
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электрический указатель поворота
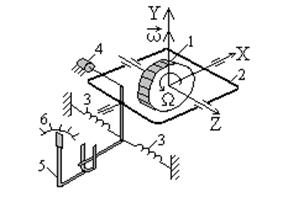
Электрические указатели поворота предназначены для указания наличия и направления разворота самолета вокруг вертикальной оси. Существует несколько разновидностей указателей поворота (ЭУП-53, ДА200, ДА30), совмещающих в себе несколько самостоятельных независимых приборов. Например, электрический указатель поворота ЭУП-53 кроме указателя поворота имеет указатель скольжения, что позволяет осуществлять правильный (координированный) разворот самолета, при котором скольжение равно нулю. Дублер авиагоризонта ДА30 кроме этого имеет встроенный вариометр с пределом измерения вертикальной скорости 0…30 м/с. На рис. 2.16 приведена кинематическая схема электрического указателя поворота ЭУП-53. Ось вращения ротора гироскопа параллельна поперечной оси самолета, ось вращения рамы параллельна продольной оси самолета. Рама гироскопа удерживается в среднем положении с помощью пары пружин. Поворот рамы с помощью передаточно-множительного механизма передается стрелке указателя.
Рис. 2.16. Схема электрического указателя поворота: 1 – ротор двухстепенного гироскопа; 2 – рама гироскопа; 3 – пара пружин; 4 – демпфер; 5 – стрелка указателя; 6 – шкала Как отмечалось ранее, при развороте самолета с угловой скоростью ω рама гироскопа поворачивается на угол β 0 = Нω /с. Однако, это справедливо лишь при разворотах самолета без крена. Если разворот совершается с креном γ, то отклонение рамы гироскопа от среднего положения будет определяться выражением
где с – суммарный коэффициент жесткости пружин.
Если разворот координированный, то равнодействующая сил направлена по нормали к плоскости самолета и шарик находится в центре указателя. В этом случае угол крена γ, скорость полета V и угловая скорость разворота ω связаны между собой соотношением
Если выразить отсюда ω и подставить в выражение (2.5), то получим:
Из выражения (2.6) следует, что при координированном развороте, угол поворота рамы гироскопа (а вместе с ним и угол отклонения стрелки указателя поворота) зависит от двух переменных – от скорости полета и угла крена. При фиксированной скорости полета угол крена однозначно определяется углом отклонения рамы гироскопа. Шкала указателя поворота ЭУП-53 проградуирована в диапазоне ±45° с ценой деления 15°. Стрелка указателя будет точно показывать угол крена при выполнении двух условий: разворот координированный (шарик указателя скольжения находится в центре трубки) и скорость полета соответствует той, что указана на шкале прибора. В зависимости от типа самолета значения скорости, при которой градуировался прибор, равны 200, 400 и 500 км/ч. Если скорость полета больше той, что указана на приборе, показания крена будут занижены, если меньше – завышены. Датчик угловой скорости Датчики угловой скорости (ДУС) используются в различных системах самолета, в частности в автопилоте, и предназначены для измерения угловой скорости самолета и выдачи электрического сигнала, пропорционального измеряемой угловой скорости.
Кинематическая схема ДУС представлена на рис. 2.18. Ротор 1 гироскопа крепится через подшипники к раме 2, которая выполнена в виде герметичного кожуха. Кожух может вращаться (прецессировать) относительно продольной оси в подшипниках, закрепленных в корпусе 3 датчика. Пружины 4 выполняют ту же роль, что и в ЭУП, то есть создают противодействующий момент. При повороте датчика с угловой скоростью ω вокруг оси чувствительности, которая перпендикулярна главной оси гироскопа и оси прецессии, возникает поворот кожуха на некоторый угол, зависящий от угловой скорости. Этот поворот с помощью потенциометра 5 преобразуется в электрический сигнал. В некоторых конструкциях вместо потенциометрических преобразователей угла поворота используют бесконтактные индукционные преобразователи. Важным фактором, резко повышающим чувствительность датчика, является то, что пространство между стенками датчика и кожухом заполнено специальной жидкостью (маслом). При этом плотность жидкости достаточно высока, что позволяет удерживать кожух на плаву. Давление, оказываемое осью вращения кожуха на подшипники, ничтожно мало, тем самым обеспечивается вращение кожуха в подшипниках практически без трения. Такой гироскоп называется поплавковым. Жидкость в ДУС выполняет также роль демпфирующей среды, в которой за счет трения жидкости о стенки корпуса и кожуха при повороте последнего создается демпфирующий момент. Датчики такого типа имеют порог чувствительности на уровне 0, 05 град/с. Датчики угловых скоростей |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 265; Нарушение авторского права страницы
 (2.5)
(2.5) При разворотах важно, чтобы вектор скорости совпадал с продольной осью самолета, то есть угол скольжения был равен нулю. Это так называемый координированный (или правильный) разворот. Индикатором угла скольжения служит указатель скольжения (рис. 2.17), работающий по принципу маятника. Чувствительным элементом является шарик, перемещающийся внутри изогнутой стеклянной трубки, заполненной прозрачной жидкостью – толуолом. При разворотах самолета на шарик, кроме силы тяжести G = mg, действует центробежная сила инерции Fц.б = mVω (m – масса шарика; V – скорость полета). Равнодействующая этих сил определяет положение шарика в трубке.
При разворотах важно, чтобы вектор скорости совпадал с продольной осью самолета, то есть угол скольжения был равен нулю. Это так называемый координированный (или правильный) разворот. Индикатором угла скольжения служит указатель скольжения (рис. 2.17), работающий по принципу маятника. Чувствительным элементом является шарик, перемещающийся внутри изогнутой стеклянной трубки, заполненной прозрачной жидкостью – толуолом. При разворотах самолета на шарик, кроме силы тяжести G = mg, действует центробежная сила инерции Fц.б = mVω (m – масса шарика; V – скорость полета). Равнодействующая этих сил определяет положение шарика в трубке.
 (2.6)
(2.6)