
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема 2.2 Электродинамическая и ферродинамическая системы
Студент должен знать: - принцип работы измерительных систем; - значение угла поворота стрелки; - достоинства и недостатки данных измерительных механизмов; - применение в измерениях.
Электродинамическая система: схема устройства, угол поворота подвижной части, логометры, защита от внешних магнитных полей. Ферродинамическая система, особенности работы, погрешности измерений. Достоинства и недостатки систем, применение.
Материал для изучения
Электродинамическая система Принцип работы приборов электродинамической системы (рис. 2.2.1) основан на взаимодействии магнитных полей подвижной и неподвижной катушек.
Внутри неподвижной катушки 4 проходит ось 1 с закрепленными на ней подвижной катушкой 5, указательной стрелкой 3 и крылом воздушного успокоителя 6. Неподвижная катушка обычно состоит из двух половин, изготовленных так, чтобы обеспечить возможно более равномерное магнитное поле между ними. Для создания противодействующего момента и подвода измеряемого тока к концам обмотки подвижной катушки служат две спиральные пружины 2. Подвижная катушка обычно выполняется с большим числом витков малого сечения и, следовательно, обладает большим сопротивлением. Неподвижная катушка имеет малое число витков большого сечения. При прохождении измеряемого тока по обмоткам обеих катушек (которые в зависимости от назначения прибора могут соединяться между собой последовательно или параллельно) вследствие взаимодействия возникающих при этом магнитных полей создается вращающий момент, поворачивающий подвижную катушку таким образом, чтобы ее магнитное поле совпало по направлению с магнитным полем неподвижной катушки. Принцип действия приборов электродинамической системы аналогичен принципу действия приборов магнитоэлектрической системы и отличается лишь тем, что у первых магнитное поле создается током, протекающим по неподвижной катушке, а у вторых – постоянным магнитом. В отличие от приборов магнитоэлектрической системы изменение полярности в электродинамических приборах не сказывается на направлении отклонения подвижной части: благодаря одновременному изменению направления тока в обеих катушках направление вращающего момента остается неизменным. Так как собственное магнитное поле приборов невелико (около 3 % напряженности поля магнитоэлектрических приборов), успокоение колебаний подвижной части обычно производится воздушным успокоителем. Однако в экранированных приборах, где катушки защищены от внешних полей экраном, затрудняющим применение воздушных успокоителей, используются магнитные успокоители. В магнитном поле двух катушек с постоянными токами I1 и I2, как известно, запасается энергия
где L1 и L2 – индуктивности катушек; М12 – их взаимная индуктивность. Взаимодействие этих токов вызывает вращающий момент, стремящийся повернуть подвижную катушку в положение, при котором энергия магнитного поля катушек будет наибольшей. Этот момент равен
где da - приращение угла, при котором энергия поля получает приращение dWМ. Так как индуктивности катушек L1 и L2 неизменны, то dL1 = dL2 = 0 и вращающий момент dM12 / da = f (a) определяется формой катушек и их взаимным расположением. Приняв в первом приближении отношение dM12 / da = k1 постоянным, получим выражение вращающего момента M = k1 I1 I2, откуда
Если по катушкам измерительного механизма проходят переменные токи i1 и i2, то мгновенный вращающий момент M = k1 i1 i2, а средний за период вращающий момент Популярное:
|
Последнее изменение этой страницы: 2016-03-26; Просмотров: 970; Нарушение авторского права страницы

 ,
,  ,
,  . Из этого следует, что вращающий момент зависит от токов I1 и I2 и от положения подвижной катушки относительно неподвижной. Зависимость скорости изменения взаимной индуктивности от угла поворота подвижной катушки
. Из этого следует, что вращающий момент зависит от токов I1 и I2 и от положения подвижной катушки относительно неподвижной. Зависимость скорости изменения взаимной индуктивности от угла поворота подвижной катушки . Таким образом, вращающий момент и угол поворота подвижной части пропорциональны произведению токов в катушках.
. Таким образом, вращающий момент и угол поворота подвижной части пропорциональны произведению токов в катушках.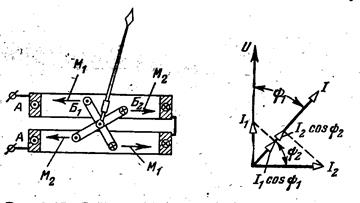
 . Если, например, токи i1 и i2 синусоидальны и сдвинуты по фазе на угол y, т.е.
. Если, например, токи i1 и i2 синусоидальны и сдвинуты по фазе на угол y, т.е.  и
и  , то, выполнив подстановку, получим:
, то, выполнив подстановку, получим:  . Положение равновесия подвижной части определяется равенством М ср = М пр, откуда
. Положение равновесия подвижной части определяется равенством М ср = М пр, откуда  . Следовательно, при переменном токе вращающий момент и угол поворота подвижной части измерительного механизма зависят от произведения действующих значений токов в катушках и косинуса угла сдвига фаз между ними.
. Следовательно, при переменном токе вращающий момент и угол поворота подвижной части измерительного механизма зависят от произведения действующих значений токов в катушках и косинуса угла сдвига фаз между ними.