
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Инерциальные измерители линейных ускорений
Приборы и датчики ускорений применяются в пилотажных и навигационных системах для решения различных задач, среди которых можно выделить следующие: - формирование предупреждающих сигналов при достижении воздушным судном предельно допустимых перегрузок; - формирование сигналов для отключения системы коррекции в таких приборах, как авиагоризонты и гировертикали; - формирование сигналов для инерциальной системы навигации, где они интегрируются с целью определения путевой скорости и местоположения воздушного судна; - формирование сигналов обратной связи в системах управления полетом воздушного судна. Особо следует выделить первую задачу, поскольку контроль перегрузок непосредственно связан с безопасностью полета. Перегрузка определяется отношением геометрической суммы всех действующих на воздушное судно сил к модулю силы тяжести:
где R – вектор полной аэродинамической силы; P – вектор силы тяги двигателя. Указатели и датчики перегрузки используются для измерения величины продольной nx, нормальной (вертикальной) ny и поперечной nz перегрузок по осям связанной с самолетом системы координат. Нормальная перегрузка показывает, во сколько раз подъемная сила превосходит силу тяжести. Перегрузка – величина безразмерная. Она может быть как положительной, когда подъемная сила направлена вверх, так и отрицательной, когда подъемная сила направлена вниз (например, при входе в пикирование). В горизонтальном полете нормальная перегрузка равна единице. Существует несколько методов измерения линейных ускорений и перегрузок, в частности, инерциальный метод, метод дифференцирования скорости полета и метод двукратного дифференцирования расстояния до неподвижной базы. На воздушных судах основное применение нашел инерциальный метод. Он основан на измерении силы инерции, действующей на инерционную массу при ее движении с ускорением. Приборы и датчики, основанные на этом принципе действия, называются акселерометрами. В зависимости от способа измерения силы различают акселерометры пружинные и компенсационные. В пружинных акселерометрах сила инерции, действующая на инерционную массу, вызывает упругую деформацию пружины, которая создает противодействующую силу. Величина деформации пружины при этом является мерой измеряемого ускорения. В компенсационных акселерометрах сила инерции компенсируется силой, создаваемой магнитоэлектрическим или другим преобразователем. Мерой измеряемого ускорения является какая-либо характеристика, связанная с силой, создаваемой преобразователем. По характеру перемещения инерционной массы пружинные акселерометры делятся на осевые и маятниковые (рис. 2.12). Схема осевого пружинного акселерометра представлена на рис. 2.12, а.
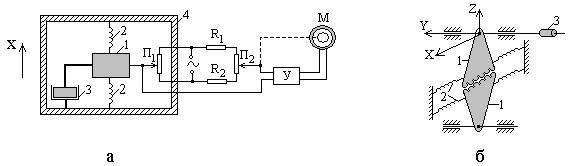
Рис. 2.12. Схемы пружинных акселерометров: а – пружинный осевой акселерометр (1 – инерционная масса; 2 – пружины; 3 - демпфер; 4 – корпус акселерометра); б – пружинный маятниковый акселерометр (1 – маятники; 2 – пружины; 3 – индукционный датчик). Стрелкой показана ось чувствительности акселерометра (ось Х) При возникновении ускорений, направленных вдоль оси чувствительности Х, инерционная масса будет смещаться в направлении, противоположном вектору ускорения. Это приведет к деформации пружин и возникновению силы упругости, пропорциональной величине деформации s, которую можно определить из условия
где k – суммарный коэффициент жесткости пружин. Величина деформации пружин пропорциональна измеряемому ускорению. Ее можно определить по напряжению, снимаемому со щетки потенциометра П1, которая связана с инерционной массой. Это напряжение измеряется с помощью следящей системы, включающей в себя потенциометр П2, дифференциальный усилитель У и электродвигатель М, ротор которого жестко связан со щеткой потенциометра П2. При перемещении инерционной массы на величину s перемещается и щетка потенциометра П1, что вызывает изменение напряжения на одном из входов усилителя. Напряжение с выхода усилителя поступает на управляющую обмотку электродвигателя, что вызовет вращение ротора, а вместе с ним и щетки потенциометра П2. Двигатель будет работать до тех пор, пока щетка потенциометра П2 не установится в такое положение, при котором напряжения на входах усилителя не станут равными. Таким образом, угол поворота ротора двигателя однозначно связан с величиной изменения напряжения на щетке П1, а значит, в конечном итоге, и с величиной ускорения. Демпфер служит для гашения возможных колебаний инерционной массы в переходных режимах. Применяются воздушные, жидкостные или магнитоиндукционные демпферы. Вместо потенциометрического могут быть использованы индуктивный или емкостной преобразователи. Акселерометры обладают методической погрешностью, возникающей при наличии линейных ускорений по перекрестным осям (в нашем случае по осям Y и Z), а также в случае движения воздушного судна по криволинейной траектории относительно перекрестных осей. Инструментальная погрешность возникает в результате влияния ряда внешних и внутренних факторов, в частности, из-за наличия сил трения, наличия гистерезиса пружин, изменения коэффициента жесткости пружин при изменении температуры, неравномерности характеристики преобразователя перемещений. Наличие сил трения приводит к возникновению порога чувствительности, под которым понимают минимальное значение ускорения, которое можно измерить данным прибором. В маятниковых акселерометрах (см. рис. 2.12, б) порог чувствительности ниже и, кроме того, конструктивными мерами можно снизить влияние линейных ускорений по перекрестным осям. Акселерометр представляет собой систему из двух маятников 1, подвешенных на шарикоподшипниках и удерживаемых в вертикальном положении двумя парами пружин 2, оба маятника связаны между собой зубчатым зацеплением. Такая кинематическая схема обеспечивает отклонение маятников от положения равновесия только под воздействием ускорения, направленного вдоль оси Х. Влияние ускорений по оси Z практически отсутствует. Сигнал, пропорциональный ускорению, снимается с индукционного датчика 3, ротор которого закреплен на оси верхнего маятника, а статор – на корпусе прибора.
Принцип действия компенсационных акселерометров поясняет схема, приведенная на рис. 2.13. На маятнике 1 закреплена инерционная масса 2, а также постоянный магнит 3 и якорь 4. Осью чувствительности акселерометра является ось Х. При наличии вдоль этой оси ускорения а на инерционную массу m будет действовать сила инерции ma, что вызовет отклонение маятника от вертикали. Перемещение якоря относительно обмоток индуктивного преобразователя 5 приведет к появлению на выходе преобразователя напряжения, которое поступает на вход усилителя У. После усиления и выпрямления ток iвых, сформированный усилителем, поступит на обмотки моментного магнитоэлектрического преобразователя 6, что приведет к появлению силы, действующей на магнит. В результате маятник останется неподвижным. Чем больше ускорение, тем больше ток, необходимый для компенсации силы инерции. Таким образом, мерой измеряемого ускорения является ток iвых или падение напряжения Uвых на резисторе R. Инструментальные погрешности компенсационных акселерометров существенно меньше, чем у пружинных, так как в них нет пружин, в меньшей степени влияют силы трения, которые к тому же можно уменьшить, поместив инерционную массу в жидкость («гидравлический подвес»). Поэтому компенсационные акселерометры используются для высокоточного измерения ускорений в инерциальных навигационных системах. |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 268; Нарушение авторского права страницы


 Для демпфирования колебаний системы к верхнему маятнику крепится специальная пластина из меди (на рисунке не показана), которая помещается в зазор магнитопровода специального электромагнита, питаемого постоянным током. Колебания маятника в переходных режимах вызывают появление в пластине вихревых токов, которые, взаимодействуя с магнитным полем, создают тормозящий момент сил, способствующий успокоению системы.
Для демпфирования колебаний системы к верхнему маятнику крепится специальная пластина из меди (на рисунке не показана), которая помещается в зазор магнитопровода специального электромагнита, питаемого постоянным током. Колебания маятника в переходных режимах вызывают появление в пластине вихревых токов, которые, взаимодействуя с магнитным полем, создают тормозящий момент сил, способствующий успокоению системы.