|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структурный анализ и геометрический синтез рычажного механизмаСтр 1 из 4Следующая ⇒
КУРСОВОЙ ПРОЕКТ
ПО КУРСУ Т.М.М.
Расчётно-пояснительная записка
Рыбинск 2006 г. Структурный анализ и геометрический синтез рычажного механизма
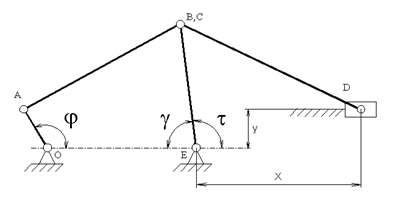
Структурная схема рычажного механизма, показанная на рис. 1
Рисунок 1 – Структурная схема механизма
Размеры коромысла: lBE = 0, 6 м; y = 0, 2 м; Углового размаха коромысла ψ = 550. Входное звено – кривошип. Коэффициент изменения средней скорости выходного звена k = 1, 07. Максимальные углы давления в кинематических парах В и D δ max = 380. Направление действия силы полезного сопротивления FПС - по стрелке. Угловая скорость кривошипа: w1 =12 рад/с. Значение силы полезного сопротивления: Fпс=3000Н. Модуль зубчатого зацепления: m=30 мм. Числа зубьев колёс: Z1=16, Z 2=20. Структурный анализ рычажного механизма
Вычерчиваем структурную схему механизма и указываем на ней номера и наименования звеньев. Звено 5 является выходным, так как к нему приложена сила полезного сопротивления F ПС.
Рисунок 2 – Структурная схема механизма: 1 – кривошип; 2, 4 – шатуны; 3-коромысло; 5 – ползун; 6 – стойка.
Составляем таблицу кинематических пар
Таблица 1 – Таблица кинематических пар
Определяем число степеней подвижности механизма по формуле Чебышева W = 3n – 2 p5 – 2p4 + qПС, (1)
где n = 5 – число подвижных звеньев (см. рис. 2); p5 = 7 – количество пар 5 класса (см. табл. 1); p4 = 0 – количество пар 4 класса (см. табл. 1); qПС = 0 – число пассивных связей. В рассматриваемом механизме нельзя отбросить ни одно из звеньев так, чтобы это не сказалось на законе движения выходного звена. Подставляем значения в формулу (1) и выполняем вычисления.
W = 3 · 5 – 2 ·7 = 1
В механизме одно входное звено. Расчленяем механизм на простейшие структурные составляющие. Формула строения I (1, 6) → II (2, 3) → II (4, 5) Механизм в целом относится ко второму классу.
Определение недостающих размеров звеньев
Размер звеньев будем определять графоаналитическим методом. Для построения планов механизма выберем стандартный масштабный коэффициент длины μ 1 = 0, 01 м / мм. Определяем длины отрезков на планах, соответствующие звену 3.
|ВЕ| =|ЕС| = lBE / μ 1 = 0, 6 / 0, 01 = 60 мм
Вычерчиваем планы звена 3 в крайних положениях, выдерживая между ними угол размаха ψ = 550 (рисунок 4). Крайнее правое положение в дальнейшем будем обозначать верхним индексом К1, а крайнее левое – К2. Из точки В проводим вектор её скорости VB. Ввиду того, что звено 3 совершает вращательное движение вокруг точки Е, он направлен перпендикулярно ВЕ. Вследствие расположения центра вращения кривошипа (точка О) слева от коромысла угол давления δ maxвр принимает наибольшее значение, равное 38°, в положении К1. Проводим под этим углом к вектору V В прямую В k1 N1, по которой направлены звенья 1 и 2 в этом положении. Вычисляем величину угла перекрытия:
Θ =
Из точки В k2 проводим вспомогательную прямую В k 2 Н, параллельную В k 1 N1. Строим угол НВ k 2 N2, равный Θ, и проводим прямую В k 2 N2, пресекающую В k 1 N1. Точка О, в которой пересеклись прямые, и является центром вращения кривошипа. Изображаем соответствующий элемент стойки. Для определения размеров на плане отрезков, соответствующих звеньям 1 и 2, составляем и решаем систему уравнений.
| AB| = |О A| = Наносим на план механизма точки А k 1 и А k2. Вычисляем реальные размеры звеньев
lOE = μ 1 · |OE| = 0, 01 · 125 = 1, 25 м lA B = μ 1 · |A В| = 0, 01 · 125 = 1, 25 м lOA = μ 1 · |OA| = 0, 01 · 27 = 0, 27 м Центр вращения кривошипа смещен относительно направляющей стойки на величину y=0, 2 м. Параллельно направляющей, на высоте y, проводим прямую E*R. Проводим пунктирной линией перпендикуляр ЕВ* к направляющей, равный
ЕВ*=ЕВк1=ЕВк2 или ЕС* =ЕСк1 =ЕСк2.
Из точки С* опускаем штрих пунктирную прямую под углом dmax = 380 к направляющей E*R. Точка пересечения D*. Длину прямой вычисляем графическим способом С*D*=0.65 м. Из точек Ск1 и Ск2 опускаем прямые к прямой E*R равные Ск1Dk1=C*D*=Ck2Dk2=0.65 м. Соответственно точки пересечения Dk1 и Dk2. Получим отрезки ½ Ск1Dk1 ½ и ½ Ск2Dk2 ½, соответствующие шатуну в крайних положениях к1 и к2. Вычерчиваем звено 5 в крайних положениях. Вычисляем длину шатуна 4.
l С D = μ 1 · |CD| = 0, 01 · 65 = 0, 65 м. Подготовка исходных данных для введения в ЭВМ Изображаем расчетную схему для вывода формул, связывающих некоторые геометрические параметры механизма.
Рисунок 5 – расчетная схема Из чертежа видно t=1800 – g + b Так как угол b отсутствует, следует что b = 0, а значит Sinb = 0 и z=y Взяв геометрические размеры из пунктов 1.2, 1.3, 3.13, 3.20 и значение угловой скорости из пункта 1.9, составляем таблицу исходных данных для введения в ЭВМ.
Таблица 2
Описание работы на ЭВМ С шагом 100 выполняем вычисления за полный цикл работы: jнач = 00, jкон = 3600. Анализ результатов (таблица 3) показывает, что крайнее положение механизма имеют место при 200 < j < 300 и 2000 < j < 2100, поскольку на этих промежутках происходит изменение знака скорости ползуна. Принимаем jнач = 200 и jкон = 300 выполняем вычисления с шагом 20 Принимаем jнач = 2000иjкон = 2100 выполняем вычисления с шагом 20 Результаты вычисления показывают, что крайним положениям соответствуют промежутки 220 < j < 240 и 2080 < j < 2100 Принимаем jнач = 220 и jкон = 240 проводим расчеты с шагом 0, 50. Аналогично поступаем для jнач = 2080 и jкон = 2100
7. Построение плана механизма в расчетном положении
Приняв масштабный коэффициент плана μ 1=0, 01 м/мм, вычисляем длины отрезков на плане, соответствующих звеньям механизма.
Изображаем элементы стойки: шарниры О и Е, а так же направляющую Е*D ½ ½ OE. Вычерчиваем кривошип ОА под углом jp=800 к межосевой линии ОЕ. Из точки Е проводим дугу окружности радиуса |ВЕ| = 60 мм (траектория т. В). Из т. А циркулем с раствором |АВ| = 125 мм делаем засечку на траектории т. В и находим эту точку. Проводим прямые |AB | и | BE|. Строим стержень ½ СD½ = 65 мм делаем засечку на направляющий стойки и находим центр шарнира D. Соединяем точки С и D прямой линией, изображаем ползун. Проставляем обозначения кинематических пар, номера звеньев, углы поворота кривошипа jр и коромысла g, а так же направление вращения кривошипа.
КУРСОВОЙ ПРОЕКТ
ПО КУРСУ Т.М.М.
Расчётно-пояснительная записка
Рыбинск 2006 г. Структурный анализ и геометрический синтез рычажного механизма
Структурная схема рычажного механизма, показанная на рис. 1
Рисунок 1 – Структурная схема механизма
Размеры коромысла: lBE = 0, 6 м; y = 0, 2 м; Углового размаха коромысла ψ = 550. Входное звено – кривошип. Коэффициент изменения средней скорости выходного звена k = 1, 07. Максимальные углы давления в кинематических парах В и D δ max = 380. Направление действия силы полезного сопротивления FПС - по стрелке. Угловая скорость кривошипа: w1 =12 рад/с. Значение силы полезного сопротивления: Fпс=3000Н. Модуль зубчатого зацепления: m=30 мм. Числа зубьев колёс: Z1=16, Z 2=20. |
Последнее изменение этой страницы: 2020-02-16; Просмотров: 173; Нарушение авторского права страницы


 =6°5´
=6°5´