
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
СИЛОВОЙ РАСЧЕТ ГРУППЫ АССУРА ВТОРОГО КЛАССА С ДВУМЯ ВРАЩАТЕЛЬНЫМИ И ОДНОЙ ПОСТУПАТЕЛЬНОЙ КИНЕМАТИЧЕСКИМИ ПАРАМИСтр 1 из 2Следующая ⇒
СИЛОВОЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
Методические указания к выполнению практической и курсовой работы
СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ В курсовом проекте после проведения структурного и кинематического анализа плоского рычажно-шарнирного механизма требуется провести силовой анализ этого механизма, который предполагает решение первой задачи динамики - по заданному закону движения определить действующие силы. Так как законы движения начальных звеньев и внешние силы, действующие на звенья механизмов, заданы, то силовой расчет сводится в основном к определению сил в кинематических парах. Результаты силового анализа необходимы для дальнейших расчетов деталей на прочность, жесткость, износостойкость, надежность, для выбора типов и размеров подшипников, определения коэффициента полезного действия механизма. Силовой расчет можно проводить с учетом и без учета сил трения в кинематических парах. В курсовом проекте силовой расчет проводится без учета сил трения. Обычно при расчетах деталей механизмов на прочность необходимо знать изменение величины сил в кинематических парах за цикл. При выполнении курсового проекта можно ограничиться расчетом сил для одного или двух положений механизма, в которых действуют максимальные внешние нагрузки. К внешним нагрузкам относятся: силы тяжести звеньев Gi, движущая сила Fi момент сопротивления Miс. Силовой расчет, учитывающий ускоренное движение масс, можно производить методом, основанным на законе Ньютона, или же с применением принципа Даламбера. При решении задачи последним методом к каждому звену, помимо внешних сил и моментов, прикладываются главный вектор сил инерции Главный вектор сил инерции звена
где mi - масса i -го звена;
Jsi - момент инерции i - го звена относительно главной центральной оси, проходящей через центр масс Si. Главный вектор сил инерции Числовые значения масс и моментов инерции звеньев механизма приведены в задании на курсовое проектирование. Для определения векторов сил инерции и главных моментов сил инерции для всех звеньев механизма необходимо определить угловые ускорения звеньев и линейные ускорения центров масс. Эти величины находятся при кинематическом анализе механизма с использованием графического, аналитического или численного методов исследования. Силы взаимодействия звеньев рекомендуется обозначать буквой Fij с двойным индексом. Первая цифра индекса показывает звено, к которому приложена сила, вторая цифра звено, со стороны которого действует сила, например F12 - сила, с которой звено 2 действует на звено 1. Для проведения силового расчета нужно расчленить заданный плоский рычажный механизм на группу начального звена (начальное звено со стойкой) и структурные группы с нулевой степенью свободы, так называемые группы Ассура статически определимые группы, для которых число неизвестных сил равно числу уравнений. Кинетостатический расчет механизма начинаем с группы Ассура, наиболее удаленной от начального звена, и проводим его в такой последовательности, как и разделение на группы Ассура при структурном анализе механизма. Рассмотрим наиболее часто встречающиеся группы, из которых состоят рычажные механизмы, исследуемые при курсовом проектировании.
СИЛОВОЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
Методические указания к выполнению практической и курсовой работы
СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ В курсовом проекте после проведения структурного и кинематического анализа плоского рычажно-шарнирного механизма требуется провести силовой анализ этого механизма, который предполагает решение первой задачи динамики - по заданному закону движения определить действующие силы. Так как законы движения начальных звеньев и внешние силы, действующие на звенья механизмов, заданы, то силовой расчет сводится в основном к определению сил в кинематических парах. Результаты силового анализа необходимы для дальнейших расчетов деталей на прочность, жесткость, износостойкость, надежность, для выбора типов и размеров подшипников, определения коэффициента полезного действия механизма. Силовой расчет можно проводить с учетом и без учета сил трения в кинематических парах. В курсовом проекте силовой расчет проводится без учета сил трения. Обычно при расчетах деталей механизмов на прочность необходимо знать изменение величины сил в кинематических парах за цикл. При выполнении курсового проекта можно ограничиться расчетом сил для одного или двух положений механизма, в которых действуют максимальные внешние нагрузки. К внешним нагрузкам относятся: силы тяжести звеньев Gi, движущая сила Fi момент сопротивления Miс. Силовой расчет, учитывающий ускоренное движение масс, можно производить методом, основанным на законе Ньютона, или же с применением принципа Даламбера. При решении задачи последним методом к каждому звену, помимо внешних сил и моментов, прикладываются главный вектор сил инерции Главный вектор сил инерции звена
где mi - масса i -го звена;
Jsi - момент инерции i - го звена относительно главной центральной оси, проходящей через центр масс Si. Главный вектор сил инерции Числовые значения масс и моментов инерции звеньев механизма приведены в задании на курсовое проектирование. Для определения векторов сил инерции и главных моментов сил инерции для всех звеньев механизма необходимо определить угловые ускорения звеньев и линейные ускорения центров масс. Эти величины находятся при кинематическом анализе механизма с использованием графического, аналитического или численного методов исследования. Силы взаимодействия звеньев рекомендуется обозначать буквой Fij с двойным индексом. Первая цифра индекса показывает звено, к которому приложена сила, вторая цифра звено, со стороны которого действует сила, например F12 - сила, с которой звено 2 действует на звено 1. Для проведения силового расчета нужно расчленить заданный плоский рычажный механизм на группу начального звена (начальное звено со стойкой) и структурные группы с нулевой степенью свободы, так называемые группы Ассура статически определимые группы, для которых число неизвестных сил равно числу уравнений. Кинетостатический расчет механизма начинаем с группы Ассура, наиболее удаленной от начального звена, и проводим его в такой последовательности, как и разделение на группы Ассура при структурном анализе механизма. Рассмотрим наиболее часто встречающиеся группы, из которых состоят рычажные механизмы, исследуемые при курсовом проектировании.
СИЛОВОЙ РАСЧЕТ ГРУППЫ АССУРА ВТОРОГО КЛАССА С ДВУМЯ ВРАЩАТЕЛЬНЫМИ И ОДНОЙ ПОСТУПАТЕЛЬНОЙ КИНЕМАТИЧЕСКИМИ ПАРАМИ
Такая группа принадлежит кривошнпно-шатунному механизму и состоит из шатуна 2, соединенного с ползуном 3 (рис. 1).
Рис. 1. Схема сил группы Ассура 2-3 (ВВП), μ l =..., м/мм
Расчет начинаем с определения сил тяжести звеньев G2 и G3, которые приложены в их центрах тяжести S2 и S3, направлены вертикально вниз и определяются как произведение массы звена т, на ускорение свободного падения g = 9, 81: Gi = mi ∙ g. Так как группа освобождена от связей, то вместо них прикладываем соответствующие реакции: реакцию Реакция Реакция Сила производственного сопротивления Для того, чтобы рассматривать группу как находящуюся в равновесии, прикладываем в точках S2 и S3 главные векторы сил инерции
Знак минус в этих формулах показывает, что главные векторы сил инерции направлены противоположно векторам ускорений центров тяжести звеньев. Величины и направления ускорений центров тяжести звеньев К звену 2 прикладываем еще главный момент сил инерции:
Величину углового ускорения определяем следующим образом:
Величину и направление Численное значение момента инерции JS2 дано в задании или может быть определено по формуле:
Переходим к определению реакций 1. Рассматриваем равновесие звена 2 и определяем силу
или тогда
В этом уравнении и далее плечи сил обозначены через h с индексами этих сил. Все плечи определяются непосредственным измерением на чертеже с учетом масштабною коэффициента μ l. Если сила 2. Рассматриваем равновесие всей группы в целом и определяем реакции Так как группа находится в равновесии, то геометрическая сумма всех сил, действующих на ее звенья, равна нулю:
Двумя линиями подчеркнуты силы, известные по величие и по направлению, одной линией - силы, у которых известны только направления. В соответствии с этим уравнением строим многоугольник сил (план сил). Многоугольник должен быть замкнутым. Для этого выбираем произвольно масштабный коэффициент сил [ μ F ]=Н/мм и вычисляем длины векторов, которые будут изображать известные силы. Чтобы получить длину вектора силы, нужно величину силы разделить на масштабный коэффициент. Затем, начиная от точки 0 (рис.2), откладываем последовательно векторы известных сил. В конце каждого вектора делаем стрелку и ставим обозначение силы.
Рис. 2. План сил группы Ассура 2-3 (ВВП), μ F =..., Н/мм
Построение известных сил заканчиваем вектором Определяем их истинные величины.
Определив 3. Рассматриваем равновесие звена 3 и определяем реакцию
Векторная сумма На этом заканчивается силовое исследование данной структурной группы
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1710; Нарушение авторского права страницы
 и главный момент сил инерции
и главный момент сил инерции  . В результате вся система сил и моментов условно рассматривается в равновесии, а значит, задачу динамики можно решать методами статики.
. В результате вся система сил и моментов условно рассматривается в равновесии, а значит, задачу динамики можно решать методами статики. и главный момент сил инерции
и главный момент сил инерции 
 - ускорение центра масс i - го звена,
- ускорение центра масс i - го звена,  - угловое ускорение i - го звена;
- угловое ускорение i - го звена; 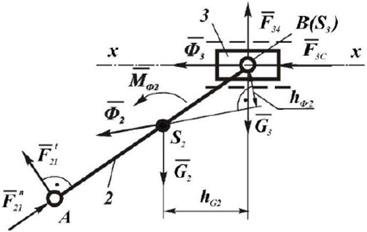
 , действующую в поступательной паре со стороны неподвижного звена 4 на звено 3, и реакцию
, действующую в поступательной паре со стороны неподвижного звена 4 на звено 3, и реакцию  , действующую в шарнире А со стороны звена 1 на звено 2.
, действующую в шарнире А со стороны звена 1 на звено 2. не известна по величине, но известна по направлению она перпендикулярна направляющей 4.
не известна по величине, но известна по направлению она перпендикулярна направляющей 4. , направленную перпендикулярно звену АB, и нормальную
, направленную перпендикулярно звену АB, и нормальную  , направленную вдоль звена АB.
, направленную вдоль звена АB.  действует на ползун 3, проходит через его центр тяжести S3 совпадающий с точкой B, направлена против движения ползуна (направление движения определяется по направлению скорости точки B, из плана скоростей для данного положения механизма). Величина силы либо задана, либо определяется по индикаторной диаграмме.
действует на ползун 3, проходит через его центр тяжести S3 совпадающий с точкой B, направлена против движения ползуна (направление движения определяется по направлению скорости точки B, из плана скоростей для данного положения механизма). Величина силы либо задана, либо определяется по индикаторной диаграмме. и
и  . Величины этих сил определяем по формулам:
. Величины этих сил определяем по формулам:  ;
;  .
.  и
и  определяем по плану ускорений для данного положения механизма.
определяем по плану ускорений для данного положения механизма. .
.  .
. определяем по плану ускорений. Направление ε 2 совпадает с направлением
определяем по плану ускорений. Направление ε 2 совпадает с направлением  .
. действующей в шарнире В со стороны звена 2 па звено 3. Расчет производим в следующем порядке.
действующей в шарнире В со стороны звена 2 па звено 3. Расчет производим в следующем порядке.
 ,
,  .
. получится со знаком минус, то это значит, что она направлена противоположно тому направлению, которое мы первоначально показали на чертеже и использовали при составлении уравнения. В дальнейших расчетах мы должны будем принимать ее действительное направление.
получится со знаком минус, то это значит, что она направлена противоположно тому направлению, которое мы первоначально показали на чертеже и использовали при составлении уравнения. В дальнейших расчетах мы должны будем принимать ее действительное направление. .
.
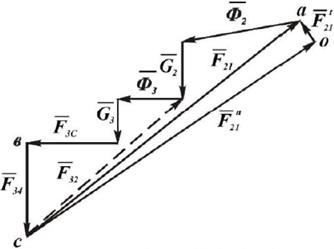
 изображает силу
изображает силу  – силу
– силу 

 и
и  (точка с) в конец вектора
(точка с) в конец вектора  , действующая в точке А. Разумеется
, действующая в точке А. Разумеется  .
. . Так как звено 3 находится в равновесии, то геометрическая сумма всех сил, действующих на него, равна нулю:
. Так как звено 3 находится в равновесии, то геометрическая сумма всех сил, действующих на него, равна нулю: 
 на плане сил (рис. 2) уже имеется. Соединив конец вектора
на плане сил (рис. 2) уже имеется. Соединив конец вектора  с началом вектора
с началом вектора  получаем искомый вектор
получаем искомый вектор  .
.