|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАБОТА №7. КОМПЬЮТЕРНОЕ УПРАВЛЕНИЕ СИСТЕМОЙ ПЧ-АД
Цель работы
Изучить возможность программирования и управления преобразователем частоты Unidrive SP 1401 от персонального компьютера.
Программа работы
1. Изучить схему для снятия характеристик системы ПЧ-АД. 2. Подготовить преобразователь к работе с компьютером. 3. Настроить компьютер для работы с ПЧ. 4. Синхронизировать преобразователь частоты с компьютером.
Пояснения к работе
В лабораторной работе используются следующие модули: – модуль питания стенда (МПС); – модуль питания (МП); – силовой модуль (СМ); – модуль преобразователя частоты (ПЧ);
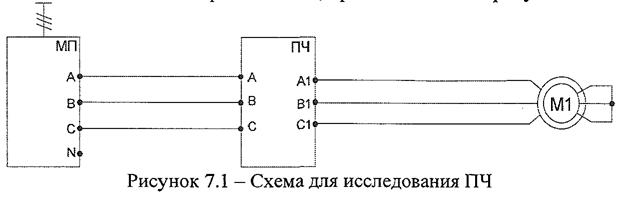
Перед проведением работы при выключенных автоматических выключателях QF1, QF2 МПС и МП необходимо вернуть переключатели модулей в исходное положение: – потенциометр RP1 ПЧ установить в крайнее положение против часовой стрелки; – переключатель SA3 ПЧ установить в положение «0», SA2 – в положение «Скорость», SA1 – в среднее положение. – соединить USB – разъем персонального компьютера с разъемом на лицевой панели преобразователя частоты (разъем расположен под резиновой заглушкой) специальным кабелем. Для исследования ПЧ собирается схема, представленная на рисунке 7.1.
7.1 Подготовка преобразователя частоты к работе
Перед началом работы необходимо установить начальные (заводские) настройки преобразователя частоты: – включить автоматические выключатели QF1, QF2 МПС и МП; – в параметре 0.00 установить значение 1233, нажать кнопку «М»; – нажать кнопку «стоп/сброс» – преобразователь сбросит настройки на заводские. После сброса настроек на заводские необходимо установить параметры протокола связи с компьютером: – в параметре 0.35 установить режим последовательного порта (AnSI); – в параметре 0.36 установить скорость последовательного порта (38400); – в параметре 0.37 установить адрес последовательного порта (11).
7.2 Подготовка компьютера для работы с ПЧ
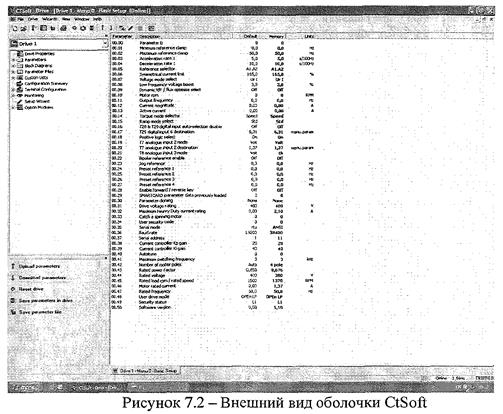
Для связи преобразователя частоты с компьютером используется программное обеспечение CTSoft, поставляемое с преобразователем частоты. Перед работой с ПЧ необходимо установить параметры связи: – после запуска CTSoft в меню File выбрать команду New. Создается новый проект, в котором предлагается настроить параметры связи (появляется окно Drive Properties); – в окне Drive Properties установить параметры связи: Node ID=11, Protocol=ANSI, Hardware=COM3, BauRate=38, 4 kbit/s. – после подтверждения настроек в меню Drive выбрать команду Online – при успешной установке параметров связи происходит синхронизация компьютера и ПЧ. При нормальной установке параметров связи появляется окно, внешний вид которого представлен на рисунке 7.2.
7.3 Настройка преобразователя частоты от компьютера
Для навигации по меню программируемых параметром ПЧ необходимо в левой части экрана выбрать меню Parameters. Появляется список меню, а на основном экране выводится содержание выбранного текущего меню (по умолчанию, меню 0). В меню 0 занести параметры подключенного электродвигателя (параметры 0.42-0.47). При выборе конкретного параметра появляется диалоговое окно, содержащее значение параметра и его описание. При нажатии кнопки Ok происходит запись параметра в ПЧ. После занесения параметров необходимо выполнить процедуру автонастройки: – в параметр 0.40 занести значение 2; – подать сигнал разрешения на работу ПЧ (переключатель SA3); – выбрать направление вращения (переключатель SA1). Привод совершит процедуру автонастройки и после успешного ее завершения сбросит параметр 0.40 в «0». По умолчанию преобразователь частоты использует в качестве источника сигнала задания и логических команд внешние элементы управления (потенциометр RP1, переключатель SA1, отвечающий за выбор направления вращения). Для управления ПЧ от персонального компьютера необходимо определить источник сигнал задания: – в параметре 0.05 установить значение Рr. Это задействует в качестве источника сигнала задания параметр 0.24 (предустановленная частота); – для управления сигналами «вперед/назад», а также сигналом «работа/останов» используются параметры меню 6; – за рабочее состояние привода отвечает параметр 6.34 (бит последовательности «работа»). В положении ON (1) привод работает, в положении OFF (0) выключен; – за направление вращения двигателя отвечает параметр 6.33 (бит последовательности «вперед/назад»). Несмотря на установку данных параметров, преобразователь частоты работает только при подаче сигнала разрешения (переключатель SA3).
Для запуска электродвигателя необходимо: – подать сигнал разрешения (переключатель SA3); – установить параметр 6.34 в положение Оn; – задавая частоту вращения в параметре 0.24, осуществить разгон электродвигателя; – опробовать реверс (параметр 6.33); В ходе эксперимента можно поменять темп разгона/торможения, тип торможения и т.д. Текущее значение выходного напряжения, тока, частоты можно наблюдать соответственно в параметрах 5.02, 4.01, 5.01 меню программируемых параметров.
В данной работе не ставится задача снимать опытные характеристики системы ПЧ-АД. Студент должен ознакомиться с управлением ПЧ от компьютера и продемонстрировать его преподавателю.
ПРИЛОЖЕНИЕ А Тиристорный преобразователь
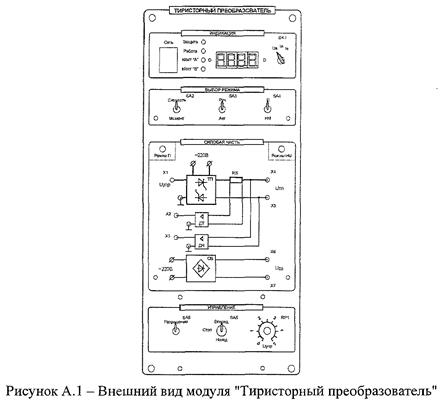
Тиристорный преобразователь представляет собой однофазный двухкомплектный преобразователь с раздельный управлением комплектами. Преобразователь служит для управления электродвигателем постоянного тока независимого возбуждения. ТП содержит выходы управляемого преобразователя для питания обмотки якоря и выходы неуправляемого преобразователя =220В для питания обмотки возбуждения. Внешний вид модуля приведен на рисунке А.1.
На лицевую панель вынесены: – кнопка «Сеть» подачи питания на ТП; – переключатель SA1 служит для переключения индикации «напряжение, ток якоря, ток возбуждения»; – тумблер SA2 – выбор режима регулирования «Скорость»/«Момент»; – тумблер SA3 – выбор режима управления «Руч»/«Авт». В положение «Авт» управление осуществляется с внешнего входного сигнала, сигнал задается на клемму X1, внутренние связи преобразователя не размыкаются; – тумблер SA4 - выбор режима работы «П»/«НМ» В режиме «НМ» управление осуществляется с лицевой панели. В режиме «П» управление осуществляется от модуля регуляторов, сигнал задания задается на клемму X1, при этом все внутренние обратные связи преобразователя размыкаются. Выбор режима работы отображается соответствующими светодиодами; – тумблер SA5 осуществляет выбор направления вращения; – тумблер SA6 «Разрешение» обеспечивает разрешение управления силовой частью; – потенциометр RP1 обеспечивает уставку задания, в соответствии с положением тумблера SA2, по напряжению якоря или по моменту. Модуль ТП имеет индикатор, на который выводятся значения его выходного напряжения, тока якоря и возбуждения. Индикация режима работы преобразователя содержит 4 светодиода («Защита», «Работа», «Мост А» и «Мост В»). При работе в режиме НМ (нагрузочная машина) преобразователь работает в двух основных режимах (рисунок А.2): – регулирование скорости; – регулирование момента.
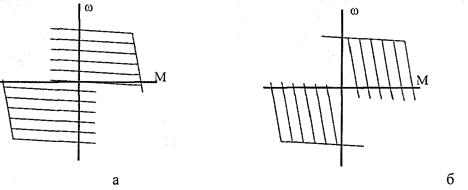
Рисунок А.2 - Механические характеристики ДПТ при работе ТП в режиме НМ: а - при регулировании задания по скорости; б - при регулировании задания по моменту.
В режиме регулирования скорости двигатель работает на горизонтальной механической характеристике, а в режиме регулирования по моменту - на вертикальной, при этом можно использовать двигатель как нагрузочное устройство для исследования асинхронной машины. Режим регулирования по скорости: Для работы преобразователя в режиме регулирования скорости необходимо: – тумблер SA2 установить в положение «Скорость»; – потенциометром RP1 производить регулирование скорости двигателя. Режим регулирования по моменту: Для работы преобразователя в режиме регулирования момента необходимо: – тумблер SA2 установить в положение «Момент»; – потенциометром RP1 регулировать момент, развиваемый двигателем. ПРИЛОЖЕНИЕ Б
|
Последнее изменение этой страницы: 2019-10-24; Просмотров: 176; Нарушение авторского права страницы