механических форм движения к более сложным, физическим формам движения. 2. О парадигме мехатроники Из анализа современных трактовок понятия «мехатроника» следует вывод о том, что мехатроника представляет собой компьютерную парадигму развития автоматики и технической кибернетики [1, ]. Авторы [1] отмечают, что происходит расширение классической парадигмы мехатроники, связанное с переходом от компьютерного управления механическими процессами к компьютерному управлению физическими процессами. В этой связи не выдерживает критики способ введения автором понятий «электромехатроника», «пневмомехатроника», «гидромехатроника», «пьезомехатроника» и т.п.. Например, согласно отмеченной выше парадигме «пневмомехатроника» развивается на базе «пневмоавтоматики». Как видно имеется очевидное противоречие вводимого автором понятия с упомянутой доминирующей парадигмой мехатроники, так как даже по составу элементов пневмомехатроника в трактовке [3] беднее пневмоавтоматики. Это относится и к другим известным достоинствам пневмоавтоматики: надежности, безопасности в пожарном отношении и защищенности от воздействия радиоактивных излучений. Из вышеизложенного следует второе замечание: предложенная автором классификация направлений мехатроники на 2-м уровне (см. рис. 1 в [3]) противоречит современному уровню развития автоматики и технической кибернетики. Из названных разделов статьи [3] следует, что в настоящее время одновременно существует как бы две парадигмы мехатроники: механическая и компьютерная. В [3] парадигмы мехатроники определяются её компонентами, а так как на 1-м уровне понятия «электромехатроника» введено 4 компоненты (см. рис. 1 в [3]), то парадигм электромехатроники возможно четыре? Этот вопрос оставим пока без ответа и обратимся к известным интерпретациям термина «парадигма». Понятие «парадигма» имеет различные толкования [15. С. 477]. В научном сообществе этот термин получил широкое распространение после работ американского историка физики Т. Куна, предложившего систему понятий, среди которых важное место принадлежит парадигме, т.е. «...признанным всеми научным достижениям, которые в течение определенного времени дают модель постановки проблем и их решений научному сообществу» [16]. В современной трактовке термин «парадигма» означает «некоторую систему общепринятых взглядов, признанных научным сообществом в рамках устоявшейся научной традиции в определенный период времени» [1]. Согласно модели Т. Куна, любая наука, в том числе и мехатроника, может находиться в одном из трех основных состояний: допарадигмальном, парадигмальном и межпарадигмальном. Ответ на поставленный выше вопрос следует из анализа куновской модели развития мехатроники как науки. В начальный период развития науки (допарадигмальная фаза) её предмет не отделен от других наук, и в ней наблюдается конкуренция большого числа расходящихся концепций и воззрений. В начале парадигмальной фазы развития науки появляется признанная научным сообществом доминирующая парадигма. Этот период развития науки Т. Кун называет нормальным. Межпарадигмальная фаза начинается с появления в науке проблем, неразрешимых в рамках доминирующей парадигмы и порождающей новые, альтернативные парадигмы. Многие ученые считают, что мехатроника в настоящее время находится в парадигмаль-ной фазе своего развития, т.е. существует признанная научным сообществом доминирующая парадигма [1, 2, 13], отмеченная нами выше. Из вышеизложенного следует ответ на поставленный выше вопрос. Строго говоря, в [3] рассматриваются не различные парадигмы мехатроники, в этой работе предпринята попытка компонентной трактовки доминирующей в настоящее время парадигмы мехатроники. Заключение Из анализа многих публикаций по мехатронике [1-3] следует, что мехатроника -это наука о компьютерном управлении в технических системах. По смыслу данное определение совпадает с определением кибернетики по А.И. Бергу[3]: кибернетика - наука об управлении сложными динамическими системами. Управление - ключевой термин, связывающий кибернетику и мехатронику. Отметим, что в кибернетике управление рассматривается в широком смысле и может существовать независимо от компьютеров, но её раздел - техническую кибернетику - современные исследователи [1] определяют как управление в технических системах в «компьютерной трактовке». То есть техническая кибернетика находится с мехатроникой в отношении непосредственной преемственности, характерном, например, для классической физики и физике современной [1].
Литература 1. Теряев Е.Д. Мехатроника как компьютерная парадигма развития технической кибернетики / Е.Д. Теряев, Н.Б. Филимонов, К.В. Петрин // Мехатроника, автоматизация, управление. - 2009. - № 6. - С. 2-10. 2. Теряев Е.Д. Наномехатроника: состояние, проблемы, перспективы / Е.Д. Теряев, Н.Б. Филимонов // Мехатроника, автоматизация, управление. - 2010. - № 1. - С. 2-14. 3. Осипов Ю.М. К вопросу о развитии понятия «мехатроника» // Наст. сб. - С. 193-198.
В.) Образец оформления Реферата
Тема: Преобразования структурных схем линейных систем автоматического управления (САУ)
Содержание: |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 277; Нарушение авторского права страницы
 (4)
(4)

 (5)
(5)