
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение направления вращения кривошипа
Строим траектории центров шарниров. Для точек А, В и С это – дуги окружностей радиусов соответственно |ОА|, |ВЕ| и |ЕС|. Кривошип 1 совершает полный оборот и поэтому точка А движется по окружности. Точка D вместе с ползуном 5 перемещается по прямой E*R. Вычисляем углы поворота кривошипа, соответствующие рабочему и холостому ходам, и проставляем их на планах.
α р = 180˚ + Θ = 180˚ + 6˚ 5΄ = 186˚ 5΄ α х = 180˚ – Θ = 180˚ – 6˚ 5΄ = 173˚ 55΄
Во время рабочего хода ползун 5 движется против силы FПС из положения К2 в положение К1. При этом шарнир С перемещается по дуге окружности из положения С k 2 в положение С k 1 Точка А, расположенная на кривошипе 1, должна в течении рабочего хода переместиться из положения А k 2 в положение А k 1, а сам кривошип – повернуться на угол Проставляем найденное направление угловой скорости на планах механизма.
Подготовка исходных данных для введения в ЭВМ Изображаем расчетную схему для вывода формул, связывающих некоторые геометрические параметры механизма.
Рисунок 5 – расчетная схема Из чертежа видно t=1800 – g + b Так как угол b отсутствует, следует что b = 0, а значит Sinb = 0 и z=y Взяв геометрические размеры из пунктов 1.2, 1.3, 3.13, 3.20 и значение угловой скорости из пункта 1.9, составляем таблицу исходных данных для введения в ЭВМ.
Таблица 2
Описание работы на ЭВМ С шагом 100 выполняем вычисления за полный цикл работы: jнач = 00, jкон = 3600. Анализ результатов (таблица 3) показывает, что крайнее положение механизма имеют место при 200 < j < 300 и 2000 < j < 2100, поскольку на этих промежутках происходит изменение знака скорости ползуна. Принимаем jнач = 200 и jкон = 300 выполняем вычисления с шагом 20 Принимаем jнач = 2000иjкон = 2100 выполняем вычисления с шагом 20 Результаты вычисления показывают, что крайним положениям соответствуют промежутки 220 < j < 240 и 2080 < j < 2100 Принимаем jнач = 220 и jкон = 240 проводим расчеты с шагом 0, 50. Аналогично поступаем для jнач = 2080 и jкон = 2100
7. Построение плана механизма в расчетном положении
Приняв масштабный коэффициент плана μ 1=0, 01 м/мм, вычисляем длины отрезков на плане, соответствующих звеньям механизма.
Изображаем элементы стойки: шарниры О и Е, а так же направляющую Е*D ½ ½ OE. Вычерчиваем кривошип ОА под углом jp=800 к межосевой линии ОЕ. Из точки Е проводим дугу окружности радиуса |ВЕ| = 60 мм (траектория т. В). Из т. А циркулем с раствором |АВ| = 125 мм делаем засечку на траектории т. В и находим эту точку. Проводим прямые |AB | и | BE|. Строим стержень ½ СD½ = 65 мм делаем засечку на направляющий стойки и находим центр шарнира D. Соединяем точки С и D прямой линией, изображаем ползун. Проставляем обозначения кинематических пар, номера звеньев, углы поворота кривошипа jр и коромысла g, а так же направление вращения кривошипа.
Определение линейных и угловых скоростей графоаналитическим методом
Вычисляем скорость центра шарнира А.
Рассматривая плоское движение звена 2, составляем векторное уравнение скорости центра шарнира В и анализируем входящие в него величины.
^ BE ^ OA ^AB
Исходя из ориентировочной длины вектора | pa | = 120 мм, находим приближённое значение масштабного коэффициента плана скоростей
mv=
Принимаем стандартные значения m = 0, 025 м/(с·мм). Решаем векторное уравнение графически. Длина вектора, известного полностью. |ра| =
Искомые линейные скорости V В = mv · |pb| = 0, 025 · 122 = 3, 05 м/с V ВА = mv · |ab| = 0, 025 · 23 = 0, 575 м/с 10.6 Так как BE = CE, то |ес| = | be| = 122 мм
Составляем, анализируем и решаем векторное уравнение для скорости т.D. VD = VC + VDC ||OD ^CD
Искомые линейные скорости VC = µV · |pc| = 0, 025 · 122 = 3, 05 м/с VD = mv · |pd| = 0, 025 · 122, 5 = 3, 06 м/с V DC = mv · |dc| = 0, 025 · 0, 5=0, 0125 м/с
Угловые скорости звеньев
Так как скорость V ВА получилась очень маленькой, то на плане скоростей её вектор будем обозначать точкой. Определяем направление угловых скоростей и проставляем их на плане механизма. |
Последнее изменение этой страницы: 2020-02-16; Просмотров: 217; Нарушение авторского права страницы
 .Следовательно, звено 3 в этот промежуток времени поворачивается часовой стрелки, а шарнир В движется по дуге из положения В k 2 в положение В k 1. Очевидно, что все точки механизма в крайнем положении, соответствующем началу рабочего хода, имеет индекс «К2», а концу «К1».
.Следовательно, звено 3 в этот промежуток времени поворачивается часовой стрелки, а шарнир В движется по дуге из положения В k 2 в положение В k 1. Очевидно, что все точки механизма в крайнем положении, соответствующем началу рабочего хода, имеет индекс «К2», а концу «К1». . Это возможно при направлении вращения кривошипа только по часовой стрелки.
. Это возможно при направлении вращения кривошипа только по часовой стрелки.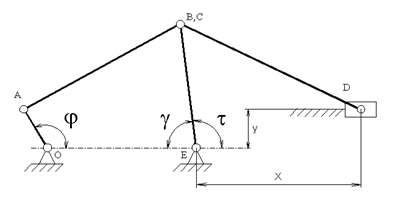


 12 · 0, 27 = 3, 24 м/с
12 · 0, 27 = 3, 24 м/с

