
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Лекция 2 Динамика твердого тела. Законы сохранения
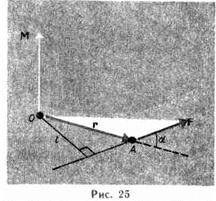
План 1. Момент силы и момент импульса тела относительно неподвижной оси вращения. Момент инерции относительно оси. Уравнение динамики вращательного движения твердого тела относительно неподвижной оси. Кинетическая энергия вращающегося тела. 2. Центр масс механической системы и закон его движения. Закон сохранения импульса как фундаментальный закон природы и связь с однородностью пространства. 3. Закон сохранения механической энергии. Закон сохранения момента импульса. Тезисы 1. Неинерциальные системы отсчета – системы отсчета, движущиеся относительно инерциальной системы с ускорением. В неинерциальных системах законы Ньютона несправедливы. Если же учесть силы инерции, то второй закон Ньютона будет справедлив для любой системы отсчета. Силы инерции – силы, обусловленные ускоренным движением системы отсчета относительно измеряемой системы отсчета. Второй закон Ньютона в неинерциальных системах отсчета Произведение массы тела на ускорение в рассматриваемой системе отсчета равно сумме всех сил, действующих на данное тело (включая и силы инерции) Основной закон динамики для неинерциальных систем отсчета Абсолютно твердое тело – это тело, расстояние между двумя точками которого при любых условиях остается постоянным. Момент силы F относительно неподвижной точки О - физическая величина, определяемая векторным произведением радиуса-вектора г, проведенного из точки О в точку А приложения силы, на силу F (рис. 25): Модуль вектора момента силы Момент силы относительно неподвижной оси z - скалярная величина Мz, равная проекции на эту ось вектора М момента силы, определенного относительно произвольной точки О данной оси Z (рис.26). Значение момента Мz не зависит от выбора положения точки О на оси. Если ось Z совпадает с направлением вектора М, то момент силы представляется в виде вектора, совпадающего с осью
Уравнение динамики вращательного движения твердого тела относительно неподвижной оси Момент инерции тела относительно оси вращения - физическая величина, равная сумме произведений элементарных масс на квадраты их расстояний до рассматриваемой оси Теорема Штейнера: момент инерции тела J относительно любой оси вращения равен моменту его инерции Jc относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы mтела на квадрат расстояния а между осями Кинетическая энергия вращающегося твердого тела Кинетическая энергия тела при его плоском движении складывается из энергии поступательного движения со скоростью, равной скорости центра масс, и энергии вращения вокруг оси, проходящей через центр масс тела Центр масс (или центр инерции) системы материальных точек - воображаемая точка С, положение которой характеризует распределение массы этой системы. Радиус-вектор центра масс Закон сохранения импульса: импульс замкнутой системы сохраняется. Этот закон – фундаментальный закон природы (он универсален), следствие однородности пространства. Однородность пространства заключается в том, что при параллельном переносе в пространстве замкнутой системы тел как целого ее физические свойства и законы движения не изменяются, иными словами, не зависят от выбора положения начала координат инерциальной системы отсчета. Импульс сохраняется и для незамкнутой системы, если геометрическая сумма всех внешних сил равна нулю. Из закона сохранения импульса вытекает, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остается неподвижным. Работа силы – количественная характеристика процесса обмена энергией между взаимодействующими телами. Работа постоянной силы, составляющей угол с направлением прямолинейного движения тела В общем случае сила может изменяться как по модулю, так и по направлению, поэтому вышеуказанной формулой пользоваться нельзя. Элементарная работа силы F на перемещении Работа силы на участке траектории от точки 1 до точки 2 равна алгебраической сумме элементарных работ на отдельных бесконечно малых участках пути. Эта сумма приводится к интегралу
При a< p/2 работа силы положительна, в этом случае составляющая Fs совпадает по направлению с вектором скорости движения v (см. рис. 13). Если a> p/2, то работа силы отрицательна. При a=p/2 (сила направлена перпендикулярно перемещению) работа силы равна нулю. Единица работы — джоуль (Дж): 1 Дж — работа, совершаемая силой в 1 Н на пути в 1 м (1 Дж = 1 Н•м). Мощность – скалярная физическая величина, характеризующая скорость совершения работы
Кинетическая энергия механической системы — это энергия механического движения этой системы. Связь работы и кинетической энергии: работа силы на пути, который тело прошло за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии тела, т. е.
Теорема о кинетической энергии: Приращение кинетической энергии материальной точки на некотором перемещении равно алгебраической сумме работ всех сил, действующих на точку на том же перемещении Потенциальное поле – поле, в котором работа, совершаемая силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положения. Работа консервативных сил по замкнутой траектории Конкретный вид функции П зависит от характера силового поля. Например, потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли, равна 3. Полная механическая энергия системы — энергия механического движения и взаимодействия, т. е. равна сумме кинетической и потенциальной энергий Закон сохранения механической энергии: в системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется, т. е. не изменяется со временем Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами. Закон сохранения механической энергии можно сформулировать так: в консервативных системах полная механическая энергия сохраняется. Закон сохранения механической энергии – следствие однородности времени, т. е. физические законы инвариантны относительно выбора начала отсчета времени. Например, при свободном падении тела в поле сил тяжести его скорость и пройденный путь зависят лишь от начальной скорости и продолжительности свободного падения тела и не зависят от того, когда тело начало падать. В системе, в которой действуют также неконсервативные силы, например силы трения, полная механическая энергия системы не сохраняется. Момент импульса материальной точки А относительно неподвижной точки О - физическая величина, определяемая векторным произведением Закон динамики вращательного движения твердого тела относительно неподвижной оси
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 943; Нарушение авторского права страницы
 , где а – ускорение тела в инерциальной системе отсчета. Есть три возможных случая проявления сил инерции: силы инерции при ускоренном поступательном движении системы отсчета; силы инерции, действующие на тело, покоящееся во вращающейся системе отсчета; силы инерции, действующие на тело, движущееся во вращающейся системе отсчета.
, где а – ускорение тела в инерциальной системе отсчета. Есть три возможных случая проявления сил инерции: силы инерции при ускоренном поступательном движении системы отсчета; силы инерции, действующие на тело, покоящееся во вращающейся системе отсчета; силы инерции, действующие на тело, движущееся во вращающейся системе отсчета. В неинерциальных системах отсчета третий закон Ньютона, а также законы сохранения импульса, энергии и момента импульса не выполняются!!!
В неинерциальных системах отсчета третий закон Ньютона, а также законы сохранения импульса, энергии и момента импульса не выполняются!!!  . Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от г к F.
. Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от г к F. , где a — угол между г и F; rsina = l — кратчайшее расстояние между линией действия силы и точкой О - плечо силы.
, где a — угол между г и F; rsina = l — кратчайшее расстояние между линией действия силы и точкой О - плечо силы.

 . Если ось вращения совпадает с главной осью инерции, проходящей через центр масс, то
. Если ось вращения совпадает с главной осью инерции, проходящей через центр масс, то  , где J — главный момент инерции тела (момент инерции относительно главной оси).
, где J — главный момент инерции тела (момент инерции относительно главной оси). Момент инерции – величина аддитивная; момент инерции тела равен сумме моментов инерции его частей. В случае непрерывного распределения масс эта сумма сводится к интегралу
Момент инерции – величина аддитивная; момент инерции тела равен сумме моментов инерции его частей. В случае непрерывного распределения масс эта сумма сводится к интегралу  , где интегрирование производится по всему объему тела.
, где интегрирование производится по всему объему тела.
 , где
, где  - момент инерции тела относительно оси Z.
- момент инерции тела относительно оси Z.
 , где mi и ri — соответственно масса и радиус-вектор i-й материальной точки; n — число материальных точек в системе. Скорость центра масс
, где mi и ri — соответственно масса и радиус-вектор i-й материальной точки; n — число материальных точек в системе. Скорость центра масс  . Импульс системы материальных точек
. Импульс системы материальных точек  , т. е. импульс системы равен произведению массы системы на скорость ее центра масс. Закон движения центра масс
, т. е. импульс системы равен произведению массы системы на скорость ее центра масс. Закон движения центра масс  , т. е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, действующих на систему. Производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему
, т. е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, действующих на систему. Производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему  . В случае отсутствия внешних сил (замкнутая система)
. В случае отсутствия внешних сил (замкнутая система)  или
или 
 равна произведению проекции силы Fs на направление перемещения, умноженной на перемещение точки приложения силы.
равна произведению проекции силы Fs на направление перемещения, умноженной на перемещение точки приложения силы. -скалярная величина
-скалярная величина  , где
, где  - угол между векторами F и dr; ds = |dr| — элементарный путь; Fs — проекция вектора F на вектор dr (рис. 13).
- угол между векторами F и dr; ds = |dr| — элементарный путь; Fs — проекция вектора F на вектор dr (рис. 13). Для вычисления этого интеграла надо знать зависимость силы Fs от пути s вдоль траектории 1—2. Если эта зависимость представлена графически (рис. 14), тогда искомая работа А определяется на графике площадью закрашенной фигуры.
Для вычисления этого интеграла надо знать зависимость силы Fs от пути s вдоль траектории 1—2. Если эта зависимость представлена графически (рис. 14), тогда искомая работа А определяется на графике площадью закрашенной фигуры.


 или
или  . Единица мощности — ватт (Вт): 1 Вт — мощность, при которой за время 1 с совершается работа в 1 Дж (1 Вт = 1 Дж/с).
. Единица мощности — ватт (Вт): 1 Вт — мощность, при которой за время 1 с совершается работа в 1 Дж (1 Вт = 1 Дж/с). . Тело массой т, движущееся со скоростью v, обладает кинетической энергией
. Тело массой т, движущееся со скоростью v, обладает кинетической энергией  . Характерные свойства кинетической энергии: 1) всегда положительна; 2) неодинакова в разных системах отсчета; 3) является функцией состояния системы. Работа силы при перемещении из точки 1 в точку 2
. Характерные свойства кинетической энергии: 1) всегда положительна; 2) неодинакова в разных системах отсчета; 3) является функцией состояния системы. Работа силы при перемещении из точки 1 в точку 2 или
или 

 Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними. Характерные особенности потенциальной энергии: Потенциальную энергию тела в каком-то определенном положении считают равной нулю, а энергию тела в других положениях отсчитывают относительно нулевого уровня. Потенциальная энергия может быть определена по формуле
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними. Характерные особенности потенциальной энергии: Потенциальную энергию тела в каком-то определенном положении считают равной нулю, а энергию тела в других положениях отсчитывают относительно нулевого уровня. Потенциальная энергия может быть определена по формуле  , где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Связь между консервативной силой и потенциальной энергией
, где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Связь между консервативной силой и потенциальной энергией  , где
, где  - градиент.
- градиент. , Потенциальная энергия упругодеформированного тела (пружины)
, Потенциальная энергия упругодеформированного тела (пружины)  Потенциальная энергия системы, подобно кинетической энергии, является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам.
Потенциальная энергия системы, подобно кинетической энергии, является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам.

 , где r — радиус-вектор, проведенный из точки О в точку A; p - импульс материальной точки (рис.28); L—псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к p. Модуль вектора момента импульса
, где r — радиус-вектор, проведенный из точки О в точку A; p - импульс материальной точки (рис.28); L—псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к p. Модуль вектора момента импульса  , где
, где  направлен по оси в сторону, определяемую правилом правого винта. Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц
направлен по оси в сторону, определяемую правилом правого винта. Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц  или
или  : Момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость.
: Момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость. : производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси или производная вектора момента импульса твердого тела равна моменту (сумме моментов) внешних сил
: производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси или производная вектора момента импульса твердого тела равна моменту (сумме моментов) внешних сил  В замкнутой системе момент внешних сил равен нулю, поэтому
В замкнутой системе момент внешних сил равен нулю, поэтому  . Это - закон сохранения момента импульса: момент импульса замкнутой системы сохраняется. Закон сохранения момента импульса -фундаментальный закон природы, он связан со свойством симметрии пространства- его изотропностью, т.е. с инвариантностью физических законов относительно выбора направления осей координат системы отсчета (относительно поворота замкнутой системы в пространстве на любой угол).
. Это - закон сохранения момента импульса: момент импульса замкнутой системы сохраняется. Закон сохранения момента импульса -фундаментальный закон природы, он связан со свойством симметрии пространства- его изотропностью, т.е. с инвариантностью физических законов относительно выбора направления осей координат системы отсчета (относительно поворота замкнутой системы в пространстве на любой угол).