|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОПИСАНИЕ ЛАБОРАТОРНОГО КОМПЛЕКСАСтр 1 из 9Следующая ⇒
ОГЛАВЛЕНИЕ Стр. Описание лабораторного комплекса…………………………………………… 4 Работа №1. Исследование трехфазного асинхронного электродвигателя с короткозамкнутым ротором………………………………………………….. 13 Работа №2. Программирование преобразователя частоты. Снятие характеристик разомкнутой системы ПЧ-АД………………………………… 17 Работа №3. Исследование режимов компенсации системы ПЧ-АД………... 25 Работа №4. Исследование замкнутой системы ПЧ-АД……………………… 31 Работа №5. Способы пуска и торможения асинхронного электродвигателя в системе ПЧ-АД…………………………………………... 39 Работа №6. Режим регулирования момента системы ПЧ-АД………………. 44 Работа №7. Компьютерное управление системой ПЧ-АД…………………... 50
Приложение А………………………………………………………………….. 54 Приложение Б…………………………………………………………………... 56 Приложение В………………………………………………………………….. 59
ОПИСАНИЕ ЛАБОРАТОРНОГО КОМПЛЕКСА Назначение комплекса
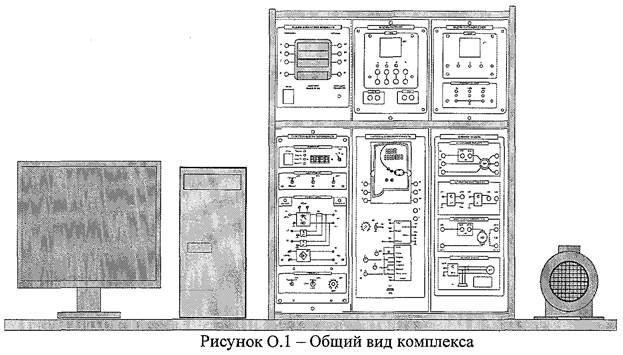
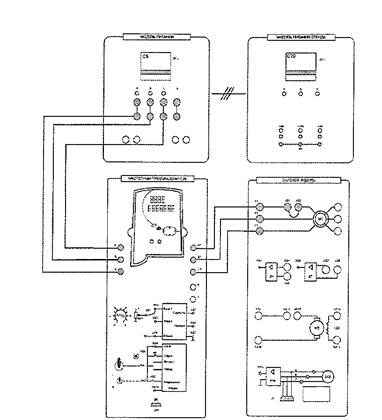
Лабораторный комплекс «Частотно-регулируемый электропривод» (в дальнейшем изложении комплекс) предназначен для обучения студентов различных специальностей средних специальных и высших учебных заведений, изучающих дисциплины «Электрический привод», «Системы управления электроприводов». Комплекс может быть использован также для обучения учащихся профессионально-технических училищ и слушателей отраслевых учебных центров повышения квалификации инженерно-технических работников. В состав комплекса входят (рисунок O.1): – модуль питания стенда; – модуль питания; – модуль измерителя мощности; – модуль силовой; – модуль преобразователя частоты; – модуль тиристорного преобразователя; – каркас 2x3; – электромашинный агрегат; – персональный компьютер; – методические указания; – техническое описание; – компакт-диск с программным обеспечением.
Далее рассматриваются краткие технические характеристики отдельных модулей комплекса.
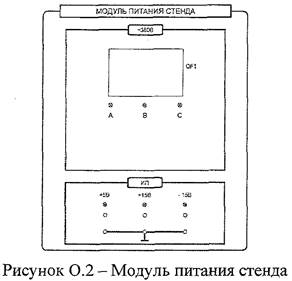
Модуль питания стенда Модуль питания стенда предназначен для ввода трехфазного напряжения 380В из сети в лабораторный комплекс, защиты комплекса от токов короткого замыкания, подачи силовых и низковольтных напряжений питания на модули стенда. Модуль содержит автоматический выключатель QF1, вторичный источник питания ±15В, +5В. Подключение стенда к источнику питания, подача силового и низковольтного напряжений на модули выполняется с помощью соединительных кабелей, подключаемых с тыльной стороны модуля. На лицевой части имеется индикация подачи силового напряжения по фазам А, В и С, а также низковольтных напряжений питания +5В, +15В и -15В. Кроме этого возможен контроль и низковольтных напряжений с лицевой панели (выведены соответствующие клеммы напряжений и общего провода). Внешний вид модуля приведен на рисунке О.2.
Модуль питания Модуль питания предназначен для подачи трехфазного напряжения 380В на модули при наборе схемы, защиты подключенных модулей от токов короткого замыкания. На лицевой панели модуля расположен автоматический выключатель QF2, клеммы трехфазного напряжения А, В, С, N (клеммы продублированы), индикация наличия фазных напряжений, клеммы фазного напряжения Внешний вид модуля приведен на рисунке O.3.
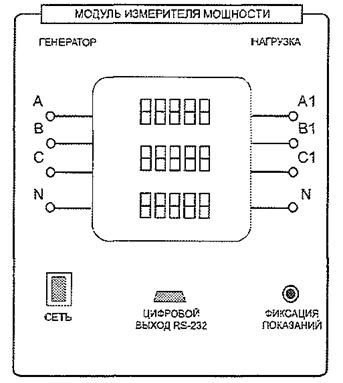
Рисунок O.3 – Модуль питания Модуль измерителя мощности Модуль измерителя мощности (ИМ) предназначен для измерения электрических параметров трехфазной сети переменного тока. Внешний вид модуля приведен на рисунке O.4.
Рисунок O.4 – Модуль измерителя мощности
На лицевой панели размещаются: – входные А, В, С и N (генератор) и выходные A1, B1, С1 и N (нагрузка) клеммы подключения модуля; – кнопка «Сеть» для подачи питания на измеритель мощности; – разъем подключения модуля к персональному компьютеру по последовательному порту RS-232; – кнопка фиксации показаний прибора. Измеритель мощности содержит трехстрочный дисплей. В таблице O.1 приведены измеряемые параметры.
Таблица O.1
Под трехстрочным дисплеем находятся кнопки управления: DISPLAY – переключение показаний измеряемых величин; CHANNEL – переключение показаний между фазами (только для значений W, WH, Var, VarH); MAX – переключение между максимальным, минимальным и действующим значением. RESET – сброс показаний; HOLD – фиксирование показаний. Технические характеристики измерителя приведены в таблице O.2
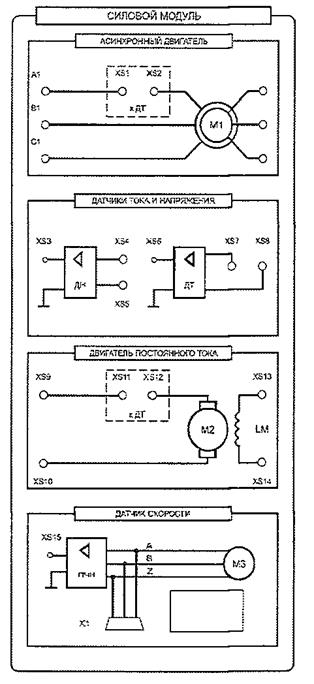
Силовой модуль Модуль силовой предназначен для упрощения набора силовых схем с электрическими машинами, а именно, для соединения силовых преобразователей с клеммами, расположенными на лицевой панели модуля с соответствующей мнемосхемой изображений электрических машин. Реальное подключение к электромашинному агрегату выполняется с тыльной стороны. На силовом модуле асинхронный электродвигатель имеет выводы как статорной, так и роторной цепи, однако лабораторные стенды комплектуются машинами как с фазным, так и с короткозамкнутым ротором (комплектность зависит от варианта стенда). Если в лабораторном комплексе используется асинхронный электродвигатель с короткозамкнутым ротором, то выходы роторной цепи не используются. На лицевой панели модуля имеется индикатор для отображения частоты вращения электродвигателей. Канал измерения скорости содержит энкодер МЗ и преобразователь частота-напряжение (ПЧН). Выход ПЧН (клемма XS15) представляет собой напряжение, пропорциональное частоте вращения двигателя. Модуль содержит датчик напряжения (ДН) типа LV25-P и датчик тока (ДТ) типа НХ03-Р. Датчики позволяют получить маломощные напряжения, пропорциональные значениям входных силовых токов и напряжений. Датчики обеспечивают потенциальное разделение силовых цепей и цепей управления. Датчик тока включаются в цепь последовательно, датчик напряжения – параллельно. При неправильном включении датчика ток возможен выход его из строя или срабатывание предохранителя на плате внутри модуля. Внешний вид модуля приведен на рисунке O.5.
Рисунок O.5 – Силовой модуль
Диапазоны работы датчиков приведены в таблице O.3.
Таблица О.3
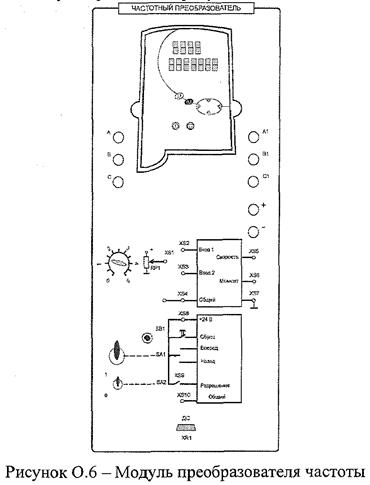
Преобразователь частоты Преобразователь частоты (ПЧ) обеспечивает преобразование переменного напряжения 3x380В в трехфазное напряжение с регулируемыми значениями напряжения и частоты. Внешний вид модуля приведен на рисунке О.6.
Модуль преобразователя частоты содержит: – преобразователь частоты Unidrive SP1401 с жидкокристаллическим индикатором; – силовые клеммы А, В, С подачи трехфазного напряжения на преобразователь; – силовые клеммы Al, Bl, C1 для снятия выходного напряжения преобразователя; – выходы звена постоянного тока преобразователя «+», «–»; – клеммы маломощных аналоговых сигналов управления преобразователя (XS2 – вход 1, XS3 – вход 2); – клеммы аналоговых выходов XS5, XS6; – потенциометр RP1 задания частоты/момента; – кнопку SB1 сброса внешней ошибки; – переключатель со средним положением SA1 для задания направления вращения; – тумблер SA3 разрешает работу преобразователя; – тумблер SA2 для переключения режима работы (по скорости/по моменту); – разъем «ДС» для заведения обратной связи по скорости с силового модуля.
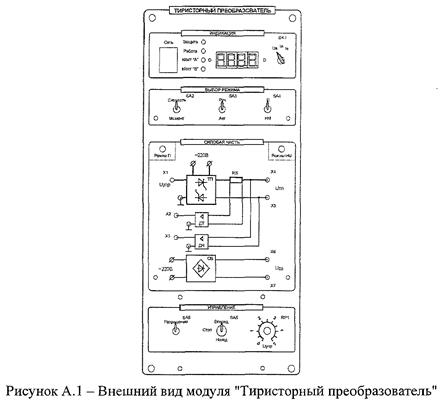
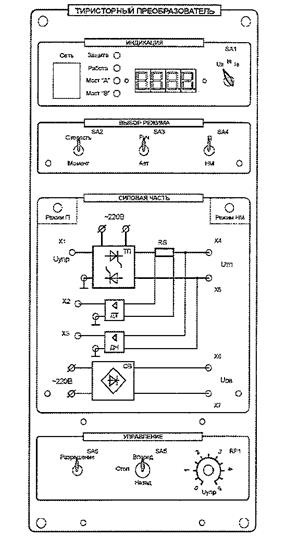
Тиристорный преобразователь Тиристорный преобразователь представляет собой однофазный двухкомплектный реверсивный преобразователь с раздельным управлением комплектами. Внешний вид модуля приведен на рисунке O.7.
Рисунок O.7 – Тиристорный преобразователь
На лицевую панель вынесены: – кнопка " Сеть" подачи питания на ТП; – переключатель SA1 служит для переключения индикации " напряжение/ток якоря/ток возбуждения"; – тумблер SA2 – выбор режима регулирования «Скорость»/«Момент»; – тумблер SA3 – выбор режима управления «Руч»/«Авт». В положении «Авт» управление осуществляется с внешнего входного сигнала, сигнал задается на клемму X1, внутренние связи преобразователя не размыкаются; – тумблер SA4 – выбор режима работы «П»/«НМ» В режиме «НМ» (нагрузочная машина) управление осуществляется с лицевой панели. В режиме «П» (преобразователь) управление осуществляется от модуля регуляторов, сигнал задания задается на клемму X1, при этом все внутренние обратные связи преобразователя размыкаются. Выбор режима работы сигнализируется соответствующими светодиодами; – тумблер SA5 осуществляет выбор направления вращения; – тумблер SA6 «Разрешение» обеспечивает разрешение управления силовой частью; – потенциометр RP1 обеспечивает уставку задания, в соответствии с положением тумблера SA2, по напряжению якоря или по моменту. Модуль ТП имеет индикатор, на который выводятся значения его выходного напряжения, тока якоря и возбуждения. Индикация режима работы преобразователя содержит 4 светодиода («Защита», «Работа», «мост А» и «мост В»).
Описание сборки схемы
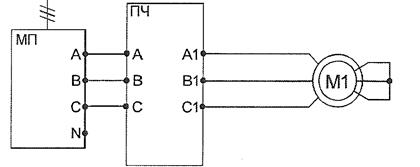
Для облегчения проведения лабораторных работ студентами в данном пункте в качестве примера рассматривается стандартная схема подключения асинхронного электродвигателя к преобразователю частоты. Рекомендуется ознакомиться с данным пунктом методических указаний перед проведением лабораторных работ. Для подключения преобразователя частоты с сети 3x380В необходимо подать на вход ПЧ трехфазное напряжение. Статорные обмотки асинхронного электродвигателя подключаются к выходу ПЧ. Для заведения сигнала задания на вход ПЧ необходимо соединить клеммы XS1 и XS2 ПЧ (выход потенциометра RP1 соединяется с аналоговым входом 1 преобразователя). Между клеммами XS1 и XS2 силового модуля ставится перемычка. В некоторых случаях между этими клеммами подключается амперметр или датчик тока. Схема, собираемая на стенде, приведена на рисунке O.8.
Рисунок O.8
Подача напряжения на лабораторный комплекс осуществляется включением автоматического выключателя QF1 модуля питания стенда. Подача напряжения 3x380В на преобразователь частоты осуществляется автоматическим выключателем QF2 модуля питания (клеммы А, В, С). Асинхронный электродвигатель реально подключен к силовому модулю. На силовом модуле размещаются мнемосхемы двигателей, а также клеммы для подачи силовых напряжений к статору АД, якорю и обмотке возбуждения ДПТ. Кроме этого, на мнемосхеме АД изображены клеммы фазного ротора, которые используются только в случае применения в стенде соответствующего двигателя. В целях улучшения наглядности набора схем в лабораторных работах представлены не помодульные электрические схемы, а упрощенные электрические схемы. Вариант такой схемы рассматривается на рисунке O.9.
Рисунок O.9
На данной схеме модуль питания стенда не показывается, так как с лицевой панели МПС не выполняется никаких соединений. Хотя выводы обмоток статора и ротора асинхронного двигателя, а также выводы обмоток якоря и возбуждения двигателя постоянного тока входят в состав силового модуля, однако на схеме (Рисунок O.9) двигатель показан отдельным элементом. Это сделано для того, чтобы не загромождать рисунок.
ПЧ-АД Цель работы
Исследовать режим регулирования момента системы ПЧ-АД.
Программа работы
1. Изучить схему для снятия характеристик системы ПЧ-АД. 2. Подготовить преобразователь к работе. 3. Запрограммировать ПЧ на режим регулирования момента в замкнутой системе. 4. Снять механическую характеристику ДПТ.
Пояснения к работе
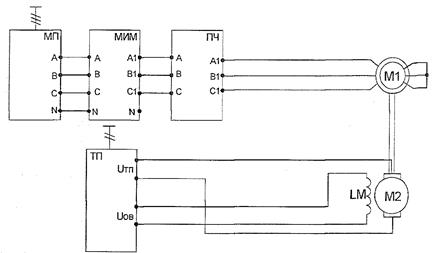
В лабораторной работе используются следующие модули: – модуль питания стенда (МПС); – модуль питания (МП); – модуль измерителя мощности (МИМ); – силовой модуль (СМ); – модуль преобразователя частоты (ПЧ); – модуль тиристорного преобразователя (ТП). Перед проведением работы при выключенных автоматических выключателях QF1 и QF2 модулей МПС и МП привести модули в исходное состояние: – переключатель SA1 модуля ПЧ перевести в среднее положение, SA2 - в положение «Скорость», потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля. – переключатель «Сеть» ТП перевести в нижнее положение, тумблер SA2 – в положение «Скорость», SA3 – в положение «Авт», SA4 – в положение «НМ», SA6 – в нижнее положение. Схема для снятия характеристик системы ПЧ-АД приведена на рисунке 6.1.
Рисунок 6.1 – Схема для снятия характеристик системы ПЧ-АД
Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП). Якорная обмотка присоединяется к регулируемому источнику постоянного тока модуля ТП, Обмотка возбуждения – к выходам нерегулируемого источника напряжения =220В модуля ТП. Статорная цепь асинхронного электродвигателя подключается к преобразователю частоты. Преобразователь частоты запитывается напряжением 3x380В от модуля питания через трехфазный измеритель мощности (МИМ).
6.1 Подготовка преобразователя частоты
В обычном режиме преобразователь частоты работает как источник скорости. Это означает, что электродвигатель переменного тока работает с частотой, заданной пользователем, на горизонтальной механической характеристике. В режиме регулирования момента электродвигатель выступает в качестве источника активного момента. При этом он вращается с частотой вращения нагружаемого агрегата. Пользователь задает только требуемый момент нагрузки. Преобразователь частоты Unidrive SP обеспечивает режим регулирования момента в разомкнутой и замкнутой системах, однако далее будет рассмотрен режим регулирования момента в замкнутой системе. Для переведения ПЧ в данный режим должны быть выполнены следующие действия: – сброс настроек на заводские; – настройка замкнутой системы по скорости; – инициализация режима регулирования момента. Далее приведен порядок действий по переведению ПЧ в режим регулирования момента: – в параметре 0.00 вести значение 1233 (сброс параметров ПЧ на заводские настройки); – установить переключатель SA3 «Разрешение» в положении 0; – установить значение параметра 0.00 на 1253 (разрешение на изменение работы преобразователя); – установить значение параметра 0.48 на CL.VECT (выбор режима работы преобразователя как замкнутой системы); – нажать кнопку «Стоп-Сброс»; – ввести паспортные данные исследуемого асинхронного электродвигателя (параметры 0.42–0.47); – занести в параметр 0.49 значение L2 (разрешение просмотра всех параметров); – нажать кнопку «Стоп-Сброс»; – в параметр 03.34 занести количество импульсов на один оборот датчика скорости (500 имп/об); – параметр 3.40 установить в «0»; – выполнить автонастройку. В параметр 0.40 ввести значение «2» и установить тумблер SA3 – в положение «1», SA1 в положение «Вперед». Если появится сообщение tunE2, убрать разрешение на работу ПЧ и поменять местами фазы А и В электродвигателя, после чего нажать кнопку «Сброс». Повторить автонастройку. – установить следующие значения: 4.13=400; 4.14 = 2000; 3.10 = 0.012; 3.11 = 1.2. – используя навигационную клавишу и кнопку режима установить параметры преобразователя в соответствии с таблицей 6.1.
Аналоговый вход 1 конфигурируется как задание момента. После вода параметров необходимо нажать кнопку «сброс» – ПЧ перейдет в режим регулирования момента. Проверить, что ПЧ перешел в режим регулирования момента, можно следующим образом: – потенциометр RP1 сигнала задания установить в крайнее положение против часовой стрелки; – подать сигнал разрешения на работу ПЧ (переключатель SA3); – выбрать направление вращения АД и задать небольшой момент. Под действием этого момента электродвигатель должен разогнаться до максимальной скорости. Если этого не происходит, следует проверить настройки и повторить опыт.
6.2 Снятие механической характеристики ДПТ
Для проверки режима регулирования момента необходимо использовать АД в качестве источника момента при исследовании двигателя постоянного тока. Для снятия механической характеристики ДПТ необходимо: – подать напряжение на ТП (кнопка «Сеть»); – подать разрешение на работу ТП (SA6) и установить частоту вращения двигателя на уровне 700... 1500 об/мин; – подать разрешение на работу ПЧ и, задав направление момента нагрузки (переключатель SA1), изменять момент нагрузки потенциометром RP1 модуля. Результаты измерений следует занести в таблицу 6.2.
После проведения опыта установить все переключатели модулей в исходное состояние.
Расчетные данные. Мощность, подводимая к двигателю, Вт
Потери в якорной цепи ДПТ, Вт
где rЯ – сопротивление якорной цепи ДПТ (Приложение В), Ом. Мощность на валу двигателя:
где Коэффициент полезного действия для двигательного режима
Коэффициент полезного действия для генераторного режима
Частота вращения двигателя, 1/с
Момент на валу двигателя,
По данным таблицы 6.1 построить механическую, электромеханическую характеристики, а также зависимость η =f(Мв), η =f(Iя).
Контрольные вопросы
1. Каким образом можно плавно регулировать момент, создаваемый асинхронным двигателем при постоянной частоте напряжения статора? 2. При работе ПЧ в качестве нагрузочной машины энергия торможения рекуперируется в преобразователь. Где эта энергия рассеивается? Укажите возможность рекуперации энергии в сеть. 3. Чем определяется текущая выходная частота ПЧ в режиме регулирования момента? В режиме регулирования скорости?
ПРИЛОЖЕНИЕ А Тиристорный преобразователь
Тиристорный преобразователь представляет собой однофазный двухкомплектный преобразователь с раздельный управлением комплектами. Преобразователь служит для управления электродвигателем постоянного тока независимого возбуждения. ТП содержит выходы управляемого преобразователя для питания обмотки якоря и выходы неуправляемого преобразователя =220В для питания обмотки возбуждения. Внешний вид модуля приведен на рисунке А.1.
На лицевую панель вынесены: – кнопка «Сеть» подачи питания на ТП; – переключатель SA1 служит для переключения индикации «напряжение, ток якоря, ток возбуждения»; – тумблер SA2 – выбор режима регулирования «Скорость»/«Момент»; – тумблер SA3 – выбор режима управления «Руч»/«Авт». В положение «Авт» управление осуществляется с внешнего входного сигнала, сигнал задается на клемму X1, внутренние связи преобразователя не размыкаются; – тумблер SA4 - выбор режима работы «П»/«НМ» В режиме «НМ» управление осуществляется с лицевой панели. В режиме «П» управление осуществляется от модуля регуляторов, сигнал задания задается на клемму X1, при этом все внутренние обратные связи преобразователя размыкаются. Выбор режима работы отображается соответствующими светодиодами; – тумблер SA5 осуществляет выбор направления вращения; – тумблер SA6 «Разрешение» обеспечивает разрешение управления силовой частью; – потенциометр RP1 обеспечивает уставку задания, в соответствии с положением тумблера SA2, по напряжению якоря или по моменту. Модуль ТП имеет индикатор, на который выводятся значения его выходного напряжения, тока якоря и возбуждения. Индикация режима работы преобразователя содержит 4 светодиода («Защита», «Работа», «Мост А» и «Мост В»). При работе в режиме НМ (нагрузочная машина) преобразователь работает в двух основных режимах (рисунок А.2): – регулирование скорости; – регулирование момента.
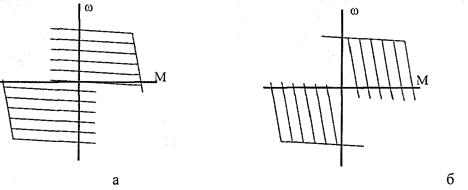
Рисунок А.2 - Механические характеристики ДПТ при работе ТП в режиме НМ: а - при регулировании задания по скорости; б - при регулировании задания по моменту.
В режиме регулирования скорости двигатель работает на горизонтальной механической характеристике, а в режиме регулирования по моменту - на вертикальной, при этом можно использовать двигатель как нагрузочное устройство для исследования асинхронной машины. Режим регулирования по скорости: Для работы преобразователя в режиме регулирования скорости необходимо: – тумблер SA2 установить в положение «Скорость»; – потенциометром RP1 производить регулирование скорости двигателя. Режим регулирования по моменту: Для работы преобразователя в режиме регулирования момента необходимо: – тумблер SA2 установить в положение «Момент»; – потенциометром RP1 регулировать момент, развиваемый двигателем. ПРИЛОЖЕНИЕ Б
ПРИЛОЖЕНИЕ В ОГЛАВЛЕНИЕ Стр. Описание лабораторного комплекса…………………………………………… 4 Работа №1. Исследование трехфазного асинхронного электродвигателя с короткозамкнутым ротором………………………………………………….. 13 Работа №2. Программирование преобразователя частоты. Снятие характеристик разомкнутой системы ПЧ-АД………………………………… 17 Работа №3. Исследование режимов компенсации системы ПЧ-АД………... 25 Работа №4. Исследование замкнутой системы ПЧ-АД……………………… 31 Работа №5. Способы пуска и торможения асинхронного электродвигателя в системе ПЧ-АД…………………………………………... 39 Работа №6. Режим регулирования момента системы ПЧ-АД………………. 44 Работа №7. Компьютерное управление системой ПЧ-АД…………………... 50
Приложение А………………………………………………………………….. 54 Приложение Б…………………………………………………………………... 56 Приложение В………………………………………………………………….. 59
ОПИСАНИЕ ЛАБОРАТОРНОГО КОМПЛЕКСА Назначение комплекса
Лабораторный комплекс «Частотно-регулируемый электропривод» (в дальнейшем изложении комплекс) предназначен для обучения студентов различных специальностей средних специальных и высших учебных заведений, изучающих дисциплины «Электрический привод», «Системы управления электроприводов». Комплекс может быть использован также для обучения учащихся профессионально-технических училищ и слушателей отраслевых учебных центров повышения квалификации инженерно-технических работников. В состав комплекса входят (рисунок O.1): – модуль питания стенда; – модуль питания; – модуль измерителя мощности; – модуль силовой; – модуль преобразователя частоты; – модуль тиристорного преобразователя; – каркас 2x3; – электромашинный агрегат; – персональный компьютер; – методические указания; – техническое описание; – компакт-диск с программным обеспечением.
Далее рассматриваются краткие технические характеристики отдельных модулей комплекса.
Модуль питания стенда Модуль питания стенда предназначен для ввода трехфазного напряжения 380В из сети в лабораторный комплекс, защиты комплекса от токов короткого замыкания, подачи силовых и низковольтных напряжений питания на модули стенда. Модуль содержит автоматический выключатель QF1, вторичный источник питания ±15В, +5В. Подключение стенда к источнику питания, подача силового и низковольтного напряжений на модули выполняется с помощью соединительных кабелей, подключаемых с тыльной стороны модуля. На лицевой части имеется индикация подачи силового напряжения по фазам А, В и С, а также низковольтных напряжений питания +5В, +15В и -15В. Кроме этого возможен контроль и низковольтных напряжений с лицевой панели (выведены соответствующие клеммы напряжений и общего провода). Внешний вид модуля приведен на рисунке О.2.
Модуль питания Модуль питания предназначен для подачи трехфазного напряжения 380В на модули при наборе схемы, защиты подключенных модулей от токов короткого замыкания. На лицевой панели модуля расположен автоматический выключатель QF2, клеммы трехфазного напряжения А, В, С, N (клеммы продублированы), индикация наличия фазных напряжений, клеммы фазного напряжения Внешний вид модуля приведен на рисунке O.3.
Рисунок O.3 – Модуль питания Модуль измерителя мощности Модуль измерителя мощности (ИМ) предназначен для измерения электрических параметров трехфазной сети переменного тока. Внешний вид модуля приведен на рисунке O.4.
Рисунок O.4 – Модуль измерителя мощности
На лицевой панели размещаются: – входные А, В, С и N (генератор) и выходные A1, B1, С1 и N (нагрузка) клеммы подключения модуля; – кнопка «Сеть» для подачи питания на измеритель мощности; – разъем подключения модуля к персональному компьютеру по последовательному порту RS-232; – кнопка фиксации показаний прибора. Измеритель мощности содержит трехстрочный дисплей. В таблице O.1 приведены измеряемые параметры.
Таблица O.1
Под трехстрочным дисплеем находятся кнопки управления: DISPLAY – переключение показаний измеряемых величин; CHANNEL – переключение показаний между фазами (только для значений W, WH, Var, VarH); MAX – переключение между максимальным, минимальным и действующим значением. RESET – сброс показаний; HOLD – фиксирование показаний. Технические характеристики измерителя приведены в таблице O.2
Силовой модуль Модуль силовой предназначен для упрощения набора силовых схем с электрическими машинами, а именно, для соединения силовых преобразователей с клеммами, расположенными на лицевой панели модуля с соответствующей мнемосхемой изображений электрических машин. Реальное подключение к электромашинному агрегату выполняется с тыльной стороны. На силовом модуле асинхронный электродвигатель имеет выводы как статорной, так и роторной цепи, однако лабораторные стенды комплектуются машинами как с фазным, так и с короткозамкнутым ротором (комплектность зависит от варианта стенда). Если в лабораторном комплексе используется асинхронный электродвигатель с короткозамкнутым ротором, то выходы роторной цепи не используются. На лицевой панели модуля имеется индикатор для отображения частоты вращения электродвигателей. Канал измерения скорости содержит энкодер МЗ и преобразователь частота-напряжение (ПЧН). Выход ПЧН (клемма XS15) представляет собой напряжение, пропорциональное частоте вращения двигателя. Модуль содержит датчик напряжения (ДН) типа LV25-P и датчик тока (ДТ) типа НХ03-Р. Датчики позволяют получить маломощные напряжения, пропорциональные значениям входных силовых токов и напряжений. Датчики обеспечивают потенциальное разделение силовых цепей и цепей управления. Датчик тока включаются в цепь последовательно, датчик напряжения – параллельно. При неправильном включении датчика ток возможен выход его из строя или срабатывание предохранителя на плате внутри модуля. Внешний вид модуля приведен на рисунке O.5.
Рисунок O.5 – Силовой модуль
Диапазоны работы датчиков приведены в таблице O.3.
Таблица О.3 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-24; Просмотров: 189; Нарушение авторского права страницы
 220В и выпрямленного напряжения =220В.
220В и выпрямленного напряжения =220В.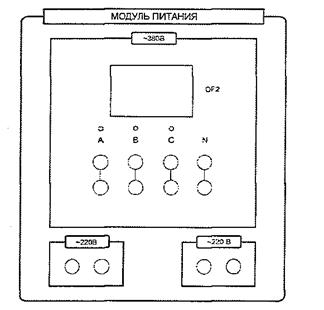













 – механические потери электродвигателя (Приложение В), Вт.
– механические потери электродвигателя (Приложение В), Вт.