|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Построение ЛАЧХ типовых сомножителей передаточных функций. ⇐ ПредыдущаяСтр 5 из 5
Анализ передаточных функций типовых звеньев показывает, что их можно представить в общем виде 1) Типовой сомножитель а) Если ν = 0, то этот сомножитель представляет собой безынерционное звено, для которого АЧХ: A (ω )= k, ФЧХ: φ (ω )=0. Следовательно, L ( ω )=20 lg k представляет собой прямую, идущую от ω =0, параллельную оси частот. б) Если ν = 1, АЧХ: ЛАЧХ: Получили уравнение прямой. Как известно, чтобы провести прямую на плоскости, необходимо иметь либо 2 точки, либо 1 точку и угол наклона. Проведем исследование зависимости L ( ω ) в пределах одной декады от ω =1 до ω =10. Пусть ω = 1. Тогда Пусть ω = 10. Тогда
На рис. 20 построены ЛЧХ сомножителя
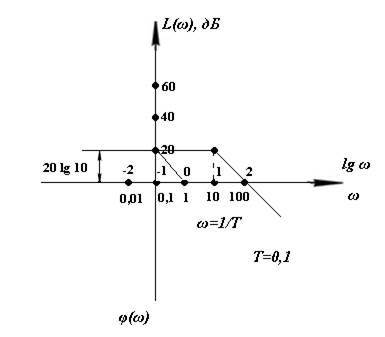
Рис. 20. ЛЧХ сомножителя 2) Типовой сомножитель ( Tp +1). Для него АЧХ: Пусть Пусть Анализируя полученный результат, можно сделать вывод о том, что сложение ЛАЧХ, например, от безынерционного звена и инерционной скобки выливается в алгебраическое сложение наклонов на сопрягающей частоте. На рис. 21 приведены ЛЧХ инерционного звена с k = 10 и T = 0, 1 c, т. е.
Рис. 21. ЛЧХ инерционного звена Для него 20 lg k = 20 дБ, АЧХ, ФЧХ и ЛАЧХ приведены в таблице 4.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ И ЛИТЕРАТУРЫ Научная и учебная литература
1. Магазинников Л.И. Высшая математика ІІІ. Функция комплексного переменного. Ряды. Интегральные преобразования. – Томск: Томск. гос. ун-т систем управления и радиоэлектроники, 1999. – 205 с. 2. Математические основы теории автоматического регулирования. В 2-х тт. / Под ред. Б.К. Чемоданова. – М.: Высшая школа, 1977. 3. Деч Г. Руководство к практическому применению преобразований Лапласа и Z-преобразования. – М.: ГИФМЛ, 1971. – 288 с. 4. Теория автоматического управления / Под ред. А.В. Нетушила. – М.: Высшая школа, 1976. – 400 с. 5. Макаров И.М., Менский Б.М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). – М.: Машиностроение, 1982. – 504 с. 6. Мирошник И.В. Теория автоматического управления. Линейные системы. – СПб.: Питер, 2005. – 336 с. 7. Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления: Учебное пособие. 3-е изд., доп. и перераб. – СПб.: Лань, 2010. – 224 с. 8. Бесекерский В. А., Попов Е.П. Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов – Изд. 4-е, перераб. и доп. – СПб.: Профессия, 2004. – 752 с. 9. Айзерман М.А. Теория автоматического регулирования. – М.: Наука, 1966. 10. Р. Дорф, Р. Бишоп. Современные системы управления. – М.: ЮНИМЕДИАСТАЙЛ, 2002. – 831 с. 11. Власов Н.П. Теория линейных систем, работающих на переменном токе. – М.: Энергия, 1964. 12. Бесекерский В.А. Динамический синтез систем автоматического регули-рования. – М.: Наука, 1970. Электронные ресурсы 13. Теория автоматического управления. Методические указания к выполнению расчетно-графической работы по дисциплине «Теория автоматического управления» для студентов направления 15.03.05 «Конструкторско-технологическое обеспечение машиностроительных производств» http: //www.iprbookshop.ru/73607.html 14. Теория автоматического управления. Современные разделы теории управления. Учебное пособие. http: //www.iprbookshop.ru/61292.html 15. Теория автоматического управления. Часть I. Непрерывные системы. Учебное пособие. http: //www.iprbookshop.ru/28400.html 16. Основы теории автоматического управления. Учебное пособие. http: //www.iprbookshop.ru/37832.html 17. Теория автоматического управления. Учебное методическое пособие. http: //www.iprbookshop.ru/13869.html |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 233; Нарушение авторского права страницы
 где k – статический коэффициент передачи (безынерционное звено); если ν = 0, то звено статического типа, если ν = 1, то звенья астатического типа. В
где k – статический коэффициент передачи (безынерционное звено); если ν = 0, то звено статического типа, если ν = 1, то звенья астатического типа. В  входят звенья статического типа, представляемые типовой скобкой ( Tp +1), стоящей либо в числителе, либо в знаменателе. Следовательно, необходимо научиться строить ЛАЧХ сомножителя
входят звенья статического типа, представляемые типовой скобкой ( Tp +1), стоящей либо в числителе, либо в знаменателе. Следовательно, необходимо научиться строить ЛАЧХ сомножителя  и типовой скобки ( Tp +1). Рассмотрим подходы к построению.
и типовой скобки ( Tp +1). Рассмотрим подходы к построению.
 , ФЧХ:
, ФЧХ: 
 .
. Следовательно, на частоте ω =1 мы получили значение ординаты характеристики, т. е. точку, через которую пройдет прямая.
Следовательно, на частоте ω =1 мы получили значение ординаты характеристики, т. е. точку, через которую пройдет прямая. Следовательно, за одну декаду значение L (ω ) уменьшилось на 20 дБ и можно ввести понятие угла наклона характеристики -20 дБ/дек. Для определения такого наклона всегда можно построить шаблон. Однако можно найти и вторую точку, а именно, частоту, на которой ЛАЧХ пресекает ось частот. В этом случае L(ω )=0. Следовательно
Следовательно, за одну декаду значение L (ω ) уменьшилось на 20 дБ и можно ввести понятие угла наклона характеристики -20 дБ/дек. Для определения такого наклона всегда можно построить шаблон. Однако можно найти и вторую точку, а именно, частоту, на которой ЛАЧХ пресекает ось частот. В этом случае L(ω )=0. Следовательно


 для значения k = 100.
для значения k = 100.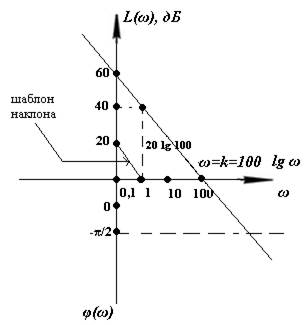

 , ФЧХ:
, ФЧХ:  ЛАЧХ:
ЛАЧХ:  . Из выражения следует, что ЛАЧХ имеет нелинейный характер и построение этой характеристики в логарифмическом масштабе неудобно. На практике пользуются асимптотическими ЛАЧХ, заменяя нелинейную зависимость двумя полупрямыми. Рассмотрим возможность такой замены.
. Из выражения следует, что ЛАЧХ имеет нелинейный характер и построение этой характеристики в логарифмическом масштабе неудобно. На практике пользуются асимптотическими ЛАЧХ, заменяя нелинейную зависимость двумя полупрямыми. Рассмотрим возможность такой замены. . В этом случае слагаемым
. В этом случае слагаемым  под радикалом можно пренебречь и
под радикалом можно пренебречь и  т.е. до частоты
т.е. до частоты  , которая называется сопрягающей, ЛАЧХ представляет собой полупрямую, начинающуюся из 0 частот и проходящую по самой оси частот.
, которая называется сопрягающей, ЛАЧХ представляет собой полупрямую, начинающуюся из 0 частот и проходящую по самой оси частот. . Тогда единицей под радикалом можно пренебречь и
. Тогда единицей под радикалом можно пренебречь и  . Полученное выражение представляет собой полупрямую, которая начинается на оси частот из сопрягающей частоты
. Полученное выражение представляет собой полупрямую, которая начинается на оси частот из сопрягающей частоты