
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Для интерполяционного метода ⇐ ПредыдущаяСтр 4 из 4
Алгоритм:
Посчитаем среднеквадратичное отклонение
Алгоритм оправдал наши ожидания: построенный по нему цифровой фильтр достаточно точно повторил свой аналоговый прототип. Для экстраполяционного метода Алгоритм:
Рисунок 4.3: Переходные процессы в аналоговом и цифровом ( Посчитаем среднеквадратичное отклонение
Алгоритм оправдал наши ожидания: построенный по нему цифровой фильтр достаточно точно повторил свой аналоговый прототип.
Замкнутая система с цифровым фильтром Для формирования алгоритма моделирования замкнутой системы с цифровым фильтром, рассмотрим временную диаграмму: Рисунок 4.4: Временная диаграмма цифрового фильтра в составе замкнутой системы. Рассмотрим момент времени При отсутствии помех (
На интервале времени от
На интервале времени от
Для завершения построения модели осталось добавить к полученным уравнениям ещё одно, уравнение обратной связи:
Выбор шага дискретизации С помощью модели, полученной в предыдущем пункте, построим график переходного процесса в замкнутой системе с цифровым фильтром в сравнении с графиком переходного процесса в замкнутой системе с аналоговым фильтром при отсутствии внешнего возмущения ( · Среднеквадратичное отклонение
· Перерегулирование
· Время переходного процесса При построениях:
Жирными точками — график переходного процесса в замкнутой системе с цифровым фильтром, работающем по полуаналитическому интерполяционному методу
Жирными треугольниками — график переходного процесса в замкнутой системе с цифровым фильтром, работающем по полуаналитическому экстраполяционному методу
Рисунок 4.5: Переходный процесс в замкнутой системе при
Рисунок 4.6: Переходный процесс в замкнутой системе при
Рисунок 4.7: Переходный процесс в замкнутой системе при
Рисунок 4.8: Переходный процесс в замкнутой системе при
Рисунок 4.9: Переходный процесс в замкнутой системе при
Занесем результаты в таблицу:
Таблица 4.1: Характеристики переходного процесса при различных значениях Выберем следующие значения Интерполяционный метод: Экстерполяционный метод: Влияние запаздывания Выясним, какое влияние на характер переходного процесса в замкнутой системе с цифровым фильтром оказывает величина запаздывания Обозначать графики так же будем в соответствии с ранее принятым правилом .
Рисунок 4.10: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.11: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.12: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.13: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.14: Переходный процесс в замкнутой системе для интерполяционного метода при при
Рисунок 4.15: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Рисунок 4.16: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Рисунок 4.17: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Рисунок 4.18: Переходный процесс в замкнутой системе для экстерполяционного метода при при
Таблица 4.2: Характеристики переходного процесса при различных значениях Для обоих методов увеличение запаздывания увеличивает среднеквадратичное отклонение и перерегулировние.
Выводы · Для обеспечения степени устойчивости · Передаточная функция замкнутой системы : · Параметр o Пытаясь получить минимальную статическую ошибку. В этом случае o Пытаясь получить минимальное перерегулирование. В этом случае · Длительность переходного процесса составляет 0.263 с; это значение укладывется в 0.4 с, установленные в техническом задании. · Система с цифровым фильтром была построена с использованием двух методов: o интерполяционного полуаналитического метода с обрывом ряда Тейлора на второй производной o экстраполяционного полуаналитического метода с обрывом ряда Тейлора на второй производной · Исходя из условия 3% верхней границы среднеквадратичного коэффициента отклонения выбраны шаги: o Для интерполяционного метода: o Для экстраполяционного метода: · Интерполяционный метод требует длинну шага меньше, чем экстраполяционный, для достижения одной и той же верхней границы среднеквадратичного коэффициента отклонения. Однако на всех рассмотренных шагах у интерполяционного метода лучше перерегулирование, и он более устойчив. На точность построенной системы с цифровым фильтром существенно влияет запаздывание. При его увеличении, увеличиваются среднеквадратичный коэффициент отклонения и перерегулирование.
Список использованной литературы 1. Боевкин В.И. Проектирование одноконтурных систем управления с цифровым фильтром: учебное пособие по курсу "Управление в технических системах". — М.: МГТУ, 1996. 2. Солодовников В.В., Плотников В.Н., Яковлев А.В. Теория автоматического управления техническими системами. — М.: МГТУ, 1993. 3. Белодедов М.В. Методы проектирования цифровых фильтров: учебное пособие. — Волгоград: ВГУ, 2004. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-05-08; Просмотров: 211; Нарушение авторского права страницы


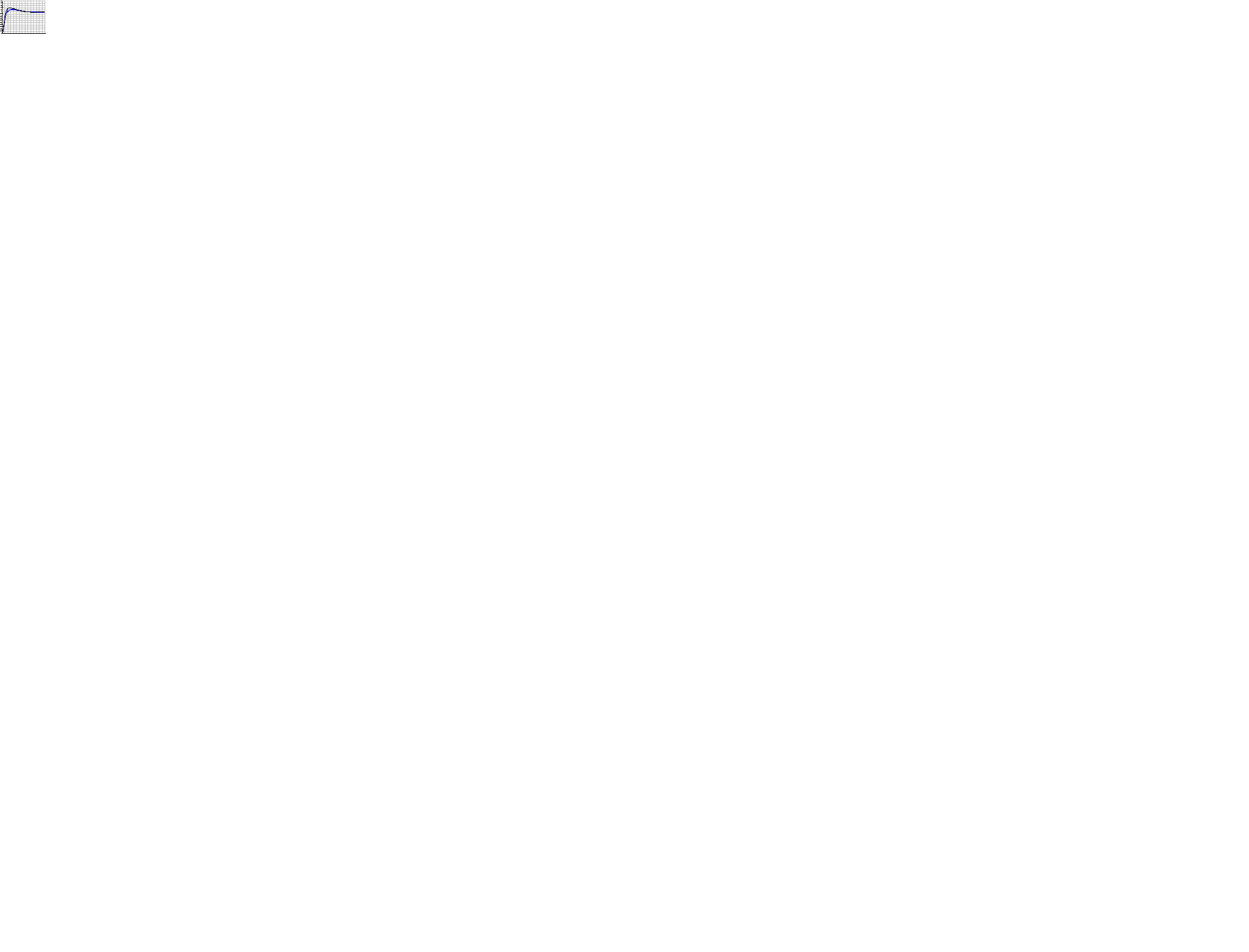
 Рисунок 4.2: Переходные процессы в аналоговом и цифровом (
Рисунок 4.2: Переходные процессы в аналоговом и цифровом (  ) фильтрах для интерполяционного метода.
) фильтрах для интерполяционного метода. переходного процесса в цифровом фильтре от переходного процесса в аналоговом фильтре:
переходного процесса в цифровом фильтре от переходного процесса в аналоговом фильтре: . Здесь:
. Здесь: — функция выхода аналогового фильтра, определённая выражением (3.26),
— функция выхода аналогового фильтра, определённая выражением (3.26), — её устоявшееся (достигнутое к десятой секунде) значение,
— её устоявшееся (достигнутое к десятой секунде) значение, — n-ый отсчёт функции выхода цифрового фильтра, определённой страницу назад сформированным алгоритмом.
— n-ый отсчёт функции выхода цифрового фильтра, определённой страницу назад сформированным алгоритмом.



 . В этот момент АЦП измеряет входной сигнал
. В этот момент АЦП измеряет входной сигнал  . В памяти ЦВМ при этом хранятся значения
. В памяти ЦВМ при этом хранятся значения  и
и  , а так же вычисленные на прошлом шаге промежуточные величины
, а так же вычисленные на прошлом шаге промежуточные величины  и
и  . По этим параметрам (с учётом только что снятых с АЦП показаний) ЦВМ вычисляет значение
. По этим параметрам (с учётом только что снятых с АЦП показаний) ЦВМ вычисляет значение  в соответствии с алгоритмом, описанном в предыдущем пункте. Но выставлено на ЦАП оно будет лишь в момент времени
в соответствии с алгоритмом, описанном в предыдущем пункте. Но выставлено на ЦАП оно будет лишь в момент времени  , где
, где  , — запаздывание,
, — запаздывание,  — складывается из чистого запаздывания (время срабатывания АЦП и ЦАП и время собственно вычисления) и введённого при необходимости искусственного запаздывания.
— складывается из чистого запаздывания (время срабатывания АЦП и ЦАП и время собственно вычисления) и введённого при необходимости искусственного запаздывания. ), уравнение объекта в произвольный момент времени имеет вид:
), уравнение объекта в произвольный момент времени имеет вид: . (4.15)
. (4.15) до
до  величина
величина  постоянна и равна
постоянна и равна  , и с помощью формул Тейлора мы получаем:
, и с помощью формул Тейлора мы получаем: (4.16)
(4.16) до
до  величина
величина  , тогда с помощью (4.16) мы вычисляем значения следующего отсчёта:
, тогда с помощью (4.16) мы вычисляем значения следующего отсчёта: (4.17)
(4.17) . (4.18)
. (4.18) ) при различных шагах дискретизации. На вход системы подадим единичное ступенчатое воздействие (
) при различных шагах дискретизации. На вход системы подадим единичное ступенчатое воздействие (  при
при  ). Построение будем вести на интервале времени от 0 до 0.6 (которому соответствует интервал отсчётов от 0 до
). Построение будем вести на интервале времени от 0 до 0.6 (которому соответствует интервал отсчётов от 0 до  ), к концу которого переходный процесс гарантированно закончится. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим:
), к концу которого переходный процесс гарантированно закончится. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим: , где: (4.19)
, где: (4.19) — функция выхода замкнутой системы с аналоговым фильтром, определённая выражением (3.16),
— функция выхода замкнутой системы с аналоговым фильтром, определённая выражением (3.16), — её устоявшееся (достигнутое к десятой секунде) значение,
— её устоявшееся (достигнутое к десятой секунде) значение, — n-ый отсчёт функции выхода замкнутой системы с цифровым фильтром, определённой моделью, построенной в предыдущем пункте.
— n-ый отсчёт функции выхода замкнутой системы с цифровым фильтром, определённой моделью, построенной в предыдущем пункте. , как:
, как: . (4.20)
. (4.20) , как момент вхождения переходного процесса в пятипроцентный
, как момент вхождения переходного процесса в пятипроцентный  -коридор своего устоявшегося значения.
-коридор своего устоявшегося значения. Сплошной линией будем обозначать график переходного процесса в замкнутой системе с аналоговым фильтром.
Сплошной линией будем обозначать график переходного процесса в замкнутой системе с аналоговым фильтром.


 ,
,  .
.
 ,
, 
 ,
, 
 ,
, 
 ,
, 




 .
. исходя из условия
исходя из условия  :
: , при этом
, при этом 
 , при этом
, при этом 
 . Для этого построим график переходного процесса в замкнутой системе с цифровым фильтром в сравнении с графиком переходного процесса в замкнутой системе с аналоговым фильтром при отсутствии внешнего возмущения (
. Для этого построим график переходного процесса в замкнутой системе с цифровым фильтром в сравнении с графиком переходного процесса в замкнутой системе с аналоговым фильтром при отсутствии внешнего возмущения (  и разных значениях запаздывания в цифровом фильтре. Как и прежде, на вход системы подадим единичное ступенчатое воздействие, а построение будем вести на интервале времени от 0 до 0.6. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим характеристики
и разных значениях запаздывания в цифровом фильтре. Как и прежде, на вход системы подадим единичное ступенчатое воздействие, а построение будем вести на интервале времени от 0 до 0.6. Для каждого построенного переходного процесса в замкнутой системе с цифровым фильтром определим характеристики  ,
,  ,
,  методами, описанными в предыдущем пункте.
методами, описанными в предыдущем пункте.
 ,
,  .
.
 .
.
 .
.
 .
.

 ,
, 





 .
. и минимального перерегулирования в переходном процессе заданного объекта, передаточная функция аналогового фильтра должна иметь вид:
и минимального перерегулирования в переходном процессе заданного объекта, передаточная функция аналогового фильтра должна иметь вид:

 можно было искать из разных соображений:
можно было искать из разных соображений: , а статическая ошибка отсутствует.
, а статическая ошибка отсутствует. , и статическая ошибка равна -0.349. Это значение и было выбрано, в согласии с техническим заданием.
, и статическая ошибка равна -0.349. Это значение и было выбрано, в согласии с техническим заданием.
