|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамические и статические свойства технических устройств и переход к типовым дифференциальным уравнениям.Стр 1 из 5Следующая ⇒
Математические основы Теории систем
Учебное пособие
Разработал: доцент каф. АИТП Куличенко Т.А.
Рязань 2018
СОДЕРЖАНИЕ 1. Динамические и статические свойства технических устройств и переход к типовым дифференциальным уравнениям.....................................................7 2. Типовые звенья автоматики.............................................................................11 3. Передаточные функции. Преобразование Лапласа и его свойства...........23 4. Эквивалентные передаточные функции типовых соединений..................31 5. Временные характеристики..............................................................................38 6. Частотные характеристики...............................................................................47 7. Логарифмические частотные характеристики типовых звеньев.............56 8. Построение ЛАЧХ типовых сомножителей передаточных функций.......58
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ И ЛИТЕРАТУРЫ........64
Динамические и статические свойства технических устройств и переход к типовым дифференциальным уравнениям. Для того, чтобы изучить свойства сложной физической системы(технического устройства) и научиться управлять ей, необходимо получить ее математическую модель. Для этого требуется установить все взаимосвязи между переменными, характеризующими поведение устройства. Поскольку все реальные объекты по своей природе являются динамическими, то для их описания естественно использовать дифференциальные уравнения. Если, кроме того, эти уравнения могут быть линеаризованы, то тогда можно воспользоваться преобразованием Лапласа. В действительности, сложность устройства и игнорирование ряда привходящих факторов обуславливают возникновение некоторых допущений, связанных с функционированием данного устройства. Поэтому часто бывает полезно игнорировать эти допущения и произвести линеаризацию объекта. В результате, на основании физических законов, описывающих поведение эквивалентной линейной системы, можно получить систему дифференциальных уравнений. Наконец, используя математический аппарат, такой, как преобразование Лапласа, мы сможем получить решение, характеризующее поведение данного устройства. В итоге алгоритм исследование динамики объекта сводится к следующему: 1. Определить техническое устройство и его компоненты. 2. Составить математическую модель и выдвинуть необходимые допущения. 3. Записать дифференциальные уравнения, описывающие поведение модели. 4. Решить уравнения относительно желаемых выходных переменных. 5. Проанализировать решения и допущения. 6. При необходимости провести повторный анализ или синтез модели. Дифференциальные уравнения, описывающие динамику физического объекта, получаются на основании фундаментальных физических законов. Этот метод в равной степени применим к механическим, электрическим, гидравлическим и термодинамическим системам. Рассмотрим апериодическое звено первого порядка(или, другими словами, инерционное звено). Звено описывается дифференциальным уравнением:
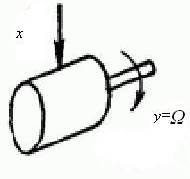
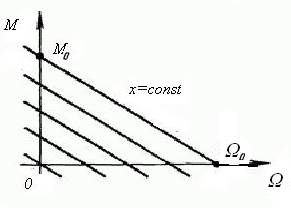
В качестве первого примера (рис. 1) рассмотрим двигатель любого типа (электрический, гидравлический, пневматический и т.д.), механические характеристики которого (зависимость вращающего момента от скорости) могут быть представлены в виде параллельных прямых (рис.2).
Рис. 1. Схематичное изображение двигателя Рис. 2. Механические характеристики двигателя Входной величиной x здесь является управляющее воздействие в двигателе, например подводимое напряжение в электрическом двигателе, расход жидкости в гидравлическом двигателе и т. п. Выходной величиной является частота вращения Ω . Дифференциальное уравнение движения при равенстве нулю нагрузки может быть представлено в виде:
где J - приведенный к валу двигателя суммарный момент инерции; kM – коэффициент пропорциональности между управляющим воздействием x и вращающим моментом; k 1 = M 0 /Ω 0 – наклон механической характеристики, равный отношению пускового момента к скорости холостого хода при некотором значении управляющего воздействия. Это уравнение приводится к виду:
где k = kM / k 1 – коэффициент передачи звена, В качестве второго примера (рис.3) приведем электрическую L-R цепь, которая также представляет из себя инерционное звено (апериодическое звено первого порядка). Рис. 3. Пассивная L - R цепь Аналогично с первым примером, покажем приведение дифференциально-го уравнения для LR-цепи, имея в виду входное и выходное воздействие U вх = x, U вых = y
Из уравнения (4) можем выразить ток i:
Подставив (5) в (3), получим:
Зная, что
Видим, что с учетом коэффициента k и помня, что U вх = x, U вых = y, уравнение (6) так же полностью совпадает с уравнением (1), что доказывает, что вне зависимости от физической природы устройства, мы приходим к одному и тому же дифференциальному уравнению, где T – постоянная времени, измеряемая в секундах, а k – статический коэффициент передачи, который может быть как безразмерным (как во втором примере) и размерным (первый пример). Следовательно, можно говорить о типовых звеньях и типовых уравнениях, которые описывают поведение целого ряда устройств. Принято при записи типовых уравнений слева записывать выходную величину (y ( t )) со всеми ее преобразованиями, а справа, относительно знака равенства, входную величину x ( t ) также со всеми ее преобразованиями. В зависимости от этого, можно выделить алгебраические уравнения, дифференциальные уравнения первого порядка и дифференциальные уравнения второго порядка. Такой набор уравнений с достаточной степенью точности описывает основные технические устройства. Далее рассмотрим уравнения типовых звеньев и отметим, какие технические устройства имеют такие модели. Типовые звенья автоматики. Безынерционное звено. Это звено не только в статике, но и в динамике описывается алгебраи-ческим уравнением:
Примером такого звена являются механический редуктор (без учета явления скручивания и люфта), безынерционный (широкополосный) усилитель, делитель напряжения и т. п. Многие датчики сигналов, как например, потенциометрические датчики, индукционные датчики, вращающиеся транс-форматоры и т. п., также могут рассматриваться как безынерционные звенья. Рис. 4. Примеры апериодических звеньев первого порядка Колебательное звено. Звено описывается тем же дифференциальным уравнение, что и апериодиче-ское звено второго порядка. Однако корни характеристического уравнения Левая часть дифференциального уравнения обычно представляется в виде:
Имея ввиду, что входное напряжение u 1 = x, а выходное напряжение u 2 = y, из уравнения (9) получаем
Решая, получаем:
Примеры колебательных звеньев приведены на рис.6. К ним относятся колебательные RLC-цепи (рис.6, а), упругие механические передачи, например для передачи вращательного движения (рис.6, б), с упругостью С, моментом инерции J и коэффициентом скоростного трения S, гироскопические элементы (рис.6, в) и др.
Рис. 6. Примеры колебательных звеньев Консервативное звено. Консервативное звено является частным случаем колебательного при Ϛ = = 0. Тогда дифференциальное уравнение будет иметь вид:
Консервативное звено представляет собой идеализированный случай, когда можно пренебречь влиянием рассеяния энергии в звене. Для изображенных на рисунке 6 примеров мы получим консервативные звенья, если в случае а) положить R =0, в случае б) положить S =0 и в случае г) положить F =0. Все эти звенья являются статическими и имеют инерционный эффект. Интегрирующие звенья Рис. 7. Примеры интегрирующих звеньев Изодромное звено. Звено описывается уравнением:
где T=k1/k – постоянная времени изодромного звена. Примеры изодромных звеньев изображены на рис.8. Таким звеном может быть комбинация пружины с демпфером (рис.8, б). В качестве входной величины здесь рассматривается прикладываемая сила F, а в качестве выходной – перемещение x точки a, в которой приложена сила. Это перемещение складывается из деформации пружины
где c – жесткость пружины и перемещения поршня
где S – коэффициент скоростного сопротивления демпфера. Результирующее перемещение точки
Рис. 8. Примеры изодромных звеньев При использовании операционного усилителя (рис.8, а) изодромное звено может быть получено посредством применения RC-цепи в обратной связи. В системах управления часто находят применение изодромные звенья, построенные на базе интегрирующего привода (рис.8, в). В этом случае входное напряжение u 1 поступает непосредственно на выход. Кроме того, это же напряжение поступает на вход интегрирующего привода. Угол поворота валика последнего, в соответствии с изложенным выше, пропорционален интегралу от входного напряжения u 1. На выходном валике устанавливается какой-либо датчик (Д) представляющий собой линейный преобразователь угла поворота в напряжение, например потенциометр или линейный вращающийся трансформатор. Напряжение этого преобразователя u 3 суммируется с напряжением u 1. Эта сумма и представляет собой входное напряжение u 2.
Дифференцирующие звенья. Рис. 9. Примеры идеальных дифференцирующих звеньев Рис. 10. Примеры дифференцирующих звеньев с замедлением Составим, например, уравнение для дифференцирующего конденсатора (рис. 10, а). Ток в рассматриваемой цепи определяется уравнением:
откуда
Отсюда, решая эти уравнения относительно тока i, получим
Зная, что RC = T, получаем уравнение
Форсирующее звено. Звено описывается уравнением:
Такое звено не существует в природе, его получают искусственно. Рис. 11. Пассивные RC -цепочки В первой схеме преобладает форсирующий эффект (т.к. T1> T2), а во второй – инерционный (т.к. T2> T1). 3. Передаточные функции. Преобразование Лапласа и его свойства. Одной из основных форм математической модели динамических звеньев является передаточная функция устройства, которая получается путём интегрального преобразования Лапласа дифференциального уравнения. Суще-ствует прямое преобразование Лапласа:
где f ( t ) – оригинал, F ( p ) – изображение. Также существует обратное преобразование Лапласа:
Эти уравнения часто записывают в сокращенном виде:
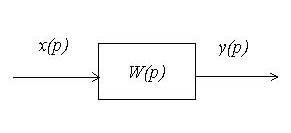
Передаточная функция устройства определена как изображение выходной величины y ( p ) к изображению входной величины x ( p ) при нулевых начальных условиях. Обозначается:
В таблице 1 приведены основные свойства и теоремы преобразования Лапласа, которые используются при переходе к операторной форме дифферен-циального уравнения и определении передаточной функции.
Таблица 1. Преобразования Лапласа
Таблица 1. (Окончание)
В частности, в этом случае используется свойство линейности и правило дифференцирования при нулевых начальных условиях.
Рассмотрим примеры получения передаточных функций типовых звеньев. Безынерционное звено.
Перейдем к операторной форме:
Т.к. звено безынерционное (отсутствуют производные), для перехода к операторной форме использовалось только свойство линейности. По определению передаточной функции:
Достоинством применения передаточных функций является возможность уйти от решения дифференциальных уравнений. Инерционное звено.
При переходе к операторной форме необходимо использовать как свойство линейности, так и правило дифференцирования:
Преобразуя выражение, получим:
По определению передаточной функции из полученной выше пропорции получаем:
Следовательно, если известна передаточная функция и сигнал на входе устройства, всегда можно найти значение выходного сигнала:
Эта возможность говорит о том, что передаточная функция является динамическим коэффициентом передачи и такую модель можно изобразить структурно (рис.12):
Рис. 12. Структурное изображение модели передаточной функции Идеальный интегратор.
Операторная форма записи:
Форсирующее звено.
Операторная форма записи:
Интегратор с замедлением.
Операторная форма записи:
Аналогичным образом могут быть получены передаточные функции всех типовых звеньев. Рассмотрим их ниже. Консервативное звено.
Передаточная функция:
Изодромное звено.
Передаточная функция:
Идеальный дифференциатор.
Передаточная функция:
Колебательное звено.
Передаточная функция:
Рис. 13. Типовые соединения динамических звеньев Используя основные соединения типовых элементарных звеньев: интегрирующего, дифференцирующего и безынерционного, можно получить любое сложное типовое звено. 1. Рассмотрим применения последовательного соединения: а) Пусть необходимо получить передаточную функцию типового звена б) Аналогичным образом, инерционное звено 2 порядка
2. Рассмотрим применения параллельного соединения: а) Пусть
Следовательно, получено изодромное звено. б) Пусть
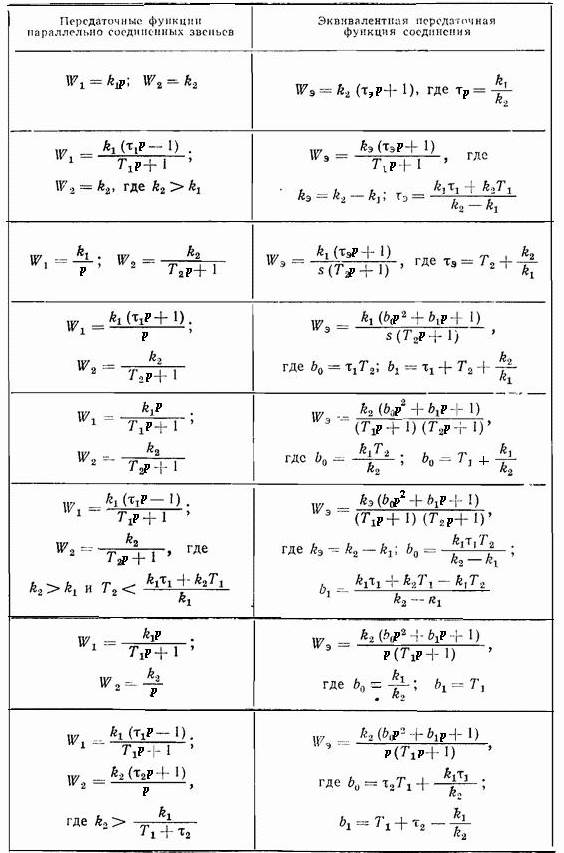
где Из примеров следует, что параллельное соединение сохраняет динамические свойства подключаемого звена с добавлением инерционных. Соединения с другими звеньями приведены в табл.2.
Таблица 2. Параллельные соединения типовых динамических звеньев Таблица 2. (Окончание) 3. Рассмотрим свойства соединений с встречно-параллельной (местной обратной) связью. На примерах отметим свойства 2 характерных случаев: а) в прямой цепи – безынерционное звено, а в обратной – динамическое; б) в прямой цепи – динамическое звено, а в обратной – безынерционное. Для 1 случая: 1) Пусть
Получили инерционное звено. 2) Пусть
Получили инерционно-форсирующее звено с преобладанием форсирующего эффекта. Как видно из примеров, в эквивалентной передаточной функции инвертируются динамические свойства звена обратной связи. Для 2 случая: 1) Пусть
Получили инерционное звено 1 порядка. То есть, эквивалентное соединение сохраняет динамические свойства прошлой цепи. 2) Пусть
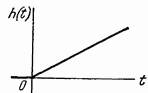
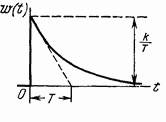
Получили инерционное звено 1 порядка. Заметим, что с помощью этого соединения можно получить инерционное звено и общее свойство такого соединения сохраняется. Временные характеристики. Динамические свойства звена могут быть определены по его переходной функции и функции веса. Переходная функция, или переходная характеристика, h ( t ) описывает переходный процесс на выходе звена, возникающий при подаче на его вход скачкообразного воздействия при величине скачка, равной единице (рис.14).
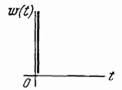
Рис. 14. Переходная характеристика Такое входное воздействие называется единичной ступенчатой функцией и обозначается Если входное воздействие представляет собой неединичную ступенчатую функцию Умножение какой-либо функции времени x ( t ) на единичную ступенчатую функцию 1( t ) означает, что функция времени x ( t ) будет существовать только при Рис. 15. Область существования функции времени Функция веса
Рис. 16. Функция веса и единичная импульсная функция Единичная импульсная функция или дельта-функция представляет собой производную от единичной ступенчатой функции: Дельта-функция тождественно равна нулю повсюду, кроме точки
т. е. она имеет единичную площадь. Из последнего выражения следует, что размерность дельта-функции равна Нетрудно установить связь между переходной функцией и функций веса. Рассмотрим входное воздействие звена в виде конечного по высоте и ширине импульса с площадью
Рис. 17. Входное воздействие звена в виде импульса Такой импульс может быть заменен двумя ступенчатыми функциями
Будем теперь увеличивать высоту импульса N, одновременно уменьшая его ширину ε, но так, чтобы все время площадь импульса равнялась единице, т. е.
Таким образом, функция веса может быть получена дифференцированием по времени переходной функции. Переходная функция и функция веса связаны с передаточной функцией звена соотношениями:
Следовательно:
Переходные характеристики можно получить экспериментально или в аналитическом виде, используя различные методы, включающие как непосредственное решение дифференциального уравнения с нулевыми начальными условиями, использование обратного преобразования Лапласа и теорем, так и получая переходные характеристики основных простых звеньев и представляя более сложные как сумму элементарных переходных характеристик. Покажем на примерах. 1) Безынерционное звено
2) Идеальный интегратор 3) Идеальный дифференциатор Следовательно, 4) Инерционное звено
Общий вид решения:
При нулевых начальных условиях
Следовательно 0 = k + c и c = - k. Окончательно получим:
Дифференцируя это выражение, получим весовую функцию:
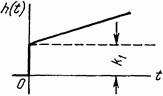
Все переходные характеристики остальных звеньев легко получить, если разложить их на сумму элементарных звеньев с учетом инерционного. Суммарная
Следовательно, переходная характеристик есть сумма характеристик безынерционного звена с коэффициентом передачи k 1 и интегрирующего с коэффициентом передачи k. По аналогии, форсирующее звено k ( Tp +1) есть сумма элементарных звеньев kTp и k, т. е. представляет собой сумму переходных характеристик идеального дифференциатора и безынерционного звена. При разложении на простые звенья более сложных, например интегратора с замедлением для представления его в виде суммы идеального интегратора и инерционного звена, необходимо воспользоваться правилом разложения на дроби с неопределенными коэффициентами. Передаточные функции, переходные и весовые характеристики типовых звеньев приведены в таблице 3.
Таблица 3. Временные характеристики звеньев автоматики Таблица 3. (Продолжение)
Таблица 3. (Окончание)
Частотные характеристики. |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 192; Нарушение авторского права страницы
 (1)
(1) 


 – постоянная времени двигателя. Оно полностью совпадает с (1).
– постоянная времени двигателя. Оно полностью совпадает с (1).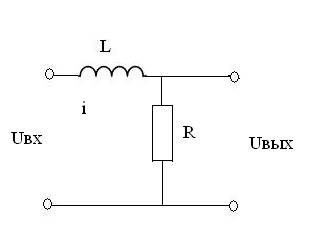



 и сократив R/R, получим
и сократив R/R, получим

 должны быть комплексными, что будет выполняться при
должны быть комплексными, что будет выполняться при 
















































































 Это звено состоит из 3 типовых, последовательно соединенных: безынерционного (k), форсирующего (Tp +1) и интегрирующего (1/ p).
Это звено состоит из 3 типовых, последовательно соединенных: безынерционного (k), форсирующего (Tp +1) и интегрирующего (1/ p). – 2 последовательно включенных инерционных звена
– 2 последовательно включенных инерционных звена  и
и 
 где
где 
 .
. 
 . Тогда:
. Тогда: 
 Получили инерционно-форсирующее звено с преобладанием инерционного эффекта.
Получили инерционно-форсирующее звено с преобладанием инерционного эффекта.










 , что соотсветствует
, что соотсветствует  Предполагается, что единица имеет ту же размерность, что и физическая величина на входе звена.
Предполагается, что единица имеет ту же размерность, что и физическая величина на входе звена. выходная величина будет равна
выходная величина будет равна  .
. , при
, при  она обращается в нуль. Это показано на рис. 15.
она обращается в нуль. Это показано на рис. 15.
 представляет собой реакцию звена на единичную импульсную функцию, поданную на вход (рис. 16).
представляет собой реакцию звена на единичную импульсную функцию, поданную на вход (рис. 16).
 где она стремится к бесконечности. Основное свойство дельта-функции заключается в том, что:
где она стремится к бесконечности. Основное свойство дельта-функции заключается в том, что: 

 , прикладываемого при
, прикладываемого при  (рис.17).
(рис.17).
 прикладываемыми ко входу звена со сдвигом во времени ε. Тогда выходная величина будет равна:
прикладываемыми ко входу звена со сдвигом во времени ε. Тогда выходная величина будет равна: 
 Помножив и поделив правую часть равенства (11) на ε и перейдя к пределу, получим функцию веса:
Помножив и поделив правую часть равенства (11) на ε и перейдя к пределу, получим функцию веса: 



 , где
, где  . Очевидно, что
. Очевидно, что 
 .
. , где
, где 
 где
где  , а
, а 
 .
.





 равняется алгебраической сумме переходных характеристик. Например, для изодромного звена, соединяя параллельно идеальный интегратор
равняется алгебраической сумме переходных характеристик. Например, для изодромного звена, соединяя параллельно идеальный интегратор  и безынерционное звено
и безынерционное звено  по правилу эквивалентных передаточных функций параллельных соединений, получим:
по правилу эквивалентных передаточных функций параллельных соединений, получим:  , где
, где  .
.








 =
=  (
( 

 (1−
(1−  +
+
+
+ 

 )
) 







 =
=  ;
;