
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структурная схема системы управления
Рисунок 2.1: Структурная схема системы управления. Исходные данные Передаточная функция объекта:
Передаточная функция фильтра:
2.4 Динамические требования к системе управления Длительность переходного процесса:
Степень устойчивости системы:
Характеристическое уравнение замкнутой системы:
Метод перехода от аналогового фильтра к цифровому Полуаналитический с вычислением производных по входу: интерполяционным методом: и экстраполяционным методом:
Проектирование аналоговой системы управления Теоретическая часть Найдём параметры аналогового фильтра. Передаточная функция фильтра, выраженная через физические параметры:
Передаточная функция объекта, выраженная через физические параметры:
Найдём передаточную функцию разомкнутой системы как произведение передаточных функций объекта и фильтра:
Подставляя (3.1) и (3.2) в (3.3), получаем передаточную функцию разомкнутой системы, выраженную через физические параметры:
Передаточная функция замкнутой системы определяется из передаточной функции разомкнутой системы как:
Подставляя (3.4) в (3.5), получаем передаточную функцию замкнутой системы, выраженную через физические параметры:
Знаменатель полученного выражения является характеристическим уравнением замкнутой системы, выраженным через физические параметры:
С другой стороны, характеристическое уравнение замкнутой системы можно выразить через желаемые корни:
Здесь уравнение главных корней имеет вид:
А уравнение дополнительных корней имеет вид:
Подставляя (3.9) и (3.10) в (3.8), получаем:
Приравнивая коэффициенты при одинаковых степенях правых частей уравнений (3.7) и (3.11), получаем систему:
В этой системе 3 известных нам величины (в техническом задании заданы: Решая систему (3.12), находим:
Подставляя (3.13) в (3.1) и (3.6), получаем передаточные функции фильтра и замкнутой системы зависящими от параметра
Исследовательская часть Путём варьирования параметра Переходный процесс, — по определению, — реакция системы на единичное ступенчатое входное воздействия. Для построения графика переходного процесса необходимо умножить передаточную функцию (3.15) замкнутой системы на величину
Выражение (3.16) получено при условии отсутствия внешнего возмущения ( Построим график переходного процесса замкнутой системы (график функции
 
Рисунок 3.1: Переходный процесс замкнутой системы при
 
Рисунок 3.2: Переходный процесс замкнутой системы при

Рисунок 3.3: Переходный процесс замкнутой системы при

Рисунок 3.4: Переходный процесс замкнутой системы при

Рисунок 3.5: Переходный процесс замкнутой системы при
Рисунок 3.6: Переходный процесс замкнутой системы при

Рисунок 3.7: Переходный процесс замкнутой системы при

Рисунок 3.8: Переходный процесс замкнутой системы при

Рисунок 3.9: Переходный процесс замкнутой системы при

Рисунок 3.10: Переходный процесс замкнутой системы при
При всех рассмотренных значениях Сведём полученные значения перерегулирования
Таблица 3.1: Экспериментальная зависимость Обозначив данные точки на плоскости

Рисунок 3.11: Экспериментальная и аппроксимирующая её зависимости Минимизируя полученную функцию
Подставляя (3.18) в (3.14) и (3.15), получаем вид оптимальных передаточных функций фильтра и замкнутой системы:
|
Последнее изменение этой страницы: 2019-05-08; Просмотров: 219; Нарушение авторского права страницы
 , где:
, где: .
. .
.
 .
. , где:
, где: — уравнение главных корней,
— уравнение главных корней, — уравнение дополнительных корней,
— уравнение дополнительных корней, .
.
 . (3.3)
. (3.3)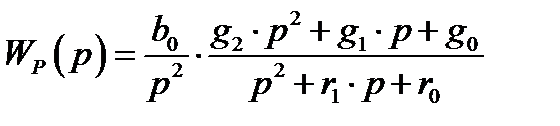 . (3.4)
. (3.4)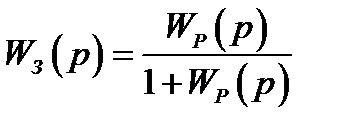 . (3.5)
. (3.5)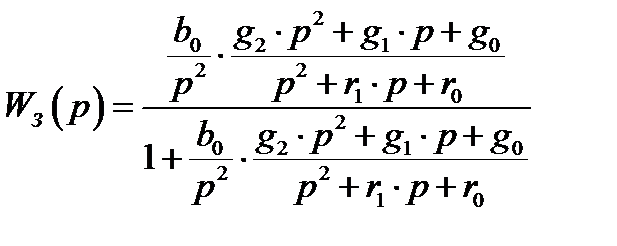 , откуда после упрощения:
, откуда после упрощения: . (3.6)
. (3.6) . (3.7)
. (3.7) , откуда после упрощения:
, откуда после упрощения: . (3.11)
. (3.11)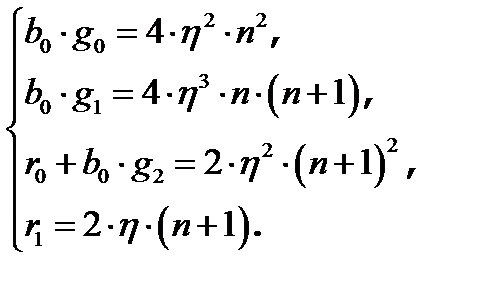 (3.12)
(3.12) ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ). Т.к. в системе 4 уравнения, найти мы можем лишь 4 из 5и неизвестных величин, а оставшуюся, — пусть это будет параметр
). Т.к. в системе 4 уравнения, найти мы можем лишь 4 из 5и неизвестных величин, а оставшуюся, — пусть это будет параметр  (3.13)
(3.13) , (3.14)
, (3.14) . (3.15)
. (3.15) , при котором перерегулирование
, при котором перерегулирование  в переходном процессе замкнутой системы минимально.
в переходном процессе замкнутой системы минимально. (подача единичного ступенчатого входного воздействия) и применить к полученному выражению обратное преобразование Лапласа. В результате мы получим значение выходного сигнала
(подача единичного ступенчатого входного воздействия) и применить к полученному выражению обратное преобразование Лапласа. В результате мы получим значение выходного сигнала  , — реакцию системы, — как функцию времени. Сделаем это:
, — реакцию системы, — как функцию времени. Сделаем это: , откуда после расчёта:
, откуда после расчёта: (3.16)
(3.16) ).
). , описываемой выражением (3.16)) при 10 экспериментальных значениях
, описываемой выражением (3.16)) при 10 экспериментальных значениях  -того) полученного графика определим перерегулирование
-того) полученного графика определим перерегулирование  , итак:
, итак: .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
, 
 .
. ,
,  ,
,  .
. ,
,  ,
,  .
. ,
,  ,
, 
 устоявшееся значение переходного процесса
устоявшееся значение переходного процесса  , т.к. входное воздействие является единичным ступенчатым, и, как видно из (3.16),
, т.к. входное воздействие является единичным ступенчатым, и, как видно из (3.16),  .
. в таблицу:
в таблицу:

 , построим по ним аппроксимирующую функцию
, построим по ним аппроксимирующую функцию  :
:
 .
. , находим оптимальное значение параметра
, находим оптимальное значение параметра  равным
равным (3.18)
(3.18) ; (3.19)
; (3.19) . (3.20)
. (3.20)