|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методические указания к выполнению курсового проектаСтр 1 из 8Следующая ⇒
Методические указания к выполнению курсового проекта
Раздел 1 " Структура и кинематика плоских рычажных механизмов" (лист1) В настоящей разработке содержится пояснения и указания к разделу «Структура и кинематика плоских рычажных механизмов» по теории механизмов и машин. В ней изложены основные сведения о структуре и проектирование плоских рычажных механизмов, кинематические исследование их методом планов, кроме того приведены варианты задания к курсовому проекту. Руководство может использовать при оформлении пояснительной записки курсового проекта по данному разделу. Методические указания по выполнению курсового проекта подготовлено автором соответственно учебной программе по курсу " Теории механизмов и машин" для технических инженерных специальностей.
Структурный анализ плоских механизмов 1.1. Основные понятия и определения Механизмом называется механическая система, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел. Тела, входящие в эту систему в ТММ, называют звеньями, а подвижные их соединения - кинематическими парами. Свободное тело в пространстве имеет 6 возможных (3 поступательные и 3 вращательные) движений, т.е. 6 степеней свободы. Ограничивая одно, два, … пять движений, можно получить кинематические пары 1, 2, 3, 4, 5 классов. Несколько звеньев, соединенных между собой подвижно, образуют кинематическую цепь. Если звенья кинематической цепи совершают движение параллельно одной плоскости, т.е. плоскопараллельное движение, кинематическую цепь называют плоской, а механизм - плоским механизмом.
Формула строения механизма
Кинематический и силовой анализы механизма проводить методом планов удобно, если он состоит только из низших пар. Такой механизм рассматривают как цепь, полученную присоединением к ведущему звену и стойке одной или нескольких цепей, степени подвижности которых равны нулю. Кинематические цепи с нулевой степенью подвижности получили название групп Ассура. Простейшие группы Ассура - это два подвижных звена, образующие три пары - двухповодковые группы. Так кривошипно-шатунный механизм (рис 1.1) получен присоединением к ведущему звену 1 и стойке 0 двухповодковой группы (2 - 3). Формула строения этого механизма: I → II ( 2 – 3 ). Пример 3. Дана кинематическая цепь рис. 1.3, в которой задано движение w1 ведущего звена. Выяснить: является ли эта кинематическая цепь механизмом.
Решение: 1. Число подвижных звеньев кинематической цепи n = 5 (таб.1.5); 2. Количество кинематических пар р5 = 7 (таб.1.6); 3. Степень подвижности кинематической цепи: По формуле (1.1): W = 3 · 5 - 2 · 7 = 1, т.е. кинематическая цепь представляет собой механизм.
Таблица 1.5 - Название звеньев кинематической цепи
Таблица 1.6 - Условные изображение и класс кинематических пар
Механизм получен присоединением к ведущему звену 1 и стойке 0 группы (2 – 3). Формула строения при этом:
I → II (2 - 3). Это кулисный механизм. Дополнив его двухповодковой группой (4 - 5), получим более сложный механизм. Окончательная формула его строения:
I → II (2 – 3) → II (4 - 5). Пример 4. Дана кинематическая цепь рис. 1.4, в которой задано движение w1 ведущего звена. Выяснить: является ли эта кинематическая цепь механизмом. Аналогично как на предыдущем примере 3, повторив пункты 1 - 3, заполним таблицы 1.7 и 1.8.
Таблица 1.7 - Название звеньев кинематической цепи
Таблица 1.8 - Условные изображение и класс кинематических пар
Из таблицы 1.8 следует Р4 = 0, Р5 = 7. По формуле (1.1): W = 3 · 5 - 2 · 7 = 1,
т.е. кинематическая цепь представляет собой механизм. Механизм получен присоединением к ведущему звену 1 и стойке 0 группы (2 – 3). Формула строения при этом: I → II (2 - 3) Получен шарнирный четырехзвенный механизм. Дополнив его двухповодковой группой (4 - 5), получим более сложный механизм. Окончательная формула его строения: I → II (2 – 3) → II (4 - 5)
Шарнирный четырехзвенник
Пусть даны: - расстояния между осями кривошипа и коромысла, - длина коромысла, - размах (крайние положения) качания коромысла, Найти: длины кривошипа Решение.
1. Приняв масштаб длин 2. Построим положения центров вращения кривошипа О и коромысла С. 3. Отложив от горизонтали в точке С углы
4. Соединим 5. Размеры кривошипа (ОА) и шатуна (АВ), на чертеже определяется по формулам:
6. Действительные их длины:
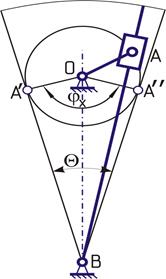
По найденным размерам построена кинематическая схема (ОАВС) механизма (рис. 1.5). Кулисный механизм Пусть даны:
- длина кривошипа, - коэффициент изменения скорости kV, - Найти межосевое расстояние Решение: 1. Угол размаха кулисы Q найдем по известной формуле:
2. Межосевое расстояния
3. Приняв масштаб длин
По найденным размерам строим кинематическую схему кулисного механизма. 4. Отметим положения центров вращения кривошипа О и кулисы В. 5. Через центр О проводим окружность радиусом (ОА) т.е. траекторию точки А звена 1. 6. От точки В к окружности проводим касательные линии - крайние положения кулисы. Кинематическая исследование плоских рычажных механизмов методом планов 2.1. Исходные предпосылки а ) Кинематическая пара V класса вращательная Подвижное соединение звеньев 1 и 2, в точке А - центр шарнира. Точка А1 принадлежит звену 1, а А2 - звену 2.
В соединении точки А1 и А2 имеют одинаковые траектории и поэтому всегда справедливо:
б) Кинематическая пара V класса поступательная
П3, П4 - плоскости жестко связанные со звеньями соответственно 3 и 4, В3, В4 – точки, принадлежащие звеньям 3 и 4. Только в рассматриваемый момент они совпадают, поэтому:
Деформации звеньев не учитывают, т.е. допускают, что они абсолютно жесткие в) Сложное движение одного звена
Сложное движение рассматривают как сумму переносного (вместе с какой-либо точкой) и релятивного (относительно этой точки) движении.
Пусть даны: ℓ АВ, wАВ, e АВ, Найти: Решение: Векторное уравнения абсолютного движения точки В имеет вид:
т.е. сложное движение точки В - это сумма движений вместе с А (переносное) и вращение вокруг А (относительное). План скоростей Полюс плана скоростей обозначают p, масштаб скоростей выбирают так, чтобы известные векторы были показаны длиной (40 ¸ 80) мм. Так по известной величине

Последовательность построения плана скоростей
Соединив точку в с полюсом р можно найти
План ускорения Возможное движение точки В относительно А - вращательное. Поэтому выражение (2.5) примет вид:
Полюс плана ускорений обозначают p, масштаб ускорений - m Формула для построения плана ускорении (2.6). В этом уравнении неизвестны и величина и направление
Последовательность построения плана ускорения.
1.
1.
Соединив полученную точку в с p, можно найти:
Рисунок 2.4 - Кинематика звеньев в поступательной паре |
Построение плана ускорения
По условию даны и величина и направление ускорений  и
и  (рис.2.4, в). Величина ускорения Кориолиса
(рис.2.4, в). Величина ускорения Кориолиса  равна удвоенному произведению угловой скорости переносного движения на одноимённую относительную скорость, для рассматриваемого случая
равна удвоенному произведению угловой скорости переносного движения на одноимённую относительную скорость, для рассматриваемого случая
 (2.9)
(2.9)
Для определения направления ускорения Кориолиса следует повернуть на 900 вектор одноимённой относительной скорости
(в рассматриваемом случае  , но не
, но не  ) по направлению переносного вращательного движения (в рассматриваемом случае по w3). Кратко вышеприведенное записывается в виде
) по направлению переносного вращательного движения (в рассматриваемом случае по w3). Кратко вышеприведенное записывается в виде
 , (2.10)
, (2.10)
 направлена от а3 к а4 - вверх. Поворачивая на 900 этот вектор по часовой стрелке (направление w3), (pис.2.4, г) получим направление
направлена от а3 к а4 - вверх. Поворачивая на 900 этот вектор по часовой стрелке (направление w3), (pис.2.4, г) получим направление  .
.
Таким образом, определены и направления и величины всех векторов правой части (2.8), т.е. графическое его решение (построение векторного четырехугольника) возможно.
 1. Из произвольно выбранного полюса p проводится линия 1 параллельно
1. Из произвольно выбранного полюса p проводится линия 1 параллельно  (рис.2.4, д) на этой линии откладывается:
(рис.2.4, д) на этой линии откладывается:

 2. Из этой а3 проводится линия 2 параллельно
2. Из этой а3 проводится линия 2 параллельно  . На этой линии откладывается:
. На этой линии откладывается:

 3. Из полученной точки к проводится линия 3 параллельно
3. Из полученной точки к проводится линия 3 параллельно  на которой откладывается
на которой откладывается

4. Соединив a4 с p, можно вычислить  .
.
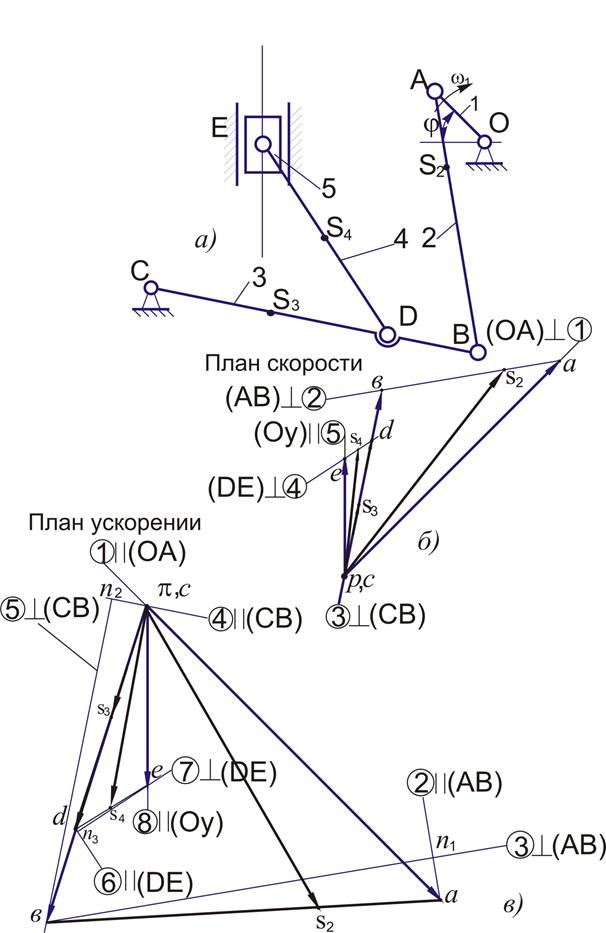
Пример кинематического анализа
План скоростей
Рассматривая движение точки B вместе со звеньями 2 и 3 и основываясь на ранее приведенную формулу 2.4, напишем уравнения:
 и
и
 .
.
Приравняв их правые части, получим уравнения, в котором два неизвестных (величины  и
и  ), т.е. построение этого векторного многоугольника возможно.
), т.е. построение этого векторного многоугольника возможно.
 . (2.14)
. (2.14)
Принимаем (pa) = 90мм.
Тогда:  .
.
Последовательность построения плана скоростей
1.  Из полюса p (рис.2.6, б) проводим линию 1 ^ (ОА) и на ней откладываем (ра ) = 90 мм – вектор
Из полюса p (рис.2.6, б) проводим линию 1 ^ (ОА) и на ней откладываем (ра ) = 90 мм – вектор  ;
;
2.  Через точку а проводим линию 2 ^ (AВ) – вектор
Через точку а проводим линию 2 ^ (AВ) – вектор  ;
;
3. 
 Поскольку
Поскольку  , точка c ≡ p.Через c проводим вектор
, точка c ≡ p.Через c проводим вектор  - линию 3, перпендикулярную (CВ), которая с линией 2 пересечется в точке в;
- линию 3, перпендикулярную (CВ), которая с линией 2 пересечется в точке в;
4. Пользуясь приведенной в разделе 2.2.3 зависимостью на линии (рв) откладываем  - вектор
- вектор  , где длина (рв) взята из построенного плана скорости, а (СВ) и (АВ) - из кинематической схемы механизма (рис.2.6, а).
, где длина (рв) взята из построенного плана скорости, а (СВ) и (АВ) - из кинематической схемы механизма (рис.2.6, а).
|
Рисунок 2.6 - Кинематический анализ рычажного механизма |
План ускорения
Уравнение движения В получим, рассматривая движение звеньев 2 – 3, основываясь на формулу (2.5)

 ,
,
 .
.
Известны и величины и направления  и
и  .
.
Кроме того:
 ║ (А → В),
║ (А → В),  ^(АВ),
^(АВ),
 ║ (В → С),
║ (В → С),  ^(ВС).
^(ВС).
После построения плана скоростей:


Приравняв, правые их части уравнений (2.15) получим
 , (2.16)
, (2.16)
которое можно реализовать, т.е. возможно построение векторного многоугольника.
Принимаем (p а)= 125 мм, тогда:
Последовательность построения плана ускорений:
 1. Из полюса p (рис.2.6, в) проводим линию 1 ç ê (А ® О) и на ней откладываем ( p а1)=125 мм - вектор
1. Из полюса p (рис.2.6, в) проводим линию 1 ç ê (А ® О) и на ней откладываем ( p а1)=125 мм - вектор  ;
;
 2. Из точки а проводим линию 2 ç ê (АВ) причем от В к А (В ® А) и на ней откладываем
2. Из точки а проводим линию 2 ç ê (АВ) причем от В к А (В ® А) и на ней откладываем  - вектор
- вектор  ;
;
 3. Через точку n 1 проводим линию 3 ^ (АВ) - вектор
3. Через точку n 1 проводим линию 3 ^ (АВ) - вектор  ;
;
Этим заканчивается построение левой части уравнения (2.16).
Методические указания к выполнению курсового проекта
Раздел 1 " Структура и кинематика плоских рычажных механизмов" (лист1)
В настоящей разработке содержится пояснения и указания к разделу «Структура и кинематика плоских рычажных механизмов» по теории механизмов и машин. В ней изложены основные сведения о структуре и проектирование плоских рычажных механизмов, кинематические исследование их методом планов, кроме того приведены варианты задания к курсовому проекту. Руководство может использовать при оформлении пояснительной записки курсового проекта по данному разделу.
Методические указания по выполнению курсового проекта подготовлено автором соответственно учебной программе по курсу " Теории механизмов и машин" для технических инженерных специальностей.
Последнее изменение этой страницы: 2019-06-08; Просмотров: 230; Нарушение авторского права страницы












 .
. .
. 
 и шатуна
и шатуна  , обеспечивающие заданный размах коромысла.
, обеспечивающие заданный размах коромысла. найдем
найдем 
 и
и  найдем крайние положения коромысла 3, соответственно - крайние положения
найдем крайние положения коромысла 3, соответственно - крайние положения  и
и  ,
, 
 ; (1.2)
; (1.2)
 ,
,  .
. ; (1.3)
; (1.3) ; (1.4)
; (1.4) определяем на чертеже размеры длин кривошипа (ОА) и межосевого расстояния (ОВ)
определяем на чертеже размеры длин кривошипа (ОА) и межосевого расстояния (ОВ) .
.
 (2.1)
(2.1)
 (2.2)
(2.2)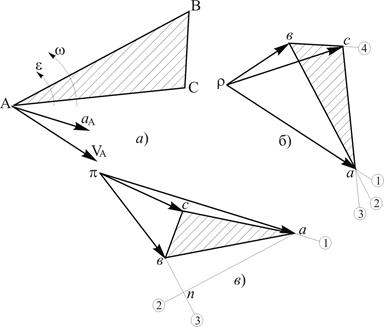
 ,
,  А (рис. 2.3)
А (рис. 2.3)  ,
,  , (2.3)
, (2.3) (2.4)
(2.4) 1. Из принятого полюса р (pис.2.3, б) проводится лини я 1 параллельно
1. Из принятого полюса р (pис.2.3, б) проводится лини я 1 параллельно  , на которой отложен отрезок (ра) = 60 мм. Получен вектор
, на которой отложен отрезок (ра) = 60 мм. Получен вектор  - первое слагаемое правой части (2.4).
- первое слагаемое правой части (2.4). 2. Из полученной точки а проведена линия 2 перпендикулярно (АВ), (см. рис. 2.3, б) на которой отложен
2. Из полученной точки а проведена линия 2 перпендикулярно (АВ), (см. рис. 2.3, б) на которой отложен
 .
. . (2.6)
. (2.6) .
. В. Поэтому построение векторов следует начать с правой части уравнения.
В. Поэтому построение векторов следует начать с правой части уравнения. Из принятого полюса p проводится (p а)║ аA - линия 1 ║ аA (рис.2.3,
Из принятого полюса p проводится (p а)║ аA - линия 1 ║ аA (рис.2.3,  ) и строится
) и строится .
. 2. Из точки a проводится линия 2, представляющая собой
2. Из точки a проводится линия 2, представляющая собой ║ (В → A).
║ (В → A). Такая запись конкретизирует направление: параллельно (АВ) и направлено от В к А (рис.2.3,
Такая запись конкретизирует направление: параллельно (АВ) и направлено от В к А (рис.2.3, 
 .
. Из полученной точки n проводится прямая 3 ^ (AB) по направлению wВА. На этой линии отложен:
Из полученной точки n проводится прямая 3 ^ (AB) по направлению wВА. На этой линии отложен:  .
.