
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Безусловная минимизация функций многих переменных
Выпуклые множества и выпуклые функции. Пусть Еп - п-мерное евклидово пространство арифметических векторов
Пример 9.1. Показать, что множество точек Пусть
Выпуклость множества U ясна и из рис. 9.1. Так как U - круг, то отрезок, соединяющий любые две точки Проверка условия (2.1) в большинстве случаев требует громоздких выкладок, поэтому на практике при исследовании выпуклости множеств в пространствах Е2 и Е3 часто используют геометрические иллюстрации, подобные рис. 9.1. Функция f( x), заданная на выпуклом множестве U, называется выпуклой на этом множестве, если для любых точек
На практике обычно используют следующий критерий выпуклости функции: Если f(х) - дважды дифференцируемая на выпуклом множестве U функция и матрица ее вторых производных (гессиан) положительно определена при всех x Î U, то функция f(х) является выпуклой на множестве U. это утверждение можно сформулировать в более удобном для проверки виде: Если все угловые миноры матрицы, f" (х) положительны при хÎ U, то функция f(х) выпукла на множестве U. Выпуклые функции играют большую роль во многих вопросах оптимизации в связи с тем, что всякий локальный минимум выпуклой функции является одновременно и глобальным. Пример 9.2. Выяснить, является ли функция Запишем матрицу вторых производных.
Найдя угловые миноры этой матрицы
убеждаемся, что Во многих задачах оптимизации рассматриваются квадратичные функции, т. е. функции вида Если положить
где Градиент и матрица вторых производных функции (9.3) равны
Таким образом, для того чтобы функция (2.3) была выпуклой, достаточно, чтобы матрица Q была положительно определена. Пример 9.3. Пусть а) Найти матрицу Q и вектор r в представлении (2.3) функции f(x). б) Найти градиент f’( x). в) Выяснить, является ли функция f(х) выпуклой. В данном случае
Используя найденные матрицу Q и векторr, запишем:
Найдем угловые миноры
Так как Постановка задачи минимизации функции п переменных Для решения задачи безусловной минимизации функции f(х) наиболее часто применяют приближенные методы, в основе которых лежит вычисление производных f(х) первого порядка. Такие методы обычно называют градиентными. В ряде других методов требуется вычисление не только первых, но и вторых производных функции f(х). Градиентные методы 9.2.1. Общая схема градиентного спуска. Как известно из курсов анализа, градиент скалярной функции f( x) в некоторой точке xk направлен в сторону наискорейшего возрастания функции и ортогонален линии уровня (поверхности постоянного значения функции f( x), проходящей через точку xk). Вектор, противоположный градиенту f’( xk, ), антиградиент, направлен в сторону наискорейшего убывания функции f( x). Выбирая в качестве направления спуска pk антиградиент функции f(x) в точке xk, мы приходим к итерационному процессу вида
В координатной форме этот процесс записывается следующим образом:
Все итерационные процессы, в которых направление движения на каждом шаге совпадает с антиградиентом (градиентом) функции, называются градиентными методами и отличаются друг от друга способами выбора шага ak. Существует много различных способов выбора ak, нонаиболее распространены два: первый называется методом с дроблением шага и связан с проверкой на каждой итерации некоторого неравенства (см. ниже неравенство (9.6)); во втором при переходе из точки xk, в точку x(k+1) функция 9.2.2. Градиентные методы с дроблением шага. Методы с постоянным шагом. Рассмотрим процесс (9.4). Первая проблема, с которой мы сталкиваемся при его реализации - это выбор шага ak. Достаточно малый шаг ak обеспечит убывание функции, т. е. выполнение неравенства:
но может привести к неприемлемо большому количеству итераций, необходимых для достижения точки минимума. С другой стороны, слишком большой шаг может вызвать неожиданный рост функции (невыполнение условия (9.6)) либо привести к колебаниям около точки минимума. Геометрически градиентный спуск с дроблением шага изображен на рис. 2.2. Здесь изображены линии уровня функции f( x), имеющей минимум в точке х*, причем
Рис.9.2. Схема градиентного спуска Это уравнение, в свою очередь, получается из дискретного соотношения (9.4) при α → 0, а сама итерационная схема (9.4) может рассматриваться как схема метода Эйлера для решения дифференциального уравнения 9.7). Заметим, что процедура проверки неравенства (9.6) на каждой итерации является довольно трудоемкой. Если известны некоторые параметры, характеризующие функцию f(х), можно использовать вариант метода (9.4) с постоянным на всех итерациях шагом, при котором функция f(х) заведомо монотонно убывает. Пусть, например, существует константа R такая, что неравенство
выполнено для любых х, у (т.е. функция удовлетворяет условию Липшица). Тогда достаточно взять
Если известна равномерная по х оценка М сверху максимального собственного числа матрицы f’(х), выполнение неравенства (2.6) обеспечивается выбором шага по формуле
При спуске с постоянным шагом трудоемкость каждой итерации минимальна (нужно вычислять только градиент f ’( xk )). Однако значения постоянных R, М обычно заранее неизвестны. 9.2.3.Алгоритм метода градиентного спуска с дроблением шага. Пусть f(х) - выпуклая дифференцируемая во всем пространстве Еп функция и требуется найти ее точку минимума х*. Выбрав произвольное начальное приближение
где величины
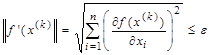
В качестве условия окончания вычислений обычно используется близость к нулю градиента
или
где e - заданное достаточно малое число, после чего полагают Если при некотором k условие (9.12) нарушается, то шаг Пример 9.4. Минимизироватьфункцию Выбрав начальное приближение
Таблица 9.1
Итак, х* » (-0, 301, -0, 163), f* » 0, 772. Для квадратичной функции (9.3) формула (9.11) принимает вид:
9.2.4. Метод наискорейшего спуска. Как показано выше, можно выбрать некоторую постоянную для всех итераций величину шага, обеспечивающую убывание функции f(х) от итерации к итерации. Однако обычно шаг при этом оказывается очень малым, что приводит к необходимости проводить большое количество итераций для достижения точки минимума. Поэтому методы спуска с переменным шагом являются более экономными. Процесс, на каждой итерации которого шаг α k выбирается из условия минимума функции f( x) в направлении движения, т. е.
называется методом наискорейшего спуска. В этом варианте градиентного спуска на каждой итерации требуется решать задачу одномерной минимизации (9.15). Разумеется, этот способ выбора α k, сложнее, чем рассмотренные ранее.
Рис. 9.3. Метод наискорейшего градиентного спуска Геометрическая интерпретация метода наискорейшего спуска представлена на рис. 9.3. В этом методе, в отличие от обычного градиентного спуска, направление движения из точки х(k), касается линии уровня в точке х(k+1). Последовательность точек
и поэтому
Реализация метода наискорейшего спуска предполагает решение на каждом шаге довольно трудоемкой вспомогательной задачи одномерной минимизации (9.15). Как правило, метод наискорейшего спуска, тем не менее, дает выигрыш в числе машинных операций, поскольку обеспечивает движение с самым выгодным шагом. В то же время решение задачи (9.15) связано с дополнительными вычислениями только самой функции f( x), тогда как основное машинное время тратится на вычисление ее градиента f ( x). Пример 9.5. Решить пример 2.4 методом наискорейшего спуска. Шаг 8. Положим
Для нахождения точки минимума функции
т.e. Шаг 2.
Минимизируем
т.e. Шаг 3.
Минимизируем
т.e. Если f( x) - квадратичная функция (2.3), то величинаα k может быть найдена в явном виде
Таким образом, для квадратичной функций метод наискорейшего спуска состоит в построении последовательности 9.2.7. Методы покоординатного спуска. Стремление уменьшить объем вычислительной работы, требуемой для осуществления одной итерации метода наискорейшего спуска, привело к созданию ряда других методов. Одним из них является метод покоординатного спуска. Пусть
где е1={l, 0, ..., 0} - единичный вектор оси х8. Следующая итерации состоит в вычислении точки х(2)по формуле
где е2 = {0, 1, 0, ..., 0} - единичный вектор оси х2 и т. д. Таким образом, в методе покоординатного спуска мы спускаемся по ломаной, состоящей из отрезков прямых, параллельных координатным осям (рис. 2.7).
Рис.9.7. Метод покоординатного спуска Спуск по всем п координатам составляет одну «внешнюю» итерацию. Пусть k - номер очередной внешней итерации, a s - номер той координаты, по которой производится спуск. Тогда рекуррентная формула, определяющая следующее приближение к точке минимума, запишется в следующем виде:
или, в координатной форме,
После s = n счетчик числа больших итераций k увеличивается на единицу, а s принимает значение, равное единице. Величина шага α k выбирается на каждой итерации аналогично тому, как это делалось в схемах, изложенных выше. Если α k = α постоянно, то имеем покоординатный спуск с постоянным шагом. Если же шаг α k выбирается из условия минимума функции
то мы получаем координатный аналог метода наискорейшего спуска, называемый обычно методом Гаусса (или Гаусса— Зейделя). |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 322; Нарушение авторского права страницы
 . Множество U Ì Еп называется выпуклым, если вместе с любыми двумя точками
. Множество U Ì Еп называется выпуклым, если вместе с любыми двумя точками  оно содержит и отрезок, соединяющий эти точки, т. е.
оно содержит и отрезок, соединяющий эти точки, т. е. для всех
для всех  (9.1)
(9.1) плоскости
плоскости  выпукло.
выпукло. и
и  , a
, a  - точка отрезка, соединяющего точки
- точка отрезка, соединяющего точки  и
и  . Покажем, что x Î U. Имеем:
. Покажем, что x Î U. Имеем: 

 Используя неравенства
Используя неравенства  (т.к.
(т.к.  ,
а также
,
а также 
 , т.е. x Î U
, т.е. x Î U
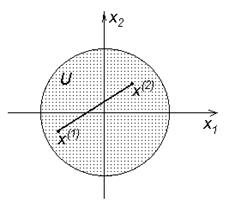 Рис.9.1.
Рис.9.1.
 справедливо неравенство
справедливо неравенство (9.2)
(9.2) выпуклой в пространстве Е2.
выпуклой в пространстве Е2. ,
, 
 при всех х, т. е. функция f(х) выпукла.
при всех х, т. е. функция f(х) выпукла.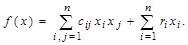
 то получим симметрическую матрицу
то получим симметрическую матрицу  , с помощью которой можно представить квадратичную функцию в виде
, с помощью которой можно представить квадратичную функцию в виде (9.3)
(9.3) ,
,  - векторы-столбцы.
- векторы-столбцы. .
. .
. , поэтому:
, поэтому: 

 матрицы
матрицы  :
: 
 то функция f( x) выпукла.
то функция f( x) выпукла. на множестве U Ì Еп не отличается от постановки в одномерном случае. Если U = Еп, то говорят о безусловной минимизации функции f( x).
на множестве U Ì Еп не отличается от постановки в одномерном случае. Если U = Еп, то говорят о безусловной минимизации функции f( x). (9.4)
(9.4) (9.5)
(9.5) минимизируется по a - метод наискорейшего спуска. Соответствующие итерационные процессы рассматриваются далее.
минимизируется по a - метод наискорейшего спуска. Соответствующие итерационные процессы рассматриваются далее. (9.6)
(9.6) и некоторая зигзагообразная траектория
и некоторая зигзагообразная траектория  , ортогональная в каждой точке
, ортогональная в каждой точке  соответствующим линиям уровня и приводящая из начальной точки х0 в точку минимума х*. Ломаная
соответствующим линиям уровня и приводящая из начальной точки х0 в точку минимума х*. Ломаная  (2.7)
(2.7)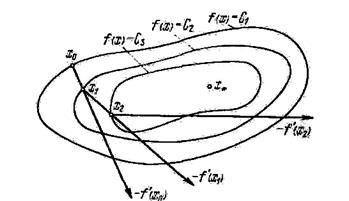
 (9.8)
(9.8) (9.9)
(9.9) (9.10)
(9.10) построим последовательность
построим последовательность (9.11)
(9.11) (параметрические шаги) выбираются достаточно малыми для того, чтобы выполнялось условие:
(параметрические шаги) выбираются достаточно малыми для того, чтобы выполнялось условие:  (9.12)
(9.12) т. е. выполнение неравенств
т. е. выполнение неравенств
 , (9.13)
, (9.13) .
. методом градиентного спуска, завершив вычисления при
методом градиентного спуска, завершив вычисления при 
 и
и  = 1, построим последовательность (9.11), записывая результаты вычислений в таблице 9.1.
= 1, построим последовательность (9.11), записывая результаты вычислений в таблице 9.1.



 (9.14)
(9.14) (9.15)
(9.15)
 , ... зигзагообразно приближается к точке минимума х*, причем звенья этого зигзага ортогональны между собой. В самом деле, шаг α выбирается из условия минимизации по α функции
, ... зигзагообразно приближается к точке минимума х*, причем звенья этого зигзага ортогональны между собой. В самом деле, шаг α выбирается из условия минимизации по α функции ,
,  .
.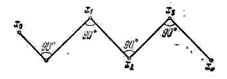 Рис.9.4.
Рис.9.4.
 , тогда
, тогда  .
.
 используем метод перебора:
используем метод перебора:  , откуда
, откуда  .
.

 :
:  , откуда
, откуда 

 :
:  ,
,  = (-0, 3045, -0, 1619),
= (-0, 3045, -0, 1619),  , поэтому требуемая точность достигнута и х* » (-0, 305, -0, 162), f* » 0, 772
, поэтому требуемая точность достигнута и х* » (-0, 305, -0, 162), f* » 0, 772 (9.16)
(9.16) по формулам (9.14), (9.16).
по формулам (9.14), (9.16). - начальное приближение. Вычислим частную производную по первой координате
- начальное приближение. Вычислим частную производную по первой координате  и примем
и примем ,
,  ,
, 


