
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОСНОВНЫЕ УЗЛЫ АГРЕГАТОВ, ИХ РАСЧЕТСтр 1 из 18Следующая ⇒
ОСНОВНЫЕ УЗЛЫ АГРЕГАТОВ, ИХ РАСЧЕТ И КОНСТРУИРОВАНИЕ УСТЬЕВОЕ ЭКСПЛУАТАЦИОННОЕ ОБОРУДОВАНИЕ
Непосредственно на устье скважины и над ним устанавливают оборудование, обеспечивающее выполнение работ с колонной гибких труб при соблюдении правил безопасности. К этим устройствам относятся превентор, герметизатор устья скважины, транспортер с направляющей дугой и его основание. ПРЕВЕНТОР
Назначение превентора - это обеспечение безопасности в процессе ведения работ при возникновении нештатных ситуаций. Под последними подразумевают аварийную потерю работоспособности основных устройств агрегата - транспортера и герметизатора, а также внезапные проявления скважины - выбросы и фонтанирование. Превентор должен включать секции, которые позволяют удерживать колонну гибких труб, перерезать ее, обеспечивать герметизацию полости скважины по всему ее поперечному сечению и при обжатии гибкой трубы плашками. Для этого применяют четырехсекционные превенторы, включающие секции с клиновыми захватами тр> убы, обжимающими последнюю, и секцию со срезающими и глухими плашками. Учитывая малую вероятность в необходимости использования превентора, можно применять конструкцию с ручным приводом плашек. Однако использование комбинированных приводов - ручного и гидравлического - позволяет повысить комфортность управления агрегатом. Превентор является изделием, широко применяющимся при бурении и добыче нефти и газа. Ниже превентора устанавливают тройник, обеспечивающий закачку технологической жидкости в кольцевое пространство между колоннами КГТ и НКТ (или эксплуатационной колонной). Этот же тройник используют для отвода отработанной жидкости.
ГЕРМЕТИЗАТОР УСТЬЯ СКВАЖИНЫ
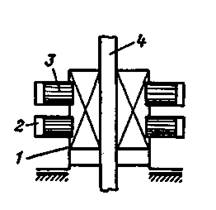
Основное назначение герметизатора - это изоляция внутренней полости скважины и колонны лифтовых труб от внешней среды. При этом в изолируемых полостях могут находиться под давлением 16 - 20 МПа продукция скважины (нефть, газ, вода), технологическая жидкость, используемая при обработке скважины (соляной раствор, жидкость на нефтяной основе, растворы кислот), а также твердые включения (песок, окалина, частицы парафина). В процессе работы комплекса оборудования при выполнении технологических операций в скважине и спуске или подъеме трубы КГТ соответственно перемещается со скоростью 0, 01 - 0, 05 и 0, 4 - 1 м/с. В любом случае герметизатор должен исключать утечки в зазоре между его корпусом и поверхностью гибких труб. Кроме того, герметизатор устья служит для пропуска в полость скважины инструментов и приборов, наружный диаметр которых превышает наружный диаметр трубы в 1, 2 -1, 5 раза. Условия эксплуатации агрегатов предопределяют оперативное управление герметизатором в зависимости от величины давления в полости скважины. Но самым важным требованием является надежная работа уплотнительного элемента, в частности, обеспечение его работоспособности как при штатном режиме функционирования агрегата, так и при отказе или остановке каких-либо систем, например, при внезапной остановке приводного двигателя и последующей паузе при его запуске (или ремонте). С учетом всех перечисленных требований герметизатор выполняют в виде контактного уплотнения с использованием в качестве уплотнительного элемента втулки из эластомера. Материалом для создания герметизатора служит маслобензоизносостойкая резина или полиуретан. Уплотнение осуществляют с принудительным поджимом к уплотняемой поверхности, для чего используют гидравлический привод, которым управляют из кабины оператора агрегата. Один из вариантов схемы герметизатора приведен на рис. 3.1. Он включает корпус 7, в нижней части которого расположен уплотнительный элемент 6. Выше него находится приводной гидроцилиндр 4 диаметром D, полый шток 3 которого перемещается поршнем 2.
Рисунок 3.1 - Схема герметизатора устья с осевым расположением Приводного цилиндра
Колонна гибких труб 1 проходит через полый шток 3, центрируется направляющей втулкой 5 и взаимодействует с уплотнительным элементом. Для установки нового и извлечения Изношенного уплотнительного элемента в нижней части корпуса предусмотрен затвор 8, положение которого относительно корпуса фиксируется посредством упорной резьбы или байонетного соединения. Для крепления герметизатора на превенторе имеется фланец 9. Описанная конструкция герметизатора наиболее проста, но ее недостатки - это значительные осевые габариты и существенная масса. Однако они компенсируются высокой надежностью и удобством обслуживания. При необходимости повышения герметизирующей способности уплотнительного элемента в процессе его работы в полости А увеличивают давление рабочей жидкости гидропривода, а для разгрузки уплотнительного элемента последнее или уменьшают в полости Л, или увеличивают в полости В. При этом уплотнительный элемент может быть полностью разгружен, и между ним и наружной поверхностью гибкой трубы образуется зазор. В процессе работы в кольцевом пространстве С между гибкой трубой и полым штоком накапливается технологическая жидкость, проникающая туда из полости скважины. При перемещении колонны гибких труб вниз необходимо следить за тем, чтобы эта жидкость постоянно там находилась, обеспечивая смазку поверхности трубы, взаимодействующей с уплотнением. Для этого, например, рекомендуют периодически уменьшать давление в приводном цилиндре, увеличивая утечку до тех пор, пока жидкость не заполнит весь кольцевой объем. После его заполнения и появления жидкости у верхней кромки полого штока давление следует опять увеличить. Невыполнение этого условия приведет к тому, что уплотнительный элемент начнет " гореть" и интенсивно изнашиваться. Приводной гидроцилиндр должен иметь определенный запас хода, который в процессе работы позволяет сжимать изношенный уплотнительный элемент, обеспечивая сохранение работоспособности всего узла в целом. Этот запас хода дает возможность также выталкивать из корпуса изношенный уплотнительный элемент при его замене, что облегчает и ускоряет проведение ремонтных работ в промысловых условиях. Меньшей массой и меньшими осевыми габаритами обладают герметизаторы с радиальным расположением приводных цилиндров (рис. 3.2). При использовании подобной схемы усилие прижима уплотнительного элемента обеспечивается несколькими поршнями (плунжерами), размещенными в боковой поверхности корпуса. Недостатком подобной конструкции является то, что равномерное прижатие уплотнительного элемента к поверхности гибкой трубы начинает обеспечиваться при сравнительно высоких давлениях (порядка 5 -6 МПа). Это обусловлено тем, что эластомерный уплотнительный элемент, расположенный в замкнутом объеме корпуса, только в этих случаях ведет себя подобно жидкости. При меньших давлениях он работает как упругое тело, подчиняющееся закону Гука. Поэтому при высоких давлениях уплотняемой среды в полости скважины обеспечивается равномерное изнашивание по всей длине уплотнительного элемента, а при малых - неравномерное, в основном в средней его части.
1 - корпус герметизатора устья; 2 - цилиндр; 3 -плунжер; 4 - колонна гибких труб
Рисунок 3.2 - Схема герметизатора устья с радиальным расположением приводных цилиндров.
Уплотнительный элемент является специфическим узлом, применяемым только для агрегатов ПРС. Поэтому расчет его основных элементов в технической литературе практически не освещен. Выбор основных параметров. С точки зрения теории рассматриваемый тип уплотнительного элемента может быть отнесен к мягким сальниковым набивкам с принудительным поджимом к уплотняемой поверхности. Оценка возможности его работы осуществляется по критерию Р K × v [12], где Рк -контактное давление на поверхность, МПа; v - скорость относительного скольжения, м/с. При Р K × v > 5, 6 - 6 МПа× (м/с) для нормальной работы уплотнительного элемента необходимо применять смазку рабочей средой или от постороннего источника. Применительно к условиям работы агрегата на скважине это означает, что при перемещении колонны гибких труб со скоростью 0, 5 м/с (перемещение труб на рабочую отметку) давление на буфере не должно превышать 12 МПа. В процессе работы уплотнительного элемента типа набивки осевые и радиальные (контактные) давления распределяются по экспоненциальному закону [13] Рос = Ро exp [2 af × ( L - х)/ b ]\ Рк = аРо exp [2 af × ( L - x )/ b ]. Здесь значение а характеризует жесткость материала уплотнительного элемента (при ориентировочных расчетах а принимают равным 0, 5); f - коэффициент трения (в рассматриваемых условиях f = 0, 1); b и L - радиальный и осевой размеры уплотнительного элемента. Исходя из условия пропорциональности контактного давления градиенту давления, величина давления жидкости в зазоре между уплотнительным элементом и поверхностью трубы определяется соотношением
Р (x) = Ро [1 - ехр × (-a × х /A × b)]/[1 - ехр × (-a × L/A × b)], (3.1)
где А - параметр, характеризующий рабочие свойства уплотнения (А = 1, 0 ¸ 1, 2).
Неравномерность распределения контактного давления приводит к тому, что в зоне нижнего торца уплотнительного элемента, там где находится уплотняемая среда, P к в 2 - 2, 5 раза выше, чем в верхней части. Большие значения имеют место при перемещении труб вниз, меньшие - вверх (рис. 3.3). Для обеспечения оптимального распределения контактных давлений при использовании в качестве материала уплотнительного элемента эластомеров со средним значением твердости следует принимать его наружный диаметр и высоту равными 140 - 150 мм для гибкой трубы с наружным диаметром до 40 мм. С учетом приведенных зависимостей (см. рис. 3.3) можно утверждать, что схема уплотнительного элемента с радиальным поджимом обеспечивает ему лучшие условия работы по сравнению с осевым нагружением.
Рисунок 3.3 - Эпюра контактных давлений в уплотнительном элементе. Жирной стрелкой показано усилие, сжимающее уплотнительный элемент
Кинематический расчет параметров. Этот расчет сводится к определению размеров приводного гидроцилиндра, обеспечивающего создание соответствующего контактного давления при заданном давлении рабочей жидкости гидропривода. Рассматривая приводной цилиндр как гидравлический мультипликатор давления, можно записать
( dy - d тр )2 × P к min = ( D – d п.ш. )2 × Рг где D - рабочий диаметр приводного цилиндра; d п.ш. - наружный диаметр полого штока; dy - наружный диаметр уплотнительного элемента; d тр - наружный диаметр гибкой трубы; Рк min - минимальное значение контактного давления; P г - рабочее давление в гидроприводе агрегата.
Из этой формулы при заданных значениях давлений и размеров уплотнительного элемента могут быть определены размеры гидроцилиндра. Пример. Определим размеры приводного цилиндра для уплотнительного элемента 150x150 мм для гибкой трубы с наружным диаметром 33 мм, при максимальном давлении в полости скважины 20 МПа и давлении в гидроприводе агрегата 10 МПа. Из конструктивных соображений с учетом значения диаметра гибкой трубы выберем наружный диаметр полого штока. В данном случае примем d п.ш. = 80 мм. При dy = 150 мм, d тр = 33 мм, Рк = 20, Рг = 10
Полученный результат округляют в большую сторону до ближайшего (250 мм) нормализованного значения диаметров цилиндров, применяемых в гидроприводе. Далее на основе зависимости (1.3) определяют фактическое значение давления рабочей жидкости в гидроприводе, которое обеспечит заданные показатели. Естественно, оно будет меньше заданного значения Рг. Расчет на прочность. Расчет корпуса уплотнительного элемента на прочность выполняют по методике оценки прочности цилиндров. При известном внутреннем диаметре цилиндра толщину его стенки d определяют по формуле [14]
где [ s] - допускаемое напряжение материала корпуса. Расчет на прочность крепления затвора к корпусу выполняют согласно методам расчета резьб, принятых в машиностроении. При этом крепление затвора должно выдерживать осевую нагрузку, создаваемую приводным гидроцилиндром при подаче в его полость А рабочей жидкости гидропривода под максимальным рабочим давлением.
НАСОСНАЯ УСТАНОВКА
Насосная установка (рис. 3.4) состоит из группы аксиально-поршневых насосов НА1 - НА5, приводимых в действие посредством раздаточного редуктора. Ведущий вал последнего соединен карданным валом с коробкой отбора мощности автомобильного шасси, на котором смонтирован агрегат. Насос Я расположен на силовом агрегате автомобильного шасси. В рабочем положении агрегата насосы НА1 - НА5 перекачивают жидкость из бака Б1 и направляют ее либо к соответствующим исполнительным органам, либо обратно в бак (т.е. работают вхолостую). Назначение указанных насосов следующее: • НА1 используют для питания исполнительных органов монтажного оборудования при свертывании или развертывании агрегата и привода лебедки при проведении подземного ремонта; • НА2 применяют для обеспечения работы транспортера на малой скорости и питания исполнительных органов управления транспортером и уплотнителем; • НАЗ используют для осуществления работы транспортера на большой скорости; • НА4 и НА5 служат для привода винтовых насосов, перекачивающих технологическую жидкость; H нужен для привода вентилятора принудительного охлаждения бака.
Рисунок 3.4 – Гидравлическая схема насосной установки
Напорные линии насосов через напорные фильтры Ф1 -Ф9 соединены с предохранительными клапанами КП1 - КП6. Каждый фильтр снабжен предохранительным клапаном, открывающимся при засорении фильтрующего элемента выше допустимого уровня. Для принудительного охлаждения бака Б1 служит вентилятор, приводимый в действие гидромотором М1, управление которым осуществляется распределителем РВ с электроприводом. Первичный прибор - датчик термометра установлен во всасывающем коллекторе силовых насосов и фиксирует температуру рабочей жидкости гидропривода, поступающей на их прием. Вторичный прибор для измерения температуры расположен в кабине управления агрегатом. Включение (выключение) привода вентилятора осуществляется из кабины оператора, в зависимости от показаний термометра и погодных условий. Для отключения этой системы от бака при проведении ремонта служит вентиль В H З.
ГИДРОПРИВОД ЛЕБЕДКИ
Лебедка обеспечивает наматывание и разматывание гибкой трубы в процессе выполнения спускоподъемных операций. Для привода барабана лебедки (рис. 3.6) используется гидромотор М2, который через планетарный редуктор вращает вал барабана. Для принудительного перемещения укладчика трубы применяется гидромотор МЗ, а выключение муфты сцепления механизма, синхронизирующего вращение барабана и механизма укладки, осуществляется цилиндром Ц22. Оба гидромотора М2 и МЗ имеют реверсивное исполнение. Частота вращения барабана лебедки изменяется с помощью настройки регулятора расхода РП1. Для " подтормаживания" барабана при сматывании с него гибкой трубы (с целью обеспечения постоянного натяжения трубы, намотанной на барабан) служит предохранительный клапан КП7. Он включен последовательно с дросселем ДР9 (с установленным параллельно ему обратным клапаном) и распределителем Р15. Вращение барабана в направлении наматывания трубы обеспечивается распределителем РЗ. При этом на правую управляющую обмотку последнего подается напряжение. При работе в режиме разматывания трубы включается распределитель Р15 (напряжение подается на его нижнюю обмотку). Его вал при приложении крутящего момента в результате натяжения разматываемой трубы начинает вращаться только тогда, когда давление достигает величины, на которую отрегулирован предохранительный клапан КП7. Для исключения самопроизвольного вращения вала барабана служит гидравлический замок ЗМ5. В противном случае труба, намотанная на барабан, из-за наличия упругих деформаций стремится самопроизвольно размотаться, что приводит к смещению регулярной укладки витков и повреждению трубы при наматывании и разматывании. Для принудительного перемещения трубоукладчика и изменения направления его перемещения предназначен распределитель Р4 с электромагнитным управлением. Дроссели ДР10 и ДР11 служат для регулирования скорости перемещения трубоукладчика, а клапан ЧК, соединенный с цилиндром Ц22, обеспечивает отключение муфты сцепления. Питание исполнительных органов гидропривода лебедки осуществляется насосом НА2.
Рисунок 3.6 - Гидропривод лебедки
ГИДРОПРИВОД ТРАНСПОРТЕРА
Транспортер предназначен для перемещения гибкой трубы при ее спуске или подъеме из скважины. Привод цепей транспортера (рис. 3.7) обеспечивается двумя реверсивными гидромоторами М4 и М5, для идентичного вращения которых имеется синхронизирующая шестеренчатая передача. Для предотвращения самопроизвольного перемещения цепей транспортера вниз служит тормозной клапан КТ. Включение и изменение направления вращения гидромоторов осуществляется двумя параллельно включенными распределителями Р6 и Р7 с электрогидравлическим управлением, которое принято для повышения надежности их работы в условиях низких температур окружающего воздуха. Для соединения шлангов гидросистемы транспортера с трубопроводами гидросистемы агрегата использованы гидравлические разъемы РГ2, РГЗ, РГ10, РГ11. Питание исполнительных органов гидропривода транспортера осуществляется насосами НА3 и НА4 через систему регулирования скорости транспортера.
Рисунок 3.7 - Гидропривод транспортера
ТРАНСПОРТЕРА
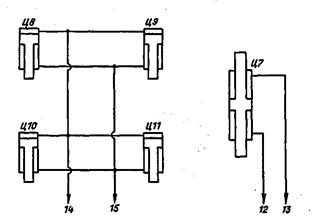
Для регулирования натяжения цепей (рис. 3.10) служат гидроцилиндры Ц8 - Ц11, включенные параллельно и обеспечивающие перемещение валов нижних звездочек транспортера.
ГИДРОПРИВОД ГЕРМЕТИЗАТОРА
Для обеспечения герметичности внутренней полости колонны НКТ предназначен уплотнительный элемент, поджим которого обеспечивается гидроцилиндром Ц7. Он имеет полый сквозной шток (рис. 3.11).
Рис. 3.10. Гидропривод механиз- Рис. 3.11. Гидропривод герметиза- ма натяжения цепей транспортера тора
В результате
u = [ R × ( Q ф /2) × p × K ом × 1000]/30 i × q к. Скорость перемещения трубы при номинальной частоте вращения вала приводного двигателя
u = [0, 114 × (159, 6/2) × 3, 14 × 0, 95 × 1000]/30 × 24 × 112 = 0, 336 м/с. При работе приводного двигателя с максимальной частотой вращения n ф = 1800 об/мин, подача насосов Q ф = 191 л/мин и соответственно скорость перемещения трубы u = 0, 4 м/с.
Нормальная N ( j ) = 0, 5 × P × sin j; Поперечная Q ( j ) = 0, 5 × P × cos j; Изгибающий момент
М( j ) = P × R тр.н × (0, 3183 - 0, 5 × sin j ). (3.2)
Приложение двух пар сосредоточенных сил. Этот случай соответствует соотношению R тр.н > R п. Здесь также в качестве координаты рассматриваемого сечения принят угол j.
Нормальная сила: интервал 0 £ j £ a
N( j ) = -(P/2) × [0, 3183 × cos j × (sin2 b - sin2 a )];
интервал a £ j £ b
N( j ) = -(P/2) × [0, 3183 × со s j × (sin2 b - sin2 a ) + sin j ];
интервал b £ j £ p
N ( j ) = -(Р/2) × [0, 3183 × со s j × ( sin 2 b - sin 2 a )].
Поперечная сила:
интервал 0 £ j £ a
Q ( j ) = (-Р/2) × [0, 31838 sin j × ( sin 2 a - sin 2 b )]; интервал a £ j £ b Q( j ) = (-P/2) × [0, 3183 × sin j × (sin2 a - sin2 b ) + со s j ];
интервал b £ j £ p
Q( j ) = (-P/2) × [0, 3183 × sin j × (sin2 a - sin2 b )].
Изгибающий момент: интервал 0 £ j £ a
М( j ) = ( PR т p .н./2)[0, 3183( b × sin b + cos b - a × sin a - cos a - - sin2 a × со s j + sin2 b × со s j ) - sin b + sin a ]; (3.3)
интервал a £ j £ b
M( j ) = (PR т p.н /2) × [0, 3183( b × sin b + cos b - a × sin a - cos a - - sin2 a × со s j + sin2 b × со s j ) - sin b + sin j ]; (3.4)
интервал b £ j £ p
М ( j ) = (PR тр . н /2) × [0, 3183( b × sin b + cos b - a × sin a - cos a - - sin a × со s j + sin2 b × со s j )]. (3.5)
В рассматриваемом случае нагружения трубы предполагают, что каждая из действующих сил равна половине усилия, приложенного к плашке. Приложение распределенной нагрузки. Этот случай соответствует соотношению R тр.н = R п (см. рис. 3.15, б). Значение j характеризует текущую угловую координату продольного сечения, в которой определяется изгибающий момент, а a - половину угла охвата трубы плашкой. Силовые факторы в поперечных сечениях определяются следующим образом. Нормальная сила: интервал 0 £ j £ a
N ( j ) = - q × R т p .н × sin 2 j,
интервал a £ j £ p - a
N ( j ) = - q × R тр.н. × sin a × sin j. Поперечная сила: интервал 0 £ j £ a Q ( j ) = q × R тр.н × sin j × соs j;
интервал a £ j £ p - a
Q ( j ) = q × R тр.н. × sin a × cos j.
Изгибающий момент: интервал 0 £ j £ a М( j ) = q × R 2 тр.н. {(1/ p ) × [(0, 5 a + a × sin 2 a + 1, 5 × sin a × cos a )] - - 0, 5 sin 2 a - 0, 5 sin 2 j }; (3.6)
интервал a £ j £ p - a
М( j ) = q × R 2 тр.н. {(1/ p ) × [(0, 5 a + a × sin 2 a ) + 1, 5 × sin a × cos a ] - - 0, 5 sin 2 a - sin a × sin j + 0, 5 sin 2 a }; (3.7)
Для определения экстремальных значений изгибающих моментов в безразмерной форме были построены эпюры, характеризующие зависимости M ( j ) для различных условий приложения нагрузки. Для обеспечения возможности сопоставления получаемых величин по формулам (3.2) - (3.7) при распределенной нагрузке коэффициент выражен через величину силы Р, приложенной к плашке, и ее ширину L п = 2 × R × sin a. Тогда
q × R тр.н. = R 2 тр.н. × Р/ L = R 2 тр.н. × Р/2 × R тр.н. × sin a = P × R тр.н. /2 × sin a
Отсюда величины безразмерных изгибающих моментов M 1 ( j ) могут быть представлены следующим образом:
Координата сечения трубы j, в которой действует мак- симальный момент, градус.... 0 0 0 и 90
1 - сосредоточенная сила; угол охвата трубы плашкой a, градус: 2 - 20, 3 - 40, 4 - 60, 5 - 80; j - текущая координата
Рис. 3.16. Эпюра изгибающих моментов M ( j ) в поперечном сечении гибкой трубы, взаимодействующей с плашками при R тр.н < R п
1 - сосредоточенная сила; угловая координата точек приложения сил a, градус: 2 - 20, 3 - 30, 4 - 40, 5 - 60, 6 - 80; j - текущая координата
Рис. 3.17. Эпюра изгибающих моментов М( j ) в поперечном сечения гибкой трубы, взаимодействующей с плашками при R тр.н > R п Из приведенных данных следует, что наиболее предпочтительным случаем при взаимодействии трубы и плашек является приложение распределенной нагрузки. Вместе с тем, при действии двух сосредоточенных сил деформация поперечного сечения трубы приводит к увеличению площади контакта и в итоге к передаче усилия по всей площади плашки. Картина деформации поперечного сечения при приложении двух пар сосредоточенных сил является более сложной. При угле а 40 * 50° они могут вызвать сплющивание трубы. Но поскольку подобные значения углов в плашках не предусмотрены, данный вопрос как представляющий сугубо теоретический интерес рассмотрен не будет. Исходя из полученных зависимостей (3.2) - (3.7), может быть вычислен изгибающий момент и определены максимальные напряжения, возникающие при обжатии трубы плашками. Рассмотрим пример расчета напряжений в предположении, что отсутствует давление технологической жидкости во внутренней полости трубы и на нее нет осевой нагрузки. Под действием изгибающего момента в продольном сечении гибкой трубы возникают нормальные напряжения, максимальное значение которых определяется следующим образом:
s x = Mx 1 / Wx 1,
где Мх1 = Кнагр.Р1 R - максимальное значение изгибающего момента, действующего в поперечном сечении, в расчете на единицу длины трубы (значения максимальных моментов и соответствующих коэффициентов нагружения K нагр. приведены выше); Wx 1 = b тр × d 2 тр / 6 - момент сопротивления изгибу поперечного сечения трубы, имеющей длину, равную единице (где dтр - толщина ).стенки трубы; b тр - ширина ее поперечного сечения, в рассматриваемом случае b =1). Моменты сопротивления изгибу для труб различной толщины имеют следующие значения: Толщина стенки трубы d тр, мм 2 2, 5 3 3, 5 4 5 Момент сопротивления изгибу, мм3 0, 667 1, 667 1, 500 2, 040 2, 667 4, 167
Максимальное усилие, приложенное к единице длины трубы, ограничено и определяется максимально допустимыми нормальными напряжениями, возникающими при изгибе за пределом упругости при образовании пластического шарнира. При расчете деталей транспортера и режимов его работы максимальное сжимающее усилие может быть установлено из условия равенства этих напряжений пределу текучести:
s х = s т = Mx 1 / Wx 1 = K нагр. × P 1 R / W х1.
Отсюда величина сжимающей силы Р1, особенности приложения которой к трубе характеризует коэффициент Кнагр, может быть найдена из выражения
Р1 = W х1 × s т / Кнагр. × R
Значения максимальной нагрузки для наиболее распространенных размеров труб приведены ниже: Параметры трубы, мм: наружный диаметр d тр.н 25 25 33 33 44 44 толщина стенки d тр 2 2 3 3 3, 5 3, 5 Предел текучести s т, МПа 480 700 480 700 480 700 Максимальная сжимающая сила Р1, Н/мм: сосредоточенная 87, 5 127, 5 151 220, 2 153, 9 224, 4 распределенная 222, 7 324 383, 4 559, 2 390 570
Примечание. Предел текучести 480 МПа соответствует малоуглеродистым сталям, а 700 МПа - низколегированным. Приведенные значения максимальной сжимающей силы Р1 служат исходными данными при определении максимального тягового усилия инжектора.
Рисунок 3.18 - Расчетная схема приложения нагрузки
Для площадки с координатой j можно записать
qn ( j )= q / cos j
Сила трения, создаваемая на этой площадке,
dF тр = ( q / cos j ) × k × dl
Сила трения, возникающая на поверхности трубы единичной длины, соответствующая углу a охвата ее плашкой,
F тр =
Так как dl = Rтр.н× d j, то при подстановке получаем
F т p =
Для одной плашки высотой h это выражение будет иметь следующий вид:
F т p1 =
В результате преобразований получим
После подстановки значений угла получим выражение для силы трения, создаваемой плашкой на контактной поверхности при изменении угла j от нуля до максимума,
где j max - половина угла охвата трубы плашкой.
Так как угол охвата трубы плашкой составляет 2 j max, то выражение будет иметь вид
В практических расчетах удобнее вычислять силу трения, обеспечиваемую парой плашек, прижатых к трубе с двух противоположных сторон. В результате значение силы трения должно быть удвоено:
Величина распределенной нагрузки q может быть определена как
q = P/h × b = Р /R тр . н × h × 2 × sin j max
После подстановки в (3.8) получим
Таким образом, криволинейный профиль плашки в формуле для определения силы трения может быть учтен с помощью коэффициента
а окончательная формула примет традиционный вид:
Для упрощения расчетов можно пользоваться величиной коэффициента h ф зависящей только от угла охвата трубы плашкой j max: Угол захвата трубы плашкой j max, градус..................................... 20 30 40 50 Коэффициент h ф................................ 1, 042 1, 099 1, 187 1, 320 Угол захвата трубы плашкой j max, градус..................................... 60 70 80 85 Коэффициент h ф...................................................... 1, 521 1, 847 2, 474 3, 143
Максимальное тяговое усилие Qmax, создаваемое транспортером при перемещении трубы, определяется суммой сил трения, создаваемых плашками, находящимися в контакте с поверхностью трубы, т.е.
где n - число пар плашек.
Если усилие прижима плашек к трубе одинаковое, то максимальное тяговое усилие может быть рассчитано по формуле
Величина максимального усилия, прилагаемого к плашке, Р m ах может быть определена исходя из условия прочности трубы, сжатой плашками. При проектировании устройств для перемещения трубы приходится решать обратную задачу - определять необходимое число пар плашек, которые могут обеспечить заданное тяговое усилие. Алгоритм решения этой задачи следующий: • исходя из геометрических размеров поперечного сечения трубы и прочностных свойств материала, из которого она изготовлена, определяют максимально допустимое усилие [Р m ах], которое может быть приложено к плашкам; • по заданной величине тягового усилия транспортера Qmax с учетом коэффициента трения k и предполагаемого угла охвата плашками трубы устанавливают необходимое число пар плашек, которые должны быть прижаты к трубе одновременно. Решение задачи усложнено тем, что транспортер будут использовать с колоннами гибких труб, изготовленных из материалов с различными прочностными характеристиками, поэтому его конструкция должна обеспечивать создание номинального тягового усилия для различных колонн. Для удовлетворения этого условия число плашек следует определять, исходя из условий работы с трубой, имеющей минимальные прочностные характеристики, а размеры гидравлических цилиндров и давления в них, - исходя из максимальных значений этих характеристик:
Рассмотрим решение этой задачи для конкретного случая. Пример. Определим число пар плашек, необходимых для обеспечения тягового усилия 60 кН при диаметре трубы 25 мм. Минимальные прочностные характеристики взяты для труб, изготавливаемых из стали 20 (ГОСТ 1050 - 60), s т = 250 МПа. Момент сопротивления изгибу пластический при толщине стенки dтр = 2 мм, Wx 1 = 0, 667. Картина приложения нагрузки характеризуется Кнагр = 0, 125. Радиус нейтрального слоя R = 11, 5 мм.
P 1 = Wx 1 × s т / K нагр × R тр.н. = (0, 667 × 250)/(0, 125 × 11, 5) = 116 МПа.
При высоте плашки h = 40 мм общее усилие будет
Pmax s min = P1 × h = 116 × 40 = 4640 H.
Угол охвата трубы плашки исходя из конструктивных соображений может быть обеспечен равным 80°, что соответствует значению коэффициента h ф = 2, 474. Приняв коэффициент трения k = 0, 2, определим минимальное число пар плашек
Полученное значение следует округлить до целого числа в сторону увеличения, т.е. п = 14. Если проектируемый транспортер предполагают применять при работе с трубами большего диаметра, например, 33 мм, то максимальное усилие прижима, развиваемое механизмами, нужно определять из условия прочности трубы большего диаметра. Для данных труб Р1 = 559, 2 МПа. При той же высоте плашки
Pmax = P 1 × h = 559.2 × 40 = 22370 H.
|
Последнее изменение этой страницы: 2019-10-03; Просмотров: 306; Нарушение авторского права страницы




 мм.
мм.










 .
. (3.8)
(3.8)




 .
.