|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Шестизвенного плоского механизма
Пример1. Дана кинематическая цепь (рис. 1.7), известна средняя скорость ведомого звена 5 Решение: Кинематический анализ начинаем с определения скорости ведущего звена. Пользуясь формулами, приведенными в разделе 1.4.3 найдем:
Построение планов скоростей и ускорений следует начать для группы, присоединённой непосредственно к ведущему звену, т.е. звеньев 2-3: Принимая во внимание, приведенные положения в предыдущих разделах, напишем:
План скоростей Рассматривая движение точки А3 вместе со звеньями 2 и 3 и основываясь на ранее приведенные формулы 2.3 и 2.7, напишем уравнения: Приравняв их правые части, получим уравнение 2.10, в котором два неизвестных (величины
Принимаем (pa 1) = 55 мм. Тогда масштаб скорости
Последовательность построения плана скоростей
4. Пользуясь положением, приведенным в разделе 2.4 на линии (ра3) откладываем Следующий этап - исследование движения звеньев 4 – 5, где уравнения движения имеет вид:
Построение векторного многоугольника этого уравнения:
6. 7. Вектор скорость центра тяжести звена 3
По результатам построения вычисляем:
План ускорения Уравнение движения А3 получим, рассматривая движение звеньев 2 – 3, основываясь на формулы (2.4) и (2.8)
Известны и величины и направления Кроме того:
После построения плана скоростей:
Приравняв, правые их части уравнений (2.12) получим
которое можно реализовать, т.е. возможно построение векторного многоугольника. Принимаем (p а1)= 122 мм, тогда:
Последовательность построения плана ускорений:
Этим заканчивается построение левой части уравнения (2.13)
6. Соединяем полюс p с точкой a 3. На ней откладываем длину вектора
По результатам построений получим:
Таким образом построен план ускорений группы Ассура, включающей звенья 2 - 3. Векторное уравнение для построения плана ускорения группы 4 - 5 составим на основании формулы (2.8)
Поскольку w 4= 0, величина
8. Для определения ускорения точки центра масс звена 3 производим вычисление По результатам построения вычисляем:
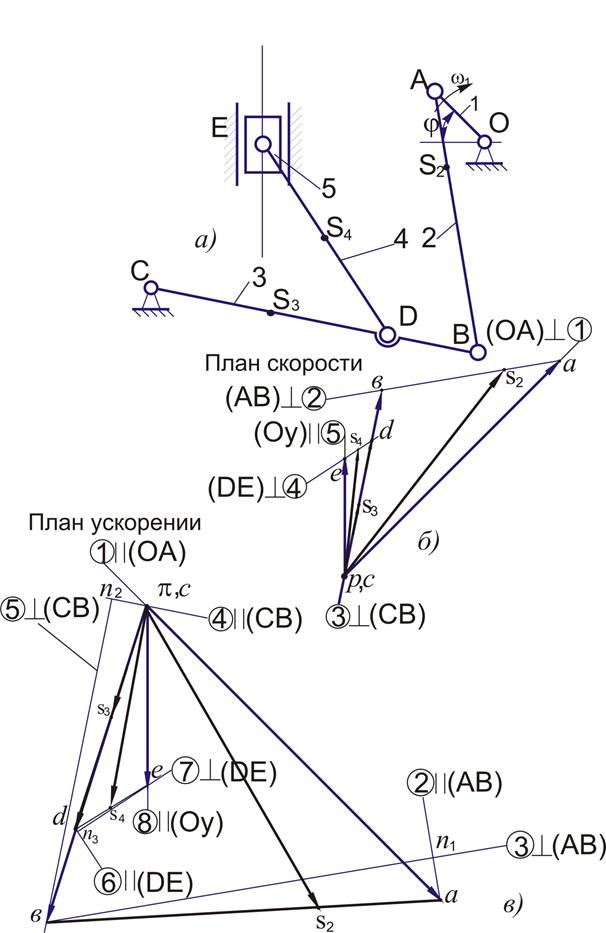
Таким образом, вращательное движение звена 1 с постоянной частотой w1 преобразуется посредством звеньев 2, 3, 4, в возвратно- поступательное движение звена 5, которое в рассматриваемом положении движется замедленно вправо со скоростью Пример 2. Дана кинематическая цепь (рис. 1.8), известны размеры звеньев, положение ведущего звена φ 1 и средняя скорость ведомого звена 5
Построение планов скоростей и ускорений следует начать для группы, присоединённой непосредственно к ведущему звену, т.е. звеньев 2 - 3: На основании положений, приведенных в разделе 2.1 составим исходные данных:
План скоростей Рассматривая движение точки B вместе со звеньями 2 и 3 и основываясь на ранее приведенную формулу 2.4, напишем уравнения: Приравняв их правые части, получим уравнения, в котором два неизвестных (величины
Принимаем (pa) = 90мм. Тогда:
Последовательность построения плана скоростей
1. 2. 3. 4. Пользуясь приведенной в разделе 2.2.3 зависимостью на линии (рв) откладываем
Последнее изменение этой страницы: 2019-06-08; Просмотров: 215; Нарушение авторского права страницы Главная | Случайная страница | Обратная связь |
 . Найти его скорость и ускорение звена 5 при заданном положение ведущего звена 1 φ 1=60°.
. Найти его скорость и ускорение звена 5 при заданном положение ведущего звена 1 φ 1=60°. ,
,  .
. ,
, 

 .
. и
и .
. и
и  ), т.е. построение этого векторного многоугольника, возможно.
), т.е. построение этого векторного многоугольника, возможно. (2.10)
(2.10) .
. 1. Из полюса p (рис. 2.5, б) плана скоростей проводим линию 1 ^ (ОА) и на ней откладываем (ра1) = 55 мм - вектор
1. Из полюса p (рис. 2.5, б) плана скоростей проводим линию 1 ^ (ОА) и на ней откладываем (ра1) = 55 мм - вектор 
 2. Через точку а1, 2 проводим линию 2 ï ê (АВ) - вектор
2. Через точку а1, 2 проводим линию 2 ï ê (АВ) - вектор  ;
; 
 3. Поскольку
3. Поскольку  , точка в ≡ p.Через в проводим вектор
, точка в ≡ p.Через в проводим вектор  - линию 3 перпендикулярную (АВ), которая с линией 2 пересечется в точке а3.
- линию 3 перпендикулярную (АВ), которая с линией 2 пересечется в точке а3. - вектор
- вектор  , где длина ( ра3 ) взята из построенного плана скорости, а (ВС) и (ВА) - из кинематической схемы механизма (рис. 2.5, а).
, где длина ( ра3 ) взята из построенного плана скорости, а (ВС) и (ВА) - из кинематической схемы механизма (рис. 2.5, а). ,
,  ï ê (Ох). (2.11)
ï ê (Ох). (2.11) 5. Через точку с3 проводим линию 4 ï ê (Оу) – вектор
5. Через точку с3 проводим линию 4 ï ê (Оу) – вектор  ;
; 

 Через полюс р проводим линию 5 ï ê (Ох) – направление
Через полюс р проводим линию 5 ï ê (Ох) – направление  . В пересечении линии 4 и 5 получится точка с5.
. В пересечении линии 4 и 5 получится точка с5. найдем из равенства
найдем из равенства откуда
откуда  Отложив отрезок (ps 3) от полюса p на линию ( p а 3 ) получим вектор скорости
Отложив отрезок (ps 3) от полюса p на линию ( p а 3 ) получим вектор скорости 
 ,
,  ,
,  ,
,  ,
,  ,
,  .
.
 ,
,  .
. и
и  .
. ,
,  ║ (AВ),
║ (AВ),  ║ (А → В),
║ (А → В),  ^(АВ).
^(АВ). ,
,  .
. , (2.13)
, (2.13) .
. 1. Из полюса p (рис.2.5, в) проводим линию 1 ç ê (А®О) т.е. параллельно (АО) и направленную от точки А к центру О. На ней откладываем ( p а1 )=122 мм, таким образом получаем вектор
1. Из полюса p (рис.2.5, в) проводим линию 1 ç ê (А®О) т.е. параллельно (АО) и направленную от точки А к центру О. На ней откладываем ( p а1 )=122 мм, таким образом получаем вектор  2. Из точки а1 (рис. 2.5, в) проводим линию 2
2. Из точки а1 (рис. 2.5, в) проводим линию 2  и на ней откладываем
и на ней откладываем  в сторону направления вращения w 3, таким образом получаем вектор
в сторону направления вращения w 3, таким образом получаем вектор  ;
;  3. Через точку k проводим линию 3 ç ê (АВ) - вектор
3. Через точку k проводим линию 3 ç ê (АВ) - вектор  ;
;  4. Из полюса p проводим линию 4 ç ê (А®B) и на ней откладываем
4. Из полюса p проводим линию 4 ç ê (А®B) и на ней откладываем  - вектор
- вектор 
 5. Через n1 проводим линию 5 ^ (АВ) вектора
5. Через n1 проводим линию 5 ^ (АВ) вектора 
 .
. ,
,  .
. и
и  ç ê (Ох),
ç ê (Ох),  , направление и величина
, направление и величина  определены выше, направление
определены выше, направление  ç ê (Oу) остается найти величины
ç ê (Oу) остается найти величины  ,
,  , т.е. два неизвестных в уравнении. Следовательно, решение (построение векторного четырехугольника) возможно.
, т.е. два неизвестных в уравнении. Следовательно, решение (построение векторного четырехугольника) возможно. 7. Из точки c 3 проводим линию 6 ç ê (Oу) вектора
7. Из точки c 3 проводим линию 6 ç ê (Oу) вектора  ;
; 
 8. Через полюс p проводим линию 7 ç ê (Ох) направление вектора ускорения
8. Через полюс p проводим линию 7 ç ê (Ох) направление вектора ускорения  и откладываем от полюса p на линию ( p а 3 ) - вектор
и откладываем от полюса p на линию ( p а 3 ) - вектор  ;
; 


 и ускорением
и ускорением 
 . Найти скорость и ускорение звена 5 при заданном φ 1=45°. Решение: Кинематический анализ начинаем с определения скорости ведущего звена, подставив данные, полученные в разделе 1.4.3.
. Найти скорость и ускорение звена 5 при заданном φ 1=45°. Решение: Кинематический анализ начинаем с определения скорости ведущего звена, подставив данные, полученные в разделе 1.4.3.
 .
.


 .
. и
и .
. и
и  ), т.е. построение этого векторного многоугольника возможно.
), т.е. построение этого векторного многоугольника возможно. . (2.14)
. (2.14) .
. Из полюса p (рис.2.6, б) проводим линию 1 ^ (ОА) и на ней откладываем (ра ) = 90 мм – вектор
Из полюса p (рис.2.6, б) проводим линию 1 ^ (ОА) и на ней откладываем (ра ) = 90 мм – вектор  ;
;  Через точку а проводим линию 2 ^ (AВ) – вектор
Через точку а проводим линию 2 ^ (AВ) – вектор  ;
; 
 Поскольку
Поскольку  , точка c ≡ p.Через c проводим вектор
, точка c ≡ p.Через c проводим вектор  - линию 3, перпендикулярную (CВ), которая с линией 2 пересечется в точке в;
- линию 3, перпендикулярную (CВ), которая с линией 2 пересечется в точке в;  - вектор
- вектор  , где длина (рв) взята из построенного плана скорости, а (СВ) и (АВ) - из кинематической схемы механизма (рис.2.6, а).
, где длина (рв) взята из построенного плана скорости, а (СВ) и (АВ) - из кинематической схемы механизма (рис.2.6, а).