
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электромеханические манометры
Использование трубопроводов, соединяющих механические деформационные манометры с расположенным на расстоянии объектом контроля, снижает эксплуатационную надежность вследствие возможного нарушения герметичности трубопровода, а также приводит к запаздыванию показаний при измерениях. Этого недостатка лишены электромеханические манометры, в которых сигналы с преобразователей давления (датчиков), установленных непосредственно на контролируемых объектах, с помощью дистанционной передачи поступают на указатели, установленные обычно на приборной доске. Отличие электромеханического преобразователя давления от механического деформационного манометра заключается в том, что деформация ЧЭ преобразуется не в перемещение стрелки указателя, а в изменение электрической величины (R, L или C). В используемых на воздушных судах электромеханических манометрах обычно используются датчики потенциометрического и индуктивного типов. Наибольшее распространение получили манометры типа ЭДМУ, ЭМ, ЭДММ, ДИМ, ИКГ, МИ. В манометрах ЭДМУ, ЭМ и ЭДММ применяются потенциометрические преобразователи, в остальных – индуктивные. В качестве указателей обычно используют логометры. Рассмотрим наиболее распространенные типы электромеханических манометров.
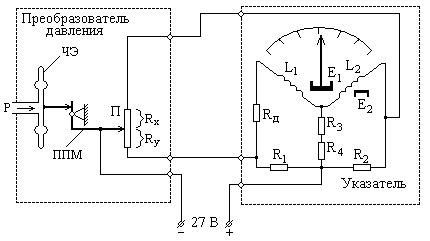
Рис. 2.2. Принципиальная схема электромеханического дистанционного манометра ЭДМУ На рис. 2.2 приведена принципиальная схема манометра типа ЭДМУ (унифицированного электромеханического дистанционного манометра). Измеряемое давление р поступает внутрь упругого ЧЭ, деформация которого посредством передаточно-множительного механизма передается щетке потенциометра П. Сопротивления Rx и Ry образуют два переменных плеча моста Андерсона. Два других плеча составляют резисторы R1 и R2. Катушки логометра L1 и L2 вместе с резистором Rд образуют диагональ моста (резистор Rд необходим для выравнивания сопротивлений катушек). В полудиагональ моста включены резисторы R3 и R4, предназначенные для компенсации температурной погрешности, возникающей из-за изменения сопротивления катушек логометра с температурой. Резистор R3 изготовлен из меди, а резистор R4 из константана, что обеспечивает нужный температурный коэффициент сопротивления термокомпенсирующих резисторов. Токи, протекающие по виткам катушек логометра, создают магнитные поля, которые воздействуют на постоянный магнит Е1, связанный со стрелкой указателя. При отсутствии деформации ЧЭ (давления внутри мембранной коробки и снаружи одинаковы) мост сбалансирован и через катушки протекают одинаковые токи, в результате чего стрелка указателя устанавливается в нулевое положение. При возникновении деформации ЧЭ и перемещении щетки потенциометра мост разбалансирован и через катушки логометра L1 и L2 будут протекать разные токи, в результате чего стрелка указателя отклонится от нулевого положения на угол, пропорциональный измеряемому давлению. Магнит Е2 служит для возврата стрелки указателя в нулевое положение при отключении питания. Погрешность измерения такого манометра составляет примерно ± 4 %.
Принципиальная схема манометра типа ДИМ приведена на рис. 2.3. В качестве указателя используется магнитоэлектрический двухкатушечный логометр с подвижным магнитом, аналогичный тому, что используется в манометрах типа ЭДМУ. Два плеча мостовой схемы образуют катушки L1 и L2, двумя другими плечами являются резисторы R1 и R2. Резисторы R3 и R4 служат для температурной компенсации погрешности, возникающей из-за изменения сопротивления катушек с температурой. Так как схема питается переменным током, а логометр работает на постоянном токе, для выпрямления тока в схему введены два выпрямительных диода. Деформация упругого чувствительного элемента 1 через шток 2 передается якорю 3, который изменяет величину воздушных зазоров магнитных цепей катушек L1 и L2, что соответственно изменяет индуктивности катушек (у одной увеличивается, а у другой уменьшается, или наоборот). Это приводит к разбалансу моста и повороту стрелки указателя на угол, пропорциональный измеряемому давлению. Манометры типа МИ имеют такой же преобразователь давления, что и манометры типа ДИМ, но в них использован другой тип указателя, а именно, ферродинамический логометр. Погрешность измерения у них несколько ниже, чем у манометров типа ДИМ (около ± 3 %). Модификацией индуктивных дистанционных манометров являются индикаторы комбинированные гидрогазовой системы ИКГ. Электрические схемы аналогичны схемам манометров типа ДИМ, а преобразователи давления имеют незначительные конструктивные отличия. Существенно отличается шкала указателя, которая выполнена вертикально. Погрешность измерений примерно в два раза ниже, чем у манометров типа ДИМ. Погрешности электромеханических манометров включают в себя погрешности механических манометров, рассмотренные выше, к которым добавляются погрешности электрических элементов прибора. Так к инструментальным погрешностям механических элементов добавляется погрешность от наличия силы трения в потенциометрическом преобразователе. Температура влияет не только на упругие свойства ЧЭ, но и на параметры элементов схемы, например, сопротивления резисторов. Для снижения этой погрешности используют дифференциальные электрические преобразователи давления, а также включаемые в электрическую схему специальные резисторы – термокомпенсаторы. Дополнительная методическая погрешность появляется при изменении напряжения питания электромеханического манометра. В этом случае из-за наличия поля неподвижного магнита Е2 (см. рис. 2.2) меняется направление результирующего вектора магнитного поля, по которому устанавливается подвижный магнит со стрелкой. Поэтому необходимо стабилизировать напряжение питания манометра, а неподвижный магнит должен создавать слабое поле, достаточное лишь для возвращения стрелки в нулевое положение. |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 508; Нарушение авторского права страницы
 В электрических дистанционных индуктивных манометрах ДИМ используют индуктивные преобразователи давления. Их преимуществом является отсутствие передаточно-множительного механизма и трущихся частей, что значительно повышает надежность и устойчивость манометров к вибрациям. Диапазон измеряемых давлений – 0, 03…30 МПа, а погрешность при нормальных условиях не превышает ± 4 %.
В электрических дистанционных индуктивных манометрах ДИМ используют индуктивные преобразователи давления. Их преимуществом является отсутствие передаточно-множительного механизма и трущихся частей, что значительно повышает надежность и устойчивость манометров к вибрациям. Диапазон измеряемых давлений – 0, 03…30 МПа, а погрешность при нормальных условиях не превышает ± 4 %.