
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Типы неисправностей цифровых схем.Стр 1 из 9Следующая ⇒
Типы неисправностей цифровых схем. Из множества различных видов неисправностей выделяется класс логических неисправностей, которые изменяют логические функции элементов цифровой схемы. Указанный класс неисправностей занимает доминирующее место среди неисправных цифровых схем. Для их описания в большинстве случаев используются следующие математические модели. 1. Константные неисправности: константный нуль и константная единица, что означает наличие постоянного уровня логического нуля или логической единицы на входах или выходе неисправного логического элемента. Такая модель неисправностей часто называется классической и широко используется в других типах неисправностей. 2. Неисправности типа “короткое замыкание” (мостиковые неисправности) появляются при коротком замыкании входов и выходов логических элементов и подразделяются на два вида: неисправности, вызванные коротким замыканием входов логического элемента, и неисправности типа обратной связи. В зависимости от вида применяемых логических элементов возможно различное действие неисправности на цифровую схему. Так, возникновение мостиковой неисправности между полюсами х1 и х2 трехвходового элемента И эквивалентно фиктивному включению двухвходового элемента И, объединяющие указанные полюса. Подобное действие мостиковой неисправности справедливо для элементов, использующих положительную логику функционирования, и в случае неисправного элемента И не изменяет логическую функцию, реализуемую данным элементом. В то же время возникновение аналогичной неисправности для трехвходового элемента ИЛИ изменяет функцию. реализуемую им, которая принимает следующий вид: f=x1x2+x3. В случае применения элементов с отрицательной логикой функционирования действием мостиковой неисправности, возникшей между входными полюсами логических элементов, является фиктивное включение двухвходового элемента ИЛИ, наличие которого изменяет функцию, реализуемую элементом И. Короткое замыкание типа обратной связи может привести или к возникновению процесса генерирования, или к преобразованию комбинационной в последовательностную. 3. Инверсные неисправности описывают физические дефекты цифровых схем, приводящие к появлению фиктивного инвертора по входу или выходу логического элемента, входящего в данную схему. 4. Неисправности типа “перепутывание” заключаются в перепутывании связей цифровой схемы и вызываются ошибками, возникающими при проектировании и производстве цифровых схем, которые изменяют функции, выполняемые схемой.
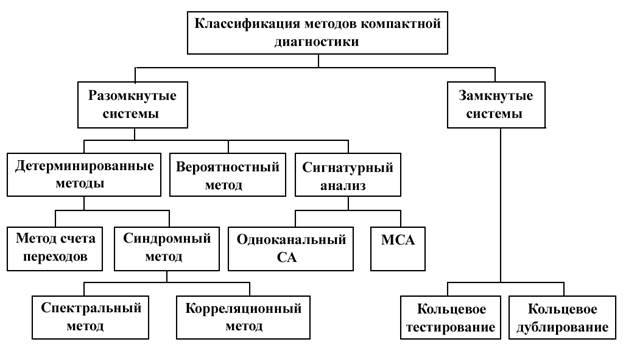
Глава1. Существующие методы компактной диагностики цифровых схем (ЦС). Общая классификация методов компактного тестирования может быть представлена в виде следующей блок-схемы (рис.1.1):
Рис1. 1 Методы компактной диагностики
Рассмотрим каждый из методов подробнее: Детерминированные методы. 1. Метод счета переходов. Широко распространенный и простой способ контроля заключается в том, чтобы подсчитать переходы сигнала из одного состояния в другое и использовать полученное число в качестве идентификатора узла. Общее число изменений состояния тестируемого узла может быть очень большим, поэтому необходим какой-то способ сжатия информации. Обязательным условием счета переходов является определенное " временное окно", в течение которого подсчитываются переходы в узле. В интервале " временного окна" выполняется тест-программа, которая проверяет узел и по возможности должна быть периодической для удобства воспроизведения и сравнения результатов нескольких измерений. В конкретной системе результаты нескольких подсчетов переходов должны быть идентичными. Для применения метода счета переходов (СП) как способа поиска неисправностей необходимо измерить и записать эталонные числа переходов в каждом узле. При возникновении неисправности исследователь запускает тест-программу, измеряет число переходов в подозреваемых узлах и сравнивает их с эталонными значениями. Любые расхождения свидетельствуют о наличии неисправности, и с помощью систематической процедуры ее можно локализовать. 2. Синдромный метод Основные положения синдромного тестирования во многом похожи на положения, рассмотренного ранее, метода счета переходов. Синдромом (контрольной суммой) некоторой булевой функции n переменных является соотношение:
где R представляет собой количество единиц во входной последовательности {y(k)},
Определение понятия синдрома однозначно предполагает использование генераторов счетчиковых последовательностей для формирования всевозможных двоичных комбинаций из n входных переменных при тестировании схемы, реализующей заданную функцию. На практике наиболее важна взаимосвязь синдрома, полученного для выходной последовательности элемента, со значениями синдромов его входных последовательностей, что позволит аналитически определить значения синдромов на всех полюсах схемы. Вероятностный метод. Отличительная особенность данного вида тестирования состоит в применении последовательностей случайных независимых двоичных цифр, подаваемых на входы проверяемой цифровой схемы (ЦС). При этом переменная xi Î {0, 1} i=
Рис. 1.2 Классическая схема вероятностного тестирования
Сигнатурный анализ. Глава 2. Сигнатурный анализ Одним из наиболее эффективных путей поиска неисправностей в цифровых устройствах является применение сигнатурного анализа, методика проведения которого и соответствующие приборы, называемые сигнатурными анализаторами, разработаны сравнительно недавно. Название сигнатурный анализ происходит от слова сигнатура – это число, состоящее из четырех знаков (цифр или букв) шестнадцатеричного кода и условно, но однозначно характеризующее определенный узел контролируемого устройства. Сигнатурный анализ сводится к сопоставлению реальной сигнатуры конкретного узла, отображаемой дисплеем анализатора, с эталонной сигнатурой этого узла, указанной на схеме или в таблице руководства по обслуживанию испытуемого устройства. Несовпадение сигнатур свидетельствует о неисправности; ненормальном функционировании устройства. Одноканальный сигнатурный анализатор. Построить сигнатурный анализатор можно двумя способами: метод свёртки; метод деления полиномов. Структурная типовая схема сигнатурного анализатора, использующая метод свертки, состоит из регистра сдвига RG и сумматора по модулю 2 M2, на входы которого подключены выходы разрядов регистра сдвига в соответствии с порождающим полиномом φ (x) (рис.2.1).
Рис.2.1 Управляющими сигналами сигнатурного анализатора являются СТАРТ, СТОП и СДВИГ. Сигналы СТАРТ и СТОП формируют временной интервал, в течение которого осуществляется процедура сжатия информации на анализаторе. Под действием сигнала СТАРТ элементы памяти регистра сдвига устанавливаются в исходное состояние, как правило, нулевое, а сам регистр начинает выполнять функцию сдвига на один разряд вправо под действием синхронизирующих сигналов СДВИГ. По приходу каждого синхронизирующего импульса в первый разряд регистра сдвига записывается информация, соответствующая выражению:
Таким образом, полное математическое описание функционирования сигнатурного анализатора имеет следующий вид:
Главная идея сигнатурного анализа при использовании метода деления полинома на полином основывается на выполнении операции деления многочленов. В качестве делимого используется поток данных, формируемых на выходе анализируемого цифрового узла, который может быть представлен как многочлен где Пример формирования сигнатуры для потока данных 11110101, описываемого полиномом
Аппаратурная реализация сигнатурного анализатора приведена на рис.2.2
Рис.2.2 Здесь а1, а2 , а3 элементы памяти (D-триггеры), Пример формирования сигнатуры для потока данных 11110101, описываемого полиномом χ (х)=х7+х6+x5+х4+x2+1, и делителя φ (х)=х3+x2+1 приведен на рис.2.3.
q(x)= (10111)2 =x4+x2+x+1 S(x)=(110)=x2+x Рис 2.3 Таким образом, показано, что остаток от деления χ (х) на φ (х) есть сигнатура, полученная на анализаторе в результате сжатия последовательности χ (х), Для реализации сигнатурного анализатора, описываемого полиномом φ (х)=х3+x2+1 (рис.2.2), существует альтернативная структура, которая является более предпочтительной с точки зрения аппаратурного построения и называется методом свертки. При реализации метода свертки используются внешние сумматоры по модулю два. Для построения сигнатурного анализатора используется обратный полином
Рис.2.4 Однако, результат с(х), получаемый при свертке последовательности р(х) на сигнатурном анализаторе с внешними сумматорами по модулю два не совпадает с остатком от деления, т. е. с(х) S(x)= Здесь с(х) - результат свертки на сигнатурном анализаторе, описываемом полиномом ψ (х); s(x) остаток от деления многочлена χ (х) на полином φ (х), коэффициенты α принадлежат полиному φ (х). Для частного случая, представленного на рис.2.2 и 2.4 S(x)= Таким образом, путём формирования тестовой последовательности на входах анализируемого цифрового устройства для каждого его полюса находим эталонные значения сигнатур, множество которых запоминается и в дальнейшем используется для сравнения со значениями сигнатур, снимаемых с проверяемых устройств. Любое отличие реально полученной сигнатуры от эталонной свидетельствует о том, что полюс схемы функционирует отлично от случая исправного состояния устройства. Причина, вызвавшая отличие сигнатур на данном полюсе, может быть установлена последовательным анализом сигнатур от указанного полюса к входам устройства. Эффективность использования такого сигнатурного анализатора ограничивается наличием в нём только одного информационного входа, в то время как количество выходов сложных цифровых узлов достигает значительных величин. Исследование подобных узлов осуществляется с использованием нескольких сигнатурных анализаторов, путём свёртки по модулю два выходных последовательностей или с применением некоторых других схемных решений. Применение таких подходов для анализа многовыходных цифровых схем приводит или к существенному увеличению аппаратурных затрат, или к уменьшению величины вероятности P обнаружения ошибки. Поэтому для многовыходных цифровых узлов создание высокоэффективных цифровых анализаторов весьма актуально. Глава3. Кольцевое тестирование. Рассмотрим КТ комбинационного дискретного устройства (ДУ), которое является простым объектом тестирования. Из опыта практических разработок систем компактного тестирования достаточно хорошо известно раздельное применение генераторов и анализаторов, реализованных на счетчиках и регистрах. В системах кольцевого тестирования комбинационного ДУ механизм совмещения функций генератора и анализатора как в пространстве, так и во времени осуществляется наиболее просто. Пусть ДУ имеет
Линейная последовательная система (рис.1.2) содержит комбинационное корректирующее устройство КУ,
Посредством обратной связи, реализуемой соединением выхода Процесс тестирования ДУ осуществляется в моменты
Рис.3.2. Линейная система кольцевого тестирования.
Суммирование проводится по mod 2. Начальные условия 3.3 задаются набором значений:
соответствующих начальному состоянию Рг r. Будем рассматривать строго периодические ЛПОС. Это означает, что для последовательности Для анализа периодичности ЛПОС используются свойства кольца многочленов над полем
с элементами из
Если Основу синтеза ЛПОС периода Из выше сказанного следует, что если ДУ описывается системой булевых функций 3.1, то для того, чтобы построить КУ, нужно найти сумму функций ДУ:
которую выражают многочленом Жегалкина:
где
…………………
…………………
…………………
………………...
Свободные члены системы определяются вычислением значений функции Сформулируем задание на синтез КУ со схемой
Поскольку функция
где В процессе функционирования ЛПОС на входах ДУ формируются двоичные наборы
где
— сопровождающая матрица неприводимого многочлена
Это даёт возможность устанавливать факт исправности ДУ можно посредством наблюдения одинаковых состояний (выходов) Рг r до и после тестирования. В процессе тестирования Рг r устанавливается в начальное состояние, затем подаётся Глава4. Достоверность кольцевого тестирования для максимального периода. При кольцевом тестировании (КТ) результат проверки получается при наблюдении поведения автономного генератора, в который преобразуется проверяемый элемент. В тестовом режиме генератор устанавливается в начальное состояние, затем подаются При проверке исправности в системе КТ из-за отсутствия потактного сравнения фактических ответов ДУ с эталонными ответами существует риск принять неисправное ДУ за исправное. Поскольку решение об исправности принимается в результате сравнения рекуррентной свертки этих ответов с эталоном, то возможно появление неправильных ответов, не изменяющих результата свертки. Подобный риск существует в большинстве диагностических систем, использующих сжатие ответов. Для оценки степени этого риска будем применять такой показатель, как достоверность тестирования. Множество
где Имеется несколько методов определения достоверности, но все они сводятся к определению достоверности по формуле (4.1) Таким образом, разница в определении достоверности различными способами заключается в разнице определения вероятности необнаружения неисправностей 1. Произведём подсчёт
то с учётом неисправностей ДУ это равенство будет выполняться для всех неприводимых нормированных многочленов
где суммирование проводится по всем делителям
Формула (1.3) может быть переписана в виде:
где
2. Второй способ отличается от первого иным определением
Если решение об исправности ДУ принимается по результату выполнения равенства (3.11) в такте
где
В этом случае для выражения (4.6) имеет вид:
где Оба способа определения достоверности кольцевого тестирования дают примерно одинаковые результаты. Если
Это выражение является нижней границей определения достоверности кольцевого тестирования. Верхней границей определения достоверности КТ является выражение:
Таким образом, достоверность КТ лежит в пределах:
Определим далее достоверность тестирования во множестве неисправных модификаций ЛПОС. Пусть проверяемая ЛПОС преобразована в автономную ЛПОС (АЛПОС) введением обратной связи, так что уравнение переходов состояний АЛПОС имеет вид:
где Таким образом, мощность множества
Имеет место теорема. Теорема. Пусть характеристический многочлен АЛПОС является неприводимым многочленом степени
Формула (6.15) для достоверности
Причём это выполняется даже если максимальный период не является простым числом. Типы неисправностей цифровых схем. Из множества различных видов неисправностей выделяется класс логических неисправностей, которые изменяют логические функции элементов цифровой схемы. Указанный класс неисправностей занимает доминирующее место среди неисправных цифровых схем. Для их описания в большинстве случаев используются следующие математические модели. 1. Константные неисправности: константный нуль и константная единица, что означает наличие постоянного уровня логического нуля или логической единицы на входах или выходе неисправного логического элемента. Такая модель неисправностей часто называется классической и широко используется в других типах неисправностей. 2. Неисправности типа “короткое замыкание” (мостиковые неисправности) появляются при коротком замыкании входов и выходов логических элементов и подразделяются на два вида: неисправности, вызванные коротким замыканием входов логического элемента, и неисправности типа обратной связи. В зависимости от вида применяемых логических элементов возможно различное действие неисправности на цифровую схему. Так, возникновение мостиковой неисправности между полюсами х1 и х2 трехвходового элемента И эквивалентно фиктивному включению двухвходового элемента И, объединяющие указанные полюса. Подобное действие мостиковой неисправности справедливо для элементов, использующих положительную логику функционирования, и в случае неисправного элемента И не изменяет логическую функцию, реализуемую данным элементом. В то же время возникновение аналогичной неисправности для трехвходового элемента ИЛИ изменяет функцию. реализуемую им, которая принимает следующий вид: f=x1x2+x3. В случае применения элементов с отрицательной логикой функционирования действием мостиковой неисправности, возникшей между входными полюсами логических элементов, является фиктивное включение двухвходового элемента ИЛИ, наличие которого изменяет функцию, реализуемую элементом И. Короткое замыкание типа обратной связи может привести или к возникновению процесса генерирования, или к преобразованию комбинационной в последовательностную. 3. Инверсные неисправности описывают физические дефекты цифровых схем, приводящие к появлению фиктивного инвертора по входу или выходу логического элемента, входящего в данную схему. 4. Неисправности типа “перепутывание” заключаются в перепутывании связей цифровой схемы и вызываются ошибками, возникающими при проектировании и производстве цифровых схем, которые изменяют функции, выполняемые схемой.
Глава1. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 3474; Нарушение авторского права страницы

 , l=2n.
, l=2n. , подаваемая на i-тый вход, описывается вероятностью P(xi=1) ее единичного значения. Определяется зависимость выходных вероятностей для цифровой схемы от вероятностей P(xi=1) i=
, подаваемая на i-тый вход, описывается вероятностью P(xi=1) ее единичного значения. Определяется зависимость выходных вероятностей для цифровой схемы от вероятностей P(xi=1) i= 

 (2.1) В этом выражении
(2.1) В этом выражении  - k-й символ сжимаемой последовательности {y(k)},
- k-й символ сжимаемой последовательности {y(k)},  , где l-длина сжимаемой последовательности,
, где l-длина сжимаемой последовательности,  - коэффициенты порождающего полинома
- коэффициенты порождающего полинома 
 - содержимое i-го элемента памяти регистра сдвига в k-1-й такт. Процедура сдвига информации в регистре описывается отношением
- содержимое i-го элемента памяти регистра сдвига в k-1-й такт. Процедура сдвига информации в регистре описывается отношением  ,
,  .
. ,
, 
 , (2.2) причем l-длина сжимаемой последовательности, как правило, принимается равной или меньше величины 2m-1. По истечении l тактов функционирования сигнатурного анализатора на его элементах памяти фиксируется двоичный код, который представляет собой сигнатуру.
, (2.2) причем l-длина сжимаемой последовательности, как правило, принимается равной или меньше величины 2m-1. По истечении l тактов функционирования сигнатурного анализатора на его элементах памяти фиксируется двоичный код, который представляет собой сигнатуру. степени
степени  , где
, где  - длина потока. Делителем служит примитивный неприводимый полином
- длина потока. Делителем служит примитивный неприводимый полином  , в результате деления на который получается частное
, в результате деления на который получается частное  и остаток
и остаток  , связанные соотношением:
, связанные соотношением:  , (2.3)
, (2.3) остаток, представляющий собой полином степени
остаток, представляющий собой полином степени  , называется сигнатурой.
, называется сигнатурой. , и делителя
, и делителя  приведен на рис.2.2.
приведен на рис.2.2.

 ;
;  В нашем случае
В нашем случае  . Аппаратурная реализация такого анализатора представлена на рис. 2.4.
. Аппаратурная реализация такого анализатора представлена на рис. 2.4.
 ≠ s(х). В нашем случае С(х)=(100)2 . В то же время между с(х) и s(x) существует однозначная связь, которая в общем случае определяется выражением
≠ s(х). В нашем случае С(х)=(100)2 . В то же время между с(х) и s(x) существует однозначная связь, которая в общем случае определяется выражением (2.4)
(2.4) , S(x)=(110)2 (2.5)
, S(x)=(110)2 (2.5) входов и
входов и  выходов и описывается системой булевых функций:
выходов и описывается системой булевых функций: 
 . (3.1)
. (3.1) разрядный сдвиговый регистр Рг r, схемы свертки выходов по mod 2
разрядный сдвиговый регистр Рг r, схемы свертки выходов по mod 2  . Назначение КУ состоит в аппаратурной линеаризации ДУ, в результате которой на выходе
. Назначение КУ состоит в аппаратурной линеаризации ДУ, в результате которой на выходе  . (3.2)
. (3.2) под действием тактовых импульсов сдвига Рг r и при исправности ЛПОС описывается рекуррентным уравнением:
под действием тактовых импульсов сдвига Рг r и при исправности ЛПОС описывается рекуррентным уравнением: 
 . (3.3)
. (3.3) ,
,  ,
,  ,
,  ,
,  , представляющей собой решение уравнения 3.3, существует такое натуральное значение
, представляющей собой решение уравнения 3.3, существует такое натуральное значение  , что
, что  для любого
для любого  .
. . По определению многочлен от одной переменной может быть записан в виде последовательности
. По определению многочлен от одной переменной может быть записан в виде последовательности
 . (3.4)
. (3.4) наименьшее целое положительное число, для которого
наименьшее целое положительное число, для которого  делится на многочлен
делится на многочлен  , то решение уравнения 1.3 периодично с периодом
, то решение уравнения 1.3 периодично с периодом  )/
)/  многочлена (3.4).
многочлена (3.4).
 ,
,  или 1, а суммирование выполняется по всем подмножествам
или 1, а суммирование выполняется по всем подмножествам  множества
множества  . Представление функции
. Представление функции  в виде многочлена Жегалкина позволяет выявить свойства, связанные с линейностью и нелинейностью ДУ. Для получения этого многочлена необходимо определить коэффициенты-решения
в виде многочлена Жегалкина позволяет выявить свойства, связанные с линейностью и нелинейностью ДУ. Для получения этого многочлена необходимо определить коэффициенты-решения  системы уравнений над
системы уравнений над  ;
;  ;
;  ;
;  ;
;  ;
;  .
. на всех
на всех  наборах аргументов. Решение системы может быть получено применением метода Гаусса.
наборах аргументов. Решение системы может быть получено применением метода Гаусса. ,
,  оказывается выраженной многочленом Жегалкина, то в общем случае для реализации её слагаемых
оказывается выраженной многочленом Жегалкина, то в общем случае для реализации её слагаемых ,
,  или 1,
или 1,  , корректирующее устройство содержит соединения и схемы совпадения. Их выходы подключаются ко входам
, корректирующее устройство содержит соединения и схемы совпадения. Их выходы подключаются ко входам  корректирующее устройство не содержит схем совпадения и состоит только из соединений выходов Рг r со входами
корректирующее устройство не содержит схем совпадения и состоит только из соединений выходов Рг r со входами  , согласно рекуррентному соотношению
, согласно рекуррентному соотношению
 , (3.5)
, (3.5) вектор-столбец;
вектор-столбец; 
 единичная матрица, из 5.5 имеем:
единичная матрица, из 5.5 имеем: 
 неисправных модификаций ЛПОС разбивается на классы эквивалентности
неисправных модификаций ЛПОС разбивается на классы эквивалентности  , которые представляются многочленами
, которые представляются многочленами 
 над
над  . Тем самым рассматриваются неисправности, преобразующие систему в линейные неисправные модификации. Предполагается, что исправная ЛПОС описывается неприводимым нормированным многочленом
. Тем самым рассматриваются неисправности, преобразующие систему в линейные неисправные модификации. Предполагается, что исправная ЛПОС описывается неприводимым нормированным многочленом  той степени, а появление любого из
той степени, а появление любого из  " неисправных" многочленов происходит с вероятностью
" неисправных" многочленов происходит с вероятностью  . Здесь
. Здесь  для комбинационного ДУ,
для комбинационного ДУ,  для не зависящего от входа ДУ,
для не зависящего от входа ДУ,  для не зависящего от выхода ДУ,
для не зависящего от выхода ДУ,  или
или  для зависящего от входа и выхода ДУ,
для зависящего от входа и выхода ДУ,  для произвольного ДУ в системе КД. Определим достоверность тестирования в множестве представителей классов
для произвольного ДУ в системе КД. Определим достоверность тестирования в множестве представителей классов  . Для этого достоверность будем находить по формуле:
. Для этого достоверность будем находить по формуле:  , (4.1)
, (4.1) вероятность необнаружения неисправностей, вычисляемая при предположении о равновероятностном появлении дефектов.
вероятность необнаружения неисправностей, вычисляемая при предположении о равновероятностном появлении дефектов. . Рассмотрим эти методы.
. Рассмотрим эти методы. для случая примитивного
для случая примитивного  . Поскольку исправность ДУ устанавливается по факту выполнения равенства:
. Поскольку исправность ДУ устанавливается по факту выполнения равенства: 
 , (4.2)
, (4.2) , (4.3)
, (4.3) числа
числа  функция Мёбиуса:
функция Мёбиуса:  1, если
1, если  ;
;  , если
, если  .
. , (4.4)
, (4.4) ;
;  различные простые делители числа
различные простые делители числа  кратность делителей. Учитывая, что появления исправной и неисправной модификаций системы представляют собой равновероятные и взаимоисключающие исходы, для системы максимального периода имеем:
кратность делителей. Учитывая, что появления исправной и неисправной модификаций системы представляют собой равновероятные и взаимоисключающие исходы, для системы максимального периода имеем:  .
. . А сама достоверность рассчитывается по формуле:
. А сама достоверность рассчитывается по формуле:  . (4.5)
. (4.5) и невыполнения в тактах
и невыполнения в тактах  1, 2, …,
1, 2, …,  , (4.6)
, (4.6) функция Эйлера, которая может быть выражена через функцию Мёбиуса следующим образом:
функция Эйлера, которая может быть выражена через функцию Мёбиуса следующим образом:  .
. , (4.7)
, (4.7) простые делители числа
простые делители числа  .
. .
. .
. ,
,  вектор-столбец состояний АЛПОС;
вектор-столбец состояний АЛПОС;  характеристическая матрица над
характеристическая матрица над  . Дополнительное оборудование, необходимое в тестовом режиме, состоит из дополнительных входов и выходов ЛПОС, используемых только в тестовом режиме, а также дополнительной ЛПОС, включаемой в контур обратной связи проверяемой ЛПОС. Под неисправностью проверяемой ЛПОС будем понимать физический дефект, приводящий к искажению матрицы
. Дополнительное оборудование, необходимое в тестовом режиме, состоит из дополнительных входов и выходов ЛПОС, используемых только в тестовом режиме, а также дополнительной ЛПОС, включаемой в контур обратной связи проверяемой ЛПОС. Под неисправностью проверяемой ЛПОС будем понимать физический дефект, приводящий к искажению матрицы  АЛПОС. Зададим неисправности в виде множества искажённых матриц
АЛПОС. Зададим неисправности в виде множества искажённых матриц  , где
, где  матрица размера
матрица размера  . Так как достоверность определяется по формуле 1.1, где
. Так как достоверность определяется по формуле 1.1, где  матрицы
матрицы  различных матриц
различных матриц  представляет один из классов
представляет один из классов  . (4.8)
. (4.8) . (4.9)
. (4.9) , а
, а 

 , тогда получаем:
, тогда получаем:  . (4.10)
. (4.10)