
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Назначение системы управленияСтр 1 из 4Следующая ⇒
Цель работы Спроектировать цифровую систему управления с заданным быстродействием для объекта с известной передаточной функцией. 2 Техническое задание Назначение системы управления Система предназначена для отслеживания входного сигнала Структурная схема системы управления Рисунок 2.1: Структурная схема системы управления. Исходные данные Передаточная функция объекта:
Передаточная функция фильтра:
2.4 Динамические требования к системе управления Длительность переходного процесса:
Степень устойчивости системы:
Характеристическое уравнение замкнутой системы:
Метод перехода от аналогового фильтра к цифровому Полуаналитический с вычислением производных по входу: интерполяционным методом: и экстраполяционным методом:
Проектирование аналоговой системы управления Теоретическая часть Найдём параметры аналогового фильтра. Передаточная функция фильтра, выраженная через физические параметры:
Передаточная функция объекта, выраженная через физические параметры:
Найдём передаточную функцию разомкнутой системы как произведение передаточных функций объекта и фильтра:
Подставляя (3.1) и (3.2) в (3.3), получаем передаточную функцию разомкнутой системы, выраженную через физические параметры:
Передаточная функция замкнутой системы определяется из передаточной функции разомкнутой системы как:
Подставляя (3.4) в (3.5), получаем передаточную функцию замкнутой системы, выраженную через физические параметры:
Знаменатель полученного выражения является характеристическим уравнением замкнутой системы, выраженным через физические параметры:
С другой стороны, характеристическое уравнение замкнутой системы можно выразить через желаемые корни:
Здесь уравнение главных корней имеет вид:
А уравнение дополнительных корней имеет вид:
Подставляя (3.9) и (3.10) в (3.8), получаем:
Приравнивая коэффициенты при одинаковых степенях правых частей уравнений (3.7) и (3.11), получаем систему:
В этой системе 3 известных нам величины (в техническом задании заданы: Решая систему (3.12), находим:
Подставляя (3.13) в (3.1) и (3.6), получаем передаточные функции фильтра и замкнутой системы зависящими от параметра
Исследовательская часть Путём варьирования параметра Переходный процесс, — по определению, — реакция системы на единичное ступенчатое входное воздействия. Для построения графика переходного процесса необходимо умножить передаточную функцию (3.15) замкнутой системы на величину
Выражение (3.16) получено при условии отсутствия внешнего возмущения ( Построим график переходного процесса замкнутой системы (график функции
 
Рисунок 3.1: Переходный процесс замкнутой системы при
 
Рисунок 3.2: Переходный процесс замкнутой системы при

Рисунок 3.3: Переходный процесс замкнутой системы при

Рисунок 3.4: Переходный процесс замкнутой системы при

Рисунок 3.5: Переходный процесс замкнутой системы при
Рисунок 3.6: Переходный процесс замкнутой системы при

Рисунок 3.7: Переходный процесс замкнутой системы при

Рисунок 3.8: Переходный процесс замкнутой системы при

Рисунок 3.9: Переходный процесс замкнутой системы при

Рисунок 3.10: Переходный процесс замкнутой системы при
При всех рассмотренных значениях Сведём полученные значения перерегулирования
Таблица 3.1: Экспериментальная зависимость Обозначив данные точки на плоскости

Рисунок 3.11: Экспериментальная и аппроксимирующая её зависимости Минимизируя полученную функцию
Подставляя (3.18) в (3.14) и (3.15), получаем вид оптимальных передаточных функций фильтра и замкнутой системы:
Расчётно-графическая часть Построим графики переходных процессов в замкнутой системе и фильтре при значениях варьируемого параметра Общее Структурная схема цифрового фильтра изображена на рисунке 4.1: Рисунок 4.1: Структурная схема цифрового фильтра в составе системы управления. Заданный в техническом задании метод цифровой реализации фильтра с общей передаточной функцией вида (3.1), где числовые коэффициенты определены (3.13) и (3.25), предполагает численное решение дифференциального уравнения
Решение же дифференциального уравнения (4.1), по существу, сводится к решению вспомогательного дифференциального уравнения с промежуточной переменной
которому соответствует промежуточная передаточная функция
Имея решение по
Решение
Характеристическое уравнение дифференциального уравнения (4.2):
Т.к. корни действительные, то общее решение однородного уравнения, соответствующего уравнению (4.2), имеет вид:
Частное решение уравнения (4.2) зависит от вида внешнего возмущения
При такой форме входного возмущения частное решение уравнения (4.2) можно искать в виде:
Подставляя (4.9) и (4.8) в (4.2) и приравнивая коэффициенты при одинаковых степенях
Решая (4.10), находим:
Подставляя (4.9) и (4.7) в (4.5), получаем:
Подставляя в первые два уравнения (4.12) начальные условия (
Решая (4.13), находим коэффициенты
Полученные выше соотношения позволяют построить алгоритм вычисления выхода 1. Из предыдущих шагов известны 2. По заданному в техническом задании алгоритму вычисляем приближённые значения производных по входу 3. По (4.11) вычисляем 4. По (4.14) вычисляем 5. По (4.12) вычисляем 6. По уравнению (4.4) вычисляем искомое значение
Для проверки корректности полученного алгоритма, построим по нему график переходного процесса в цифровом фильтре при шаге Сплошной линией обозначим график переходного процесса в аналоговом фильтре, точками — график переходного процесса в цифровом фильтре. Выбор шага дискретизации С помощью модели, полученной в предыдущем пункте, построим график переходного процесса в замкнутой системе с цифровым фильтром в сравнении с графиком переходного процесса в замкнутой системе с аналоговым фильтром при отсутствии внешнего возмущения ( · Среднеквадратичное отклонение
· Перерегулирование
· Время переходного процесса При построениях:
Жирными точками — график переходного процесса в замкнутой системе с цифровым фильтром, работающем по полуаналитическому интерполяционному методу
Жирными треугольниками — график переходного процесса в замкнутой системе с цифровым фильтром, работающем по полуаналитическому экстраполяционному методу
Рисунок 4.5: Переходный процесс в замкнутой системе при
Рисунок 4.6: Переходный процесс в замкнутой системе при
Рисунок 4.7: Переходный процесс в замкнутой системе при
Рисунок 4.8: Переходный процесс в замкнутой системе при
Рисунок 4.9: Переходный процесс в замкнутой системе при
Занесем результаты в таблицу:
Таблица 4.1: Характеристики переходного процесса при различных значениях Выберем следующие значения Интерполяционный метод: Экстерполяционный метод: Влияние запаздывания Выясним, какое влияние на характер переходного процесса в замкнутой системе с цифровым фильтром оказывает величина запаздывания Обозначать графики так же будем в соответствии с ранее принятым правилом .
Рисунок 4.10: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.11: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.12: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.13: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.14: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.15: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Рисунок 4.16: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Рисунок 4.17: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Рисунок 4.18: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Таблица 4.2: Характеристики переходного процесса при различных значениях Для обоих методов увеличение запаздывания увеличивает среднеквадратичное отклонение и перерегулировние.
Выводы · Для обеспечения степени устойчивости · Передаточная функция замкнутой системы : · Параметр o Пытаясь получить минимальную статическую ошибку. В этом случае o Пытаясь получить минимальное перерегулирование. В этом случае · Длительность переходного процесса составляет 0.263 с; это значение укладывется в 0.4 с, установленные в техническом задании. · Система с цифровым фильтром была построена с использованием двух методов: o интерполяционного полуаналитического метода с обрывом ряда Тейлора на второй производной o экстраполяционного полуаналитического метода с обрывом ряда Тейлора на второй производной · Исходя из условия 3% верхней границы среднеквадратичного коэффициента отклонения выбраны шаги: o Для интерполяционного метода: o Для экстраполяционного метода: · Интерполяционный метод требует длинну шага меньше, чем экстраполяционный, для достижения одной и той же верхней границы среднеквадратичного коэффициента отклонения. Однако на всех рассмотренных шагах у интерполяционного метода лучше перерегулирование, и он более устойчив. На точность построенной системы с цифровым фильтром существенно влияет запаздывание. При его увеличении, увеличиваются среднеквадратичный коэффициент отклонения и перерегулирование.
Список использованной литературы 1. Боевкин В.И. Проектирование одноконтурных систем управления с цифровым фильтром: учебное пособие по курсу "Управление в технических системах". — М.: МГТУ, 1996. 2. Солодовников В.В., Плотников В.Н., Яковлев А.В. Теория автоматического управления техническими системами. — М.: МГТУ, 1993. 3. Белодедов М.В. Методы проектирования цифровых фильтров: учебное пособие. — Волгоград: ВГУ, 2004. Цель работы Спроектировать цифровую систему управления с заданным быстродействием для объекта с известной передаточной функцией. 2 Техническое задание Назначение системы управления Система предназначена для отслеживания входного сигнала |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-05-08; Просмотров: 289; Нарушение авторского права страницы
 и компенсации внешнего возмущения
и компенсации внешнего возмущения  .
. , где:
, где: .
. .
.
 .
. , где:
, где: — уравнение главных корней,
— уравнение главных корней, — уравнение дополнительных корней,
— уравнение дополнительных корней, .
.
 . (3.3)
. (3.3) . (3.4)
. (3.4) . (3.5)
. (3.5) , откуда после упрощения:
, откуда после упрощения: . (3.6)
. (3.6) . (3.7)
. (3.7) , откуда после упрощения:
, откуда после упрощения: . (3.11)
. (3.11)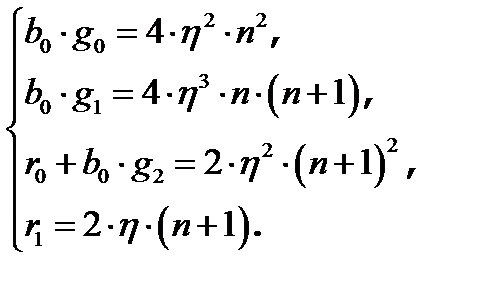 (3.12)
(3.12) ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ). Т.к. в системе 4 уравнения, найти мы можем лишь 4 из 5и неизвестных величин, а оставшуюся, — пусть это будет параметр
). Т.к. в системе 4 уравнения, найти мы можем лишь 4 из 5и неизвестных величин, а оставшуюся, — пусть это будет параметр  (3.13)
(3.13) , (3.14)
, (3.14) . (3.15)
. (3.15) , при котором перерегулирование
, при котором перерегулирование  в переходном процессе замкнутой системы минимально.
в переходном процессе замкнутой системы минимально. (подача единичного ступенчатого входного воздействия) и применить к полученному выражению обратное преобразование Лапласа. В результате мы получим значение выходного сигнала
(подача единичного ступенчатого входного воздействия) и применить к полученному выражению обратное преобразование Лапласа. В результате мы получим значение выходного сигнала  , — реакцию системы, — как функцию времени. Сделаем это:
, — реакцию системы, — как функцию времени. Сделаем это: , откуда после расчёта:
, откуда после расчёта: (3.16)
(3.16) ).
). , описываемой выражением (3.16)) при 10 экспериментальных значениях
, описываемой выражением (3.16)) при 10 экспериментальных значениях  -того) полученного графика определим перерегулирование
-того) полученного графика определим перерегулирование  , итак:
, итак: .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
,  .
. ,
,  ,
, 
 устоявшееся значение переходного процесса
устоявшееся значение переходного процесса  , т.к. входное воздействие является единичным ступенчатым, и, как видно из (3.16),
, т.к. входное воздействие является единичным ступенчатым, и, как видно из (3.16),  .
. в таблицу:
в таблицу:

 , построим по ним аппроксимирующую функцию
, построим по ним аппроксимирующую функцию  :
:
 .
. , находим оптимальное значение параметра
, находим оптимальное значение параметра  равным
равным (3.18)
(3.18) ; (3.19)
; (3.19) . (3.20)
. (3.20) ,
,  и
и  .
. . (4.1)
. (4.1) :
: , (4.2)
, (4.2) . (4.3)
. (4.3) , которое имеет вид:
, которое имеет вид: . (4.4)
. (4.4) уравнения (4.2) на шаге
уравнения (4.2) на шаге  с заданными начальными условиями
с заданными начальными условиями  и
и  можно представить в виде:
можно представить в виде: , где: (4.5)
, где: (4.5) — общее решение однородного уравнения, соответствующего уравнению (4.2),
— общее решение однородного уравнения, соответствующего уравнению (4.2), — частное решение уравнения (4.2).
— частное решение уравнения (4.2). , его корни:
, его корни: ,
,  (4.6)
(4.6) , где (4.7)
, где (4.7) ,
,  — константы, определяемые начальными условиями.
— константы, определяемые начальными условиями. , которое можно представить в виде ряда Тейлора:
, которое можно представить в виде ряда Тейлора: . (4.8)
. (4.8) (4.9)
(4.9) до второго порядка включительно, получаем систему:
до второго порядка включительно, получаем систему: (4.10)
(4.10) (4.11)
(4.11) (4.12)
(4.12) ), получаем систему:
), получаем систему: (4.13)
(4.13) (4.14)
(4.14) фильтра на шаге
фильтра на шаге  :
: ,
,  ,
,  а также измеренная величина
а также измеренная величина  .
. и
и  .
. ,
,  и
и  .
. и
и  .
. ,
,  и
и  .
. выхода фильтра.
выхода фильтра. на количестве отсчётов
на количестве отсчётов  и сравним его с графиком переходного процесса в аналоговом фильтре.
и сравним его с графиком переходного процесса в аналоговом фильтре. ) и запаздывания в цифровом фильтре (
) и запаздывания в цифровом фильтре (  ) при различных шагах дискретизации. На вход системы подадим единичное ступенчатое воздействие (
) при различных шагах дискретизации. На вход системы подадим единичное ступенчатое воздействие (  при
при  ). Построение будем вести на интервале времени от 0 до 0.6 (которому соответствует интервал отсчётов от 0 до
). Построение будем вести на интервале времени от 0 до 0.6 (которому соответствует интервал отсчётов от 0 до  ), к концу которого переходный процесс гарантированно закончится. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим:
), к концу которого переходный процесс гарантированно закончится. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим: от переходного процесса в замкнутой системе с аналоговым фильтром по формуле:
от переходного процесса в замкнутой системе с аналоговым фильтром по формуле: , где: (4.19)
, где: (4.19) — функция выхода замкнутой системы с аналоговым фильтром, определённая выражением (3.16),
— функция выхода замкнутой системы с аналоговым фильтром, определённая выражением (3.16), — её устоявшееся (достигнутое к десятой секунде) значение,
— её устоявшееся (достигнутое к десятой секунде) значение, — n-ый отсчёт функции выхода замкнутой системы с цифровым фильтром, определённой моделью, построенной в предыдущем пункте.
— n-ый отсчёт функции выхода замкнутой системы с цифровым фильтром, определённой моделью, построенной в предыдущем пункте. , как:
, как: . (4.20)
. (4.20) , как момент вхождения переходного процесса в пятипроцентный
, как момент вхождения переходного процесса в пятипроцентный  -коридор своего устоявшегося значения.
-коридор своего устоявшегося значения. Сплошной линией будем обозначать график переходного процесса в замкнутой системе с аналоговым фильтром.
Сплошной линией будем обозначать график переходного процесса в замкнутой системе с аналоговым фильтром.


 ,
,  .
.
 ,
, 
 ,
, 
 ,
, 
 ,
, 




 .
. исходя из условия
исходя из условия  :
: , при этом
, при этом 
 , при этом
, при этом 
 . Для этого построим график переходного процесса в замкнутой системе с цифровым фильтром в сравнении с графиком переходного процесса в замкнутой системе с аналоговым фильтром при отсутствии внешнего возмущения (
. Для этого построим график переходного процесса в замкнутой системе с цифровым фильтром в сравнении с графиком переходного процесса в замкнутой системе с аналоговым фильтром при отсутствии внешнего возмущения (  и разных значениях запаздывания в цифровом фильтре. Как и прежде, на вход системы подадим единичное ступенчатое воздействие, а построение будем вести на интервале времени от 0 до 0.6. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим характеристики
и разных значениях запаздывания в цифровом фильтре. Как и прежде, на вход системы подадим единичное ступенчатое воздействие, а построение будем вести на интервале времени от 0 до 0.6. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим характеристики  ,
,  ,
,  методами, описанными в предыдущем пункте.
методами, описанными в предыдущем пункте.
 ,
,  .
.
 .
.
 .
.
 .
.

 ,
, 





 .
.

 можно было искать из разных соображений:
можно было искать из разных соображений: , а статическая ошибка отсутствует.
, а статическая ошибка отсутствует. , и статическая ошибка равна -0.349. Это значение и было выбрано, в согласии с техническим заданием.
, и статическая ошибка равна -0.349. Это значение и было выбрано, в согласии с техническим заданием.
