Канал измерения дальности
Бортовое оборудование воздушного судна посылает запрос, от наземного оборудования получает ответ, по величине задержки ответа относительно запроса определяется дальность.
Радиомаячные системы посадки метрового диапазона: назначение, решаемые задачи , классификация, размещение относительно ВПП, основные параметры
Радиомаячная система (РМС) инструментального захода ВС на посадку метрового диапазона волн - это совокупность наземных и бортовых радиотехнических устройств, обеспечивающих экипаж информацией о положении ВС относительно курса посадки и глиссады снижения, а также информирующих экипаж о пролёте маркированных точек на предпосадочной прямой.
В зависимости от сложности метеоусловий, в которых возможно использование РМС, они подразделяются на системы первой, второй и третьей категории (РМС-1, РМС-2, РМС-3).
• РМС-1 обеспечивает экипаж ВС достоверной информацией в процессе посадки от границы зоны действия РМС до точки на глиссаде, в которой она пересекается с линией курса на высоте 60 метров относительно горизонтальной плоскости, проходящей через порог ВПП.
• РМС-2 обеспечивает экипаж ВС достоверной информацией в процессе посадки от границы зоны действия РМС до точки на глиссаде, в которой она пересекается с линией курса на высоте 30 метров относительно горизонтальной плоскости, проходящей через порог ВПП.
• РМС-3 обеспечивает экипаж ВС достоверной информацией в процессе посадки от границы зоны действия РМС до поверхности ВПП и вдоль неё (при этом бывает необходимо вспомогательное оборудование).
В состав наземного оборудования РМС должны входить:
- курсовой радиомаяк (КРМ) - передающее устройство с антенной системой. Антенная система КРМ размещается на продолжении оси ВПП в противоположной направлению посадки стороне на удалении от 400 до 1150 метров от порога ВПП. При этом боковое смещение антенн недопустимо.
- глиссадный радиомаяк (ГРМ) - передающее устройство с антенной системой. Антенная система ГРМ размещается у начала ВПП (на удалении 450...2000 метров от порога) со стороны захода на посадку на расстоянии 120... 180 метров от её оси в сторону грунтовой части лётного поля. Такое размещение ГРМ обеспечивает необходимую высоту средней линии глиссады над порогом ВПП - высоту опорной точки.
- маркерные радиомаяки (МРМ)
называемый ближним радиомаркером (БРМ), устанавливают на оси ВПП на расстоянии 1000 м от начала ВПП по направлению захода на посадку. Второй – дальний радиомаркер (ДРМ) – устанавливают также на продолжении оси ВПП на расстоянии 4000 м от начала ВПП.
В системах ILS (Instrument Landing System – инструментальные сис- темы приземления) используются три маркерных радиомаяка (МРМ), ко- торые называются внешним, средним и внутренним (или ближним).Средний МРМ размещается на расстоянии 1050 м от начала ВПП, его сигналы модулируются с частотой 1300 Гц и манипулируются последова- тельностью чередующихся точек и тире (6 точек/с и 2 тире/с).
Задачи:
привод ЛА в район аэродрома посадки;
организация четкого управления движением ЛА в районе аэродрома;
обеспечение непосредственно самой посадки ЛА.
Технические средства посадки должны позволять надежно пилотировать ЛА к месту посадки по определенной линии планирования и давать ему возможность производить посадку независимо от условий видимости. Это требует задания для ЛА плоскости посадочного курса (рис. 1), плоскости планирования и удаления ЛА от оптимальной точки посадки на взлетно-посадочной полосе (ВПП). Задание двух плоскостей позволяет пилотировать ЛА по определенной линии планирования (глиссаде). Знание же расстояния до точки касания необходимо для регулирования режима полета ЛА при снижении.
Вопрос 8.
Бортовое навигационно-посадочное устройство объединяет в себе два радиоприемника: курсовой и глиссадный. Курсовой радиоприемник принимает, усиливает и преобразует ВЧ-сигналы курсовых радиомаяков навигационных систем VOR и курсовых радиомаяков посадочных систем ILS и СП-50 в диапазоне частот 108…118 МГц. Выбор рабочей частоты радиомаяков VOR или ILS осуществляется в зависимости от радионавигационных устройств органами управления с пульта управления, комплексных пультов радиотехнических систем либо боковых панелей дисплеев PFD или MFD.
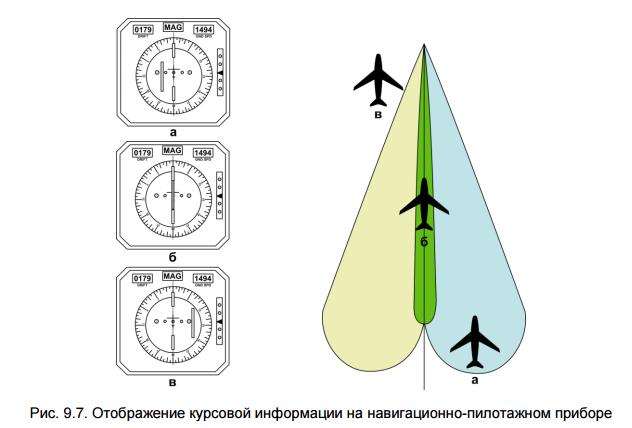
При работе курсового приемника в режиме «ILS» от него на вход блока посадки поступает два сигнала с частотами 90 и 150 Гц. Разность амплитуд сигналов после их детектирования будет зависеть от положения ВС относительно равносигнальной линии курса и пропорциональна угловому отклонению ВС от оси ВПП в горизонтальной плоскости. Эта разность амплитуд в виде постоянного напряжения ΔUк подается на курсовую планку навигационно-пилотажного прибора и отклоняет ее (рис. 9.7). Положение курсовой планки на рис. 9.7, а характеризует нахождение самолета правее линии курса, на рис. 9.7, в – левее линии курса, на рис. 9.7, б – точно на курсе.
Вопрос 9.
При работе глиссадного радиоприемника от него на вход блока посадки также поступает два сигнала с частотами 90 и 150 Гц. Разность амплитуд этих сигналов будет зависеть от положения ВС относи- тельно равносигнальной линии глиссады и пропорциональна угловому отклонению ВС от глиссады в вертикальной плоскости. Эта разность амплитуд в виде постоянного напряжения ΔUг подается на треугольный индекс глиссады навигационно-пилотажного прибора или ромбический индекс слева от шкалы барометрического высотомера (рис. 9.8) в системе Garmin G 1000 и пере- мещает их вдоль глиссадной шкалы. 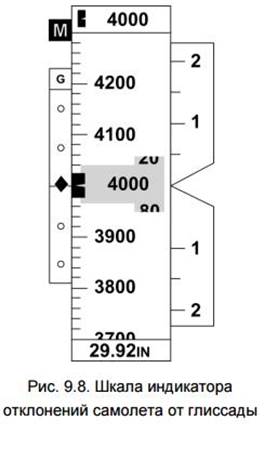
10.Бортовая аппаратура навигации и посадки: принцип работы в режиме посадки по системе ILS (маркерный канал).
Маркерный радиомаяк (МРМ) вместе с бортовым маркерным радиоприемником (МРП) образуют канал, фиксирующий момент пролета ЛА характерных участков на заданной траектории в виде световой, звуковой и тональной информации. Три маркерных радиомаяка — дальний (ДМРМ), средний (СМРМ) и ближний (БМРМ) — устанавливаются на определенных расстояниях от начала ВПП со стороны захода ЛА на посадку. Размещение радиомаяков системы ILS и параметры их сигналов регламентированы ИКАО.
Формирование сигналов в маркерном канале осуществляется путем излучения высокочастотных колебаний, модулированных по амплитуде и манипулированных определенным кодом в соответствии с местом расположения МРМ. В системе СП-50 при двухмаркерном варианте ВЧ-сигналы БМРМ и ДМРМ модулированы частотой 3000 Гц, но отличаются манипуляцией: точки в БМРМ и тире в ДМРМ. Поэтому звуковой генератор в зависимости от назначения МРМ создает одну из трех частот: F1=400, F2=1300 и F3=3000 Гц. Соответственно с манипулятора идет последовательность точек, либо последовательность чередующихся тире и точек, либо последовательность тире. Глубина модуляции составляет (95±4)%. Маркерные радиомаяки работают на частоте 75 МГц. Они излучают вертикально вверх кодированные сигналы с диаграммой направленности в виде конуса (факела). В момент пролета над радиомаяком сигналы принимаются на ЛА маркерным радиоприемником и поступают с его выхода на сигнальную лампочку и электрозвонок. Время индикации звуковой сигнализации зависит от высоты полета и скорости пролета ЛА над маяком. Пилот, наблюдая за характером горения лампочки и прослушивая код сигнала по звонку, судит о дальности до ВПП.
11) Бортовая аппаратура радиомаячной системы ILS: назначение, решаемые задачи, принцип работы, состав и размещение на ВС, основы эксплуатации.
Заход на посадку по ILS. В инструментальную систему посадки ILS входит:
-курсовой приемник
-глиссадный приемник
-маркерный приемник
-указатели курса и глиссады
| На самолете сигналы, излучаемые КРМ, принимаются курсовым радиоприемником (КРП), преобразуются в сигнал постоянного тока DК, пропорциональный угловому отклонению самолета от плоскости посадочного курса, с полярностью, определяемой стороной отклонения. Сигнал DК отклоняет вертикальную стрелку прибора постоянного тока – стрелочного индикатора положения (СИП) системы посадки .
Сигналы, излучаемые ГРМ, принимаются бортовым глиссадным радиоприемником (ГРП) и преобразуются в нем в сигнал постоянного тока , значение и полярность которого характеризуют угловое отклонение и сторону отклонения самолета от плоскости планирования. Этот сигнал отклоняет горизонтальную стрелку индикатора
|
|
12) Радиомаячная система посадки дециметрового дивапазона КАТЕТ: назначение, решаемые задачи, состав, размещение относительно впп.
Система включает в себя ГРМ И КРМ (иногда МРМ)
КРМ (localizer) работает в том же диапазоне частот что и VOR и с помощью 2-х диаграмм направленности создает в пространстве равносигнальную зону задающую плоскость курса.
ГРМ (glide slope transmitter) работает на частотах от 329-335 МГц и аналогичным образом задает в пространстве наклонную плоскость глиссады.
Бортовое оборудование работающее с РМС, например «Курс-МП», позволяет экипажу непрерывно определять отклонение от курса и глиссады.
На приборе типо ПНП (плановый навигационный прибор) или аналогичным , вертикальная и горизонтальная планки показывают положение курса и глиссады.
Так-же могут быть установленны маркерные радиомаяки (МРМ), которые предназначенны для фиксирования пролета точек в которых они установленны.
МРМ излучают радиоволны вверх в пределах параболического конуса.
|
|
|
| При попадании ВС в конус, на борту раздается звуковой сигнал.
ILS может включать в себя три маркера установленных на предпосадочной прямой.
- Внешний маркер (Outer marker), 7км от порога ВПП.
- Средний маркер (Middle marker), 1км от порога ВПП.
- Внутренний маркер (Inner marker), 50-100метров от порога ВПП.
При наличии на борту соответствующего оборудования, заход на посадку по РМС может выполняться в следующих режимах :
1. Штурвальный режим ( ПСП- прибор системы посадки )
Планки показывают отклонение по курсу и глиссаде.
2. Директорный режим (ПКП)
Система директорного управления с учетом фактического курса ВС и вертикальной скорости формирует команды на отклонение рулей, которые индуцируются на пилотажно-командном приборе.
3) Автоматическией режим.
команды автоматически реализуются бортовой системой авотоматического управления.
13) Микроволновые системы посадки : назначение , состав, размещение, принципы функционирования, эксплуатационно-технические показатели, преимущества по сравнению с системами метрового диапазона.
Микроволновая система посадки, МСП ( англ. microwave landing system, MLS, [1] ; наименование в России —радиомаячная система инструментального захода летательных аппаратов на посадку сантиметрового диапазона волн [2] [3] , сокращённо – система посадки сантиметрового диапазона, или МЛС) — в авиации — радионавигационная система захода на посадку , использующая сантиметровые волны. Более современный вариант курсо-глиссадных систем , чем ILS.
При работе систем ILS используются радиоволны метрового диапазона, которые подвержены сильному влиянию интерференции от препятствий и неровностей рельефа. Также такие системы имеют недостаточно высокую точность, особенно, по новейшим требованиям.
Системы MLS разрабатываются с 1970-х годов. В них используются радиоволны с частотой 1 и 5 ГГц. Также как и в системах ILS, на ВПП устанавливается два радиомаяка MLS. Один из них отвечает за определение самолетом азимута, другой — за определение угла места. В отличие от ILS, сигналы MLS имеют узкую диаграмму направленности и сканируют своим лучом широкий сектор с известной скоростью.
В отличие от ILS, в микроволновой системе доступно несколько каналов, за счет чего несколько маяков MLS не мешают работе друг друга.
Типовой комплект MLS состоит из двух наземных радиомаяков MLS, один из которых задает траекторию приближения к ВПП по углу места, а второй – по азимуту. Система MLS позволяет определять отклонение от траектории не только посадки, но также и взлета/ухода на второй круг.
В зависимости от комплектации, MLS может использоваться в условиях погодного минимума I, II, III категории ICAO .
В состав системы входят 2-3 приемника и антенно-фидерное устройство, включающее несколько антенн, делитель мощности и антенные усилители. Функция бортового приемника - прием и обработка сигналов азимута, угла места, а также данных, передаваемых наземной станцией MLS. В последнее время появились многофункциональные приемники, способные принимать сигналы нескольких типов радиомаяков, например: ILS , MLS и VOR .
Бортовое радиотехническое оборудование посадки MLS должно обеспечивать при работе с наземными маяками:
● определение положения ЛА по азимуту, углу места и дальности относительно соответствующих маяков;
● определение положения самолета относительно заданной траектории с требуемой точностью и до высот, соответствующих посадочному минимуму, установленному для данного типа ЛА ;
● выдачу азимутальной, угломестной и дальномерной информации и информации об отказах для визуальной индикации экипажу и в виде электрических сигналов в другое бортовое оборудование, если эти сигналы используются;
● прием разовых команд (запрет перестройки, воздух — земля, взлет — посадка), выдаваемых другими бортовыми системами, необходимых для обеспечения выполнения оборудованием MLS требуемых функций;
● выдачу электрических сигналов об основных и вспомогательных данных, передаваемых маяками MLS и индикацию основных данных.
В соответствии с решаемыми задачами, в MLS выделяют независимые, друг от друга, угломерную (УПС) и дальномерную (ДПС) подсистемы.
---
В комплектацию MLS входят:
● азимутальный радиомаяк захода на посадку АРМ-1;
● угломестный радиомаяк захода на посадку УРМ-1;
● дальномерный радиомаяк ответчик ДРМ.
15) Система DME: назначение, основные параметры, принцип функционирования
Дальномерная система навигации (DME) и ее возможности
Система обеспечивает получение на борту воздушного судна следующей информации:
- об удалении (наклонной дальности) воздушного судна от места установки радиомаяка;
- об отличительном признаке радиомаяка.
Система DME работает в диапазоне 960 -1215 МГц с вертикальной поляризацией, имеет 252 частотно – кодовых канала.
В основе работы системы DME лежит известный принцип «запрос – ответ».
Измеритель дальности бортового оборудования создает сигнал запроса, который в виде двухимпульсной кодовой посылки подается на передатчик и излучается бортовой антенной. Высокочастотные кодовые посылки сигнала запроса принимаются антенной наземного радиомаяка поступают на приемник и далее на устройство обработки. В нем производится декодирование принятой посылки, при этом отделяются случайные импульсные помехи от сигналов запросов бортового оборудования, затем сигнал вновь кодируется двухимпульсным кодом, поступает на передатчик и излучается антенной радиомаяка. Ответный сигнал, излученный радиомаяком, принимается бортовой антенной, поступает на приемник и с него на измеритель дальности, где осуществляется декодирование ответного сигнала и выделение из принятых ответных сигналов конкретного ответного сигнала, излученного радиомаяком на посланный запрос. По времени задержки ответного сигнала относительно запросного определяется дальность до радиомаяка. Ответные сигналы радиомаяка относительно запросных задержаны на постоянную величин, равную 50 мкс, которая учитывается при измерений дальности.
Наземный радиомаяк должен одновременно обслуживать большое число летательного аппарата, поэтому его аппаратура рассчитывается на прием, обработку и излучение достаточно большого числа запросных сигналов. При этом для каждого конкретного летательного аппарата ответные сигналы всем остальным летательным аппаратам, работающим с данным радиомаяком, являются помехой.
|
