|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Работа №2. ПРОГРАММИРОВАНИЕ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ. СНЯТИЕ ХАРАКТЕРИСТИК РАЗОМКНУТОЙ СИСТЕМЫ ПЧ-АД
Цель работы
Исследование рабочих свойств разомкнутой системы " Преобразователь частоты - асинхронный двигатель" (ПЧ-АД), частотного регулирования скорости вращения асинхронных электродвигателей.
Программа работы
1. Изучить принципы работы с модулем преобразователя частоты. 2. Изучить схему для снятия характеристик системы ПЧ-АД. 3. Запрограммировать преобразователь частоты для управления асинхронным двигателем. 4. Выполнить пробный пуск системы. 5. Снять семейство механических характеристик в режиме скалярного управления. 6. Снять семейство регулировочных характеристик системы. 7. Построить энергетические диаграммы
Пояснения к работе
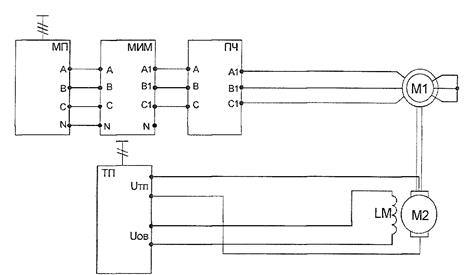
В лабораторной работе используются следующие модули: – модуль питания стенда (МПС); – модуль питания (МП); – модуль измерителя мощности (МИМ); – силовой модуль (СМ); – модуль преобразователя частоты (ПЧ); – модуль тиристорного преобразователя (ТП); Исследуемый асинхронный электродвигатель с короткозамкнутым ротором входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель M1, нагрузочную машину – двигатель постоянного тока независимого возбуждения – М2, импульсный датчик скорости М3. Перед проведением работы при выключенном автомате QF1 МПС привести модули в исходное состояние: – переключатель " Сеть" модуля ТП перевести в нижнее положение, тумблер SA3 – в положение «Руч», SA4, SA6 – в нижнее положение, SA5 – в среднее положение. Перевести ТП в режим регулирования момента (Приложение А); – переключатель SA3 модуля ПЧ перевести в нижнее положение, потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля. Переключатель SA1 установить в среднее положение. Схема для снятия характеристик системы ПЧ-АД приведена на рисунке 2.1.
Рисунок 2.1 – Схема для снятия характеристик разомкнутой системы ПЧ-АД
Преобразователь частоты (ПЧ) запитывается трехфазным напряжением 3x380В от модуля питания (МП). Для контроля электрических величин последовательно в цепь включается измеритель мощности (МИМ). Статарная цепь асинхронного электродвигателя подключается к выходу ПЧ. Двигатель постоянного тока, подключенный к модулю тиристорного преобразователя (ТП), выступает в качестве нагрузочного устройства при исследовании асинхронного электродвигателя (АД).
2.1 Программирование преобразователя частоты
Перед началом работы с преобразователем частоты необходимо запрограммировать его на заданный режим работы, так как преобразователь частоты может обеспечивать работу электродвигателя в различных режимах: – регулирование скорости в разомкнутой/замкнутой системах; – регулирование момента в разомкнутой/замкнутой системах; – работа преобразователя в связи с компьютером. Перед настройкой преобразователя на конкретный режим работы необходимо сбросить настройки преобразователя на заводские (по умолчанию). Это необходимо сделать, так как в ходе работы с преобразователем могли быть изменены некоторые настройки, не удовлетворяющие требуемому режиму работы. В преобразователе частоты Unidrive SP 1401 меню программируемых параметров разделено на 22 подменю, в каждом из которых собраны параметры, отвечающие за определенную функцию. Для облегчения работы с преобразователем в меню 0 собраны копии параметров, наиболее часто используемых при работе с приводом. При программировании ПЧ используется съемная кнопочная панель с двустрочным светодиодным или ЖК индикатором. Описание и назначение кнопок съемной панели приведено в Приложении Б. Для программирования ПЧ необходимо: – подать напряжение на ПЧ последовательным включением автоматов QF1, QF2 МПС и МП соответственно; – клавишами «вверх», «вниз» панели управления добиться вывода на индикацию параметра 0.00 (верхний индикатор); – зайти в параметр 0.00 нажатием кнопки «М»; – сбросить настройки привода на заводские для 50 Гц установкой в параметре значения 1233; – подтвердить установку нажатием кнопки «М»; – нажать кнопку «Стоп/сброс». После сброса настроек необходимо установить в преобразователе номинальные данные электродвигателя и произвести автонастройку привода: – в параметре 0.42 установить число полюсов; – в параметре 0.43 установить номинальный коэффициент мощности; – в параметре 0.44 установить номинальное линейное напряжение двигателя; – в параметре 0.45 установить номинальную скорость двигателя; – в параметре 0.46 установить номинальный ток двигателя; – в параметре 0.47 установить номинальную частоту двигателя; – для разрешения автонастройки установить в параметре 0.40 значение 2; – разрешить работу привода переключением тумблера SA3 в положение «1». Преобразователь совершит автонастройку и при успешном окончании сбросит параметр 0.40 в 0; – после окончания процедуры снять разрешение на работу ПЧ (SA3).
2.2 Пробный пуск привода
Пробный пуск привода необходимо выполнить для того, чтобы убедиться в правильных настройках ПЧ и возможности плавного задания выходной частоты и напряжения. Для пробного пуска ПЧ необходимо: – подать разрешение на работу ПЧ (переключатель SA3); – задать необходимое направление вращения (переключатель SA1); – установить потенциометром RP1 модуля необходимую частоту вращения, электродвигатель должен разогнаться до скорости, соответствующей установленной частоте; – опробовать реверс двигателя переведением переключателя SA1 в положение, противоположное установленному ранее; – остановить двигатель (SA1 в среднее положение); – убрать разрешение на работу ПЧ. Установленную выходную частоту можно наблюдать в параметре 5.01, выходное напряжение – в параметре 5.02, ток – в параметре 4.01. Переход в меню 1, 2, 3, и т.д. осуществляется кнопками «влево», «вправо» кнопочной панели ПЧ.
2.3 Механические характеристики системы ПЧ-АД
Скалярное управление в системе ПЧ-АД сводится к управлению по закону U/f=const, при котором критический момент асинхронного двигателя при регулировании частоты вращения держится постоянным. Для установки данного режима работы ПЧ необходимо выполнить следующие действия: – выключить режим компенсации скольжения (параметр 5.27=OFF); – установить режим быстрой рампы (параметр 2.04=FAST). Механическая характеристика системы ПЧ-АД представляет собой зависимость частоты вращения от полезного момента на валу при постоянном значении частоты и напряжения: ω = f(Мв), при fc, Uc=const. Электромеханическая характеристика представляет собой зависимость частоты вращения от тока статора при постоянном значении частоты и напряжения: ω =f(Ic), при fc, Uc=const. Опыт проводится в следующей последовательности: – включением автоматического выключателя QF1 МПС подать напряжение на стенд; – включением автоматического выключателя QF2 МП подать напряжение на преобразователь частоты; – включить кнопку " Сеть" модуля ТП; – подать разрешение на работу ПЧ и, выбрав направление вращения асинхронного электродвигателя переключателем SA1 модуля ПЧ, задать потенциометром RPT выходную частоту преобразователя 50Гц; – подать разрешение на работу ТП (тумблер SA6); – зафиксировав необходимые величины согласно таблице 2.1, задать момент нагрузки. Таким образом снять несколько точек в двигательном и генераторном режимах; – после проведения опыта вывести момент нагрузки на ноль (RP1 модуля ТП), убрать разрешение на работу ТП, остановить асинхронный электродвигатель.
Повторить опыт для двух других значений частоты на выходе преобразователя. По полученным опытным и расчетным данным построить следующие зависимости: – – – –
2.4 Регулировочные характеристики системы ПЧ-АД
Регулировочные характеристики представляют собой зависимости выходной частоты, напряжения, мощности от сигнала задания при постоянном моменте на валу двигателя: f, Uc, P, S = f(UЗ), MB=const. Для снятия характеристик необходимо: – установить максимальную выходную частоту преобразователя частоты 60 Гц (параметр 0.02=60); – запустить ПЧ и разогнать двигатель до максимальной скорости, соответствующей частоте 60 Гц; – задав нагрузку с помощью тиристорного преобразователя (значение Iя задается преподавателем и выбирается в пределах 0...1А), уменьшать выходную частоту ПЧ, фиксируя необходимые параметры. Сигнал задания (параметр 7.01) отображается в процентах от максимального сигнала (10В). Выходная частота отображается в параметре 5.01. Результаты опыта занести в таблицу 2.2.
Таблица 2.2
Расчетные данные. Полная выходная мощность преобразователя частоты, ВА
где UСФ – фазное напряжение на выходе ПЧ, В. Частота вращения электродвигателя, 1/с
Электрические потери в статорной обмотке электродвигателя, Вт
где rс – активное сопротивление фазы статора, Ом. Электрические потери в цепи якоря ДПТ, Вт
где rя – активное сопротивление якорной обмотки ДПТ, Ом. Выходная мощность ТП, Вт
Мощность на валу асинхронного электродвигателя, Вт:
где Активная выходная мощность ПЧ, Вт
где Коэффициент полезного действия асинхронного электродвигателя:
Коэффициент полезного действия системы:
Момент на валу асинхронного двигателя, Нм:
По полученным опытным и расчетным данным построить следующие зависимости: – – – –
2.5 Энергетические диаграммы
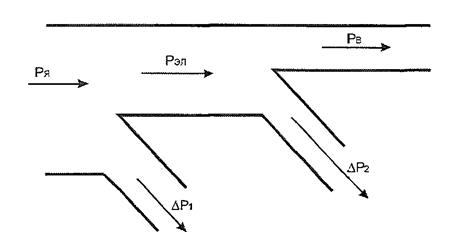
Энергетические диаграммы представляют собой графическое отображение распределения потерь и показывают направление потоков мощностей в электроприводе. Диаграмма отображается в масштабе для конкретного режима работы и для конкретной точки. Направление потоков мощностей показывается стрелками с указанием величин потерь. Примерный вид диаграммы для двигательного режима электродвигателя представлен на рисунке 2.2.
Рисунок 2.2 – Энергетическая диаграмма ДПТ для двигательного режима
В лабораторной работе необходимо построить диаграммы для двигательного, генераторного режима, а также для режимов реального и идеального холостого хода.
Контрольные вопросы
1. Какие способы регулировки частоты вращения асинхронных электродвигателей вы знаете? 2. С какой целью при регулировании частоты вращения изменяются одновременно частота и напряжение на выходе преобразователя? 3. Укажите достоинства и недостатки применения частотного регулирования? 4. Объясните работу преобразователя в тормозном режиме. Где рассеивается энергия торможения двигателя?
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-24; Просмотров: 301; Нарушение авторского права страницы




















 , при
, при  ,
,  ,
,  , при
, при  ,
,  , при
, при  , при
, при  .
.
























 ,
,  – механические потери ДПТ (Приложение В).
– механические потери ДПТ (Приложение В).
 – механические потери АДКЗ (Приложение В).
– механические потери АДКЗ (Приложение В).
 асинхронного двигателя:
асинхронного двигателя: 


 , при
, при  ,
,  , при
, при  ,
,  , при
, при  , при
, при