
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема 2.3 Индукционная и другие измерительные системы
Студент должен знать: - принцип работы измерительных систем; - значение угла поворота стрелки; - достоинства и недостатки данных измерительных механизмов; - применение в измерениях.
Индукционная измерительная система: устройство, векторная диаграмма, принцип работы, вращающий момент, применение. Электростатическая система: устройство, угол поворота подвижной части, защита от внешних электрических полей, применение. Вибрационная, выпрямительная, термоэлектрическая системы. Особенности работы, достоинства и недостатки, применение.
Материал для изучения
Индукционная система. Принцип работы приборов индукционной системы основан на действии вращающегося, бегущего или переменного магнитного поля переменного тока (создаваемого одним или несколькими неподвижными электромагнитами) на подвижную часть, представляющую собой чаще всего металлический диск. Укрепленный на одной оси с указательной стрелкой алюминиевый диск помещается между электромагнитами таким образом, что их магнитные потоки, пронизывая диск, индуцируют в нем ЭДС и токи. Взаимодействие между индуцированными токами и переменными потоками электромагнитов вызывает вращение диска. Индукционные приборы разделяются на однопоточные, вращающий момент которых создается взаимодействием одного потока и тока, и многопоточные, вращающий момент которых создается взаимодействием нескольких (не менее двух) потоков и токов.
В однопоточных приборах (рис. 2.3.1, а) создаваемый катушкой 1 переменный магнитный поток пронизывает алюминиевый диск 3, индуцируя в нем ЭДС и токи. Укрепленный на асимметрично расположенной оси 2 диск перекрывает (экранирует) часть силовых линий магнитного поля катушки. Под влиянием сил взаимодействия потока и индуцированных токов диск поворачивается в сторону уменьшения его площади, находящейся в зоне действия магнитного поля. На рис. 2.3, 1, б приведена принципиальная схема устройства простейшего двухпоточного прибора с одним электромагнитом и медным экраном. Переменный магнитный поток катушки 1 частично перекрывается экраном 3 и разбивается на две части: 1) пронизывающую часть диска 2, расположенную против экрана, и 2) пронизывающую часть диска, не закрытую экраном. Наличие экрана создает два пронизывающих диск потока, смещенных в пространстве. Кроме того, вследствие дополнительных потерь на вихревые токи в экране первый поток отстает по фазе от второго потока. Оба потока, сдвинутые по фазе и в пространстве, создают бегущее поле, поворачивающее диск в сторону направления вращения поля (от части полюса, не закрытой экраном, к закрытой). Иногда вместо медных экранов применяют короткозамкнутые медные витки (кольца), которые надеваются на катушки с таким расчетом, чтобы они перекрывали часть полюсных наконечников. Одно и двухпоточные приборы с экраном обладают сравнительно небольшим вращающим моментом и в настоящее время не применяются. На рис. 2.3.2 приведены принципиальная схема устройства и векторная диаграмма двухпоточного индукционного прибора с бегущим полем. Укрепленный симметрично на оси 2 алюминиевый диск 3 пронизывается двумя смещенными в пространстве потоками Ф1 и Ф2. Если переменные токи I1 и I2, протекающие по обмоткам двух катушек 4 и 5, сдвинуты по фазе на угол y, то из предположения, что сердечники катушек не насыщены, а потери на гистерезис и вихревые токи в них отсутствуют, следует, что и потоки Ф1 и Ф2 будут сдвинуты по фазе на тот же угол y. Потоки Ф1 и Ф2, пронизывая диск, будут индуцировать в нем ЭДС Е1 и Е2, вызывающие в диске токи I'1 и I'2. Электродвижущие силы Е1 и Е2 и совпадающие с ними по фазе токи I'1 и I'2 будут отставать от своих потоков на угол p/2. Результирующий момент слагается из двух моментов: момента М1, возникающего от взаимодействия потока Ф1 с током I'2, и момента М2, создаваемого взаимодействием потока Ф2 с током I'1. Значения моментов, возникающих от взаимодействия между собственными потоками и токами (Ф1 с током I'1 и Ф2 с током I'2), незначительны, а если принять, что диск имеет только активное сопротивление, то они равны нулю (так как угол сдвига между потоком и током, им индуцированным, равен p/2). Подвижная часть приборов, обладающая значительной инерцией, не будет реагировать на изменения мгновенных значений вращающего момента в течение каждого периода переменного тока, и отклонение ее вместе со стрелкой 1, а, следовательно, и показания прибора будут зависеть от среднего значения вращающего момента. Как известно, среднее за период значение вращающего момента МВР от взаимодействия переменного потока Ф с индуцированным им в диске током I пропорционально значениям взаимодействующих потока Ф и тока I, а также косинусу угла g сдвига по фазе между ними, т.е.
Моменты М1 и М2 могут быть определены по следующим формулам:
На основании данных векторной диаграммы, приведенной на рис. 2.3.2, б, эти равенства могут быть представлены в следующем виде:
Противоположные знаки моментов М1 и М2 указывают на то, что один контур тока (I'1) втягивается во взаимодействующее с ним поле (Ф2), а другой (I'2) выталкивается из взаимодействующего с ним поля (Ф1). Оба момента совпадают по направлению и поворачивают диск в одну и туже сторону, что подтверждается проверкой по правилу левой руки с учетом сдвига фаз между потоками и токами. Поэтому результирующий момент, действующий на диск, равен
Вращающий момент индукционных приборов пропорционален произведению магнитных потоков, пронизывающих контур, синусу угла сдвига между ними и зависит от частоты тока. Из последней формулы следует, что для создания вращающего момента необходимо иметь не менее двух переменных потоков (или двух составляющих одного потока), сдвинутых по фазе и смещенных в пространстве. В случае совпадения потоков по фазе y = 0 и siny = 0 вращающий момент равен нулю. Максимальный вращающий момент будет при наибольших значениях магнитных потоков и сдвига фаз между ними в ¼ периода (y = 90° и siny = 1). При ненасыщенных сердечниках потоки Ф1 и Ф2 прямо пропорциональны токам I1 и I2, протекающим по обмоткам катушек 4 и 5 (рис. 2.3.2) и, следовательно, значение результирующего момента равно МВР = k f I1 I2 sin y. Противодействующий вращению подвижной части момент МПР может быть создан пружиной (при использовании в качестве ваттметра), и в этом случае он будет пропорционален углу закручивания a: МПР = DКР a. Для момента равновесия МВР = МПР или k f I1 I2 sin y = DКР a, откуда угол поворота подвижной части прибора равен
т.е. пропорционален произведению токов, проходящих через катушки (либо пронизывающих диск потоков), синусу угла сдвига между ними и зависит от частоты тока. К числу достоинств индукционных приборов следует отнести большой вращающий момент (до 5 г·см), малое влияние внешних магнитных полей, стойкость к перегрузкам (подвижная часть приборов не требует подвода тока и выполняется весьма прочной), надежность в работе. Изменение температуры окружающей среды вызывает изменение активного сопротивления диска, что в некоторой степени влияет на показания приборов. В отличие от приборов переменного тока других систем индукционные приборы могут применяться в сетях с одной определенной частотой: на приборах обычно указывается номинальная частота измеряемой величины. Даже небольшое изменение частоты, как в сторону ее увеличения, так и в сторону уменьшения приводит к большим погрешностям измерений. В связи с этим амперметры и вольтметры индукционной системы не получили широкого распространения. Индукционные измерительные механизмы используются преимущественно в счетчиках электрической энергии для цепей переменного тока промышленной частоты. Вибрационная система. Измерение частоты резонансным (вибрационным) частотомером основано на возникновении явления резонанса гибких стальных пластин, вибрирующих под влиянием переменного магнитного потока. Применяют две конструкции измерительных механизмов частотомеров – с непосредственным и косвенным возбуждением.
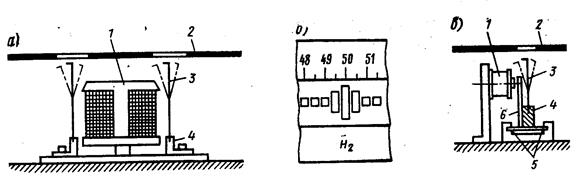
Измерительный механизм частотомера с непосредственным возбуждением (рис. 2.3.3, а) имеет электромагнит 1, обмотка которого включается в контролируемую сеть подобно вольтметру. В поле электромагнита находятся два ряда гибких стальных пластин 3, закрепленных в основаниях 4. Прибор имеет лицевую панель 2, в окнах которой видны отогнутые края пластин, окрашенные в белый цвет. Вдоль отверстий лицевой панели нанесены деления шкалы с интервалом в 0, 5 Гц, обычно соответствующим разности частот собственных колебаний двух соседних пластин. Под влиянием переменного поля электромагнита, вызванного током, частота которого измеряется, пластины частотомера в момент похождения тока через амплитудное значение притягиваются к электромагниту и удаляются от него при каждом нулевом значении тока. С наибольшей амплитудой колеблется та пластина, частота собственных колебаний которой равна удвоенному значению измеряемой частоты. Отогнутый конец этой пластины виде в окне шкалы, как прямоугольник, и указывает на шкале значение частоты (рис. 2.3.3, б). У частотомера с косвенным возбуждением (рис. 2.3.3, в) электромагнит 1 притягивает якорь 6, к которому через основание 4 прикреплен один ряд гибких стальных пластин 3. Якорь и пластины прикреплены к эластичной опоре 5. При включении электромагнита в контролируемую цепь пластины начинают колебаться с удвоенной частотой. Резонансные частотомеры выполняются на диапазоны частот 45 – 55 и 450 – 550 Гц. Их точность соответствует классам 1, 0 и 1, 5.
Электростатическая система. Электростатическими называются приборы, вращающий момент которых создается в результате действия сил электрического поля, возникающих между разноименно заряженными проводниками – электродами измерительного механизма. Указанный способ создания вращающего момента принципиально отличает электростатические приборы от всех приборов непосредственной оценки, у которых вращающий момент возникает в результате взаимодействия магнитного поля измерительного механизма с током. Электростатический измерительный механизм представляет собой конденсатор той или иной конструкции, емкость которого изменяется при перемещении его подвижной части, вызванном подключением к электродам прибора нагрузки, напряжение которой измеряется. Величина перемещения связана определенной зависимостью со значением напряжения. Электрическая емкость конденсатора, как известно, прямо пропорциональна абсолютной диэлектрической проницаемости диэлектрика, разделяющего электроды, и активной площади S электродов, т.е. площади нормальной проекции подвижного электрода на неподвижный, обратно пропорциональна расстоянию между электродами d. В зависимости от способа изменения емкости измерительные механизмы разделяются по конструкции на два вида. На рис. 2.3.4, а представлен механизм, емкость которого изменяется под воздействием сил электрического поля в результате изменения d при практически неизменной активной площади S. Электроды 7 и 5 жестко прикреплены к деталям из изоляционного материала; они представляют собой неподвижную часть измерительного механизма. Электрод 6 прикреплен к планке 4 эластичными металлическими лентами; он является основной деталью подвижной части. При измерении постоянного напряжения U пластины 7 и 6 заряжаются одноименными по знаку зарядами, а пластина 5 – зарядами противоположного знака. Под действием сил электрического поля пластина 6 отталкивается от пластины 7 и притягивается к пластине 5. Перемещение пластины 6 вправо вызывает линейное перемещение прикрепленной к ней тяги 2, а, следовательно, и поворот оси 3 со стрелкой 1 на некоторый угол. Противодействующий момент у измерительных механизмов такой конструкции создается силой веса пластины 6 при отклонении ее от вертикального положения. У измерительного механизма на рис. 2.3.4, б емкость изменяется вследствие изменения активной площади S при неизменной d. При подключении напряжения неподвижные пластины 8 и 9 заряжаются одноименными зарядами, а пластины 10 подвижной части – зарядами противоположного знака. Под действием сил электрического поля пластины 10 поворачиваются так, чтобы активная площадь увеличивалась, т.е. на рис. 2.3.4, б по часовой стрелке. Часто подвижная часть таких измерительных механизмов закрепляется на растяжках, а у более чувствительных приборов – на подвесе. Тогда указателем служит луч, отраженный от зеркала, закрепленного на растяжке или подвесе. противодействующий момент создается силами упругости спиральной пружины, растяжек или подвеса. Определим вращающий момент М электростатического измерительного механизма в цепи постоянного тока на основании уравнения Но Из выведенных уравнений очевидно, что на основе электростатического измерительного механизма может быть выполнен вольтметр, непосредственно измеряющий напряжение постоянного или переменного тока без предварительного преобразования этой величины. Из двух конструкций измерительного механизма более распространена конструкция, приведенная на рис. 2.3.4, б. Шкала электростатического вольтметра неравномерна, так как угол a пропорционален квадрату напряжения, однако она может быть существенно линеаризована. Это достигается выполнением электродов 3 (рис. 2.3.4, б) такой формы, чтобы множитель dС / da в формуле угла поворота при увеличении a уменьшался. Электростатический вольтметр для создания вращающего момента не нуждается в потреблении тока от объекта измерения. Однако ввиду наличия емкости и некоторой проводимости изоляции измерительного механизма прибор в цепи переменного тока потребляет незначительный емкостный ток и крайне малый ток утечки изоляции (при измерении постоянного напряжения – только ток утечки). Входное сопротивление электростатических вольтметров очень велико – оно достигает 1010 Ом, а емкость мала – измеряется десятками пикофарад. Очень малое потребление тока из контролируемой цепи является одним из существенных преимуществ электростатических вольтметров. Другое преимущество – широкий частотный диапазон применения, измеряемый десятками мегагерц. Недостатком электростатических измерительных механизмов являются малый (меньший, чем у всех рассмотренных механизмов) вращающий момент и, как следствие этого, малая чувствительность. Они нечувствительны к внешним магнитным полям, но чувствительны к электрическим. Для защиты от них измерительные механизмы помещают в электростатические экраны – замкнутые поверхности из электропроводящих металлов, например из фольги, или в металлические корпуса, которые обычно заземляют. Температурные погрешности рассматриваемых приборов возникают ввиду зависимости упругих свойств пружин, растяжек или подвесов от температуры. Они не превышают 0, 2 % диапазона измерения. Частотная погрешность электростатических приборов, а также погрешность, зависящая от формы кривой измеряемого напряжения, малы. Это позволяет использовать приборы в широком диапазоне частоты измеряемого сигнала, достигающем десятков мегагерц (в частности в радиотехнических целях) при точности измерения, соответствующей классам 0, 5; 1, 0; 1, 5. Выпускаются переносные и щитовые одно- и многопредельные электростатические приборы. Основная область применения переносных приборов – экспериментальные, исследовательские работы, требующие высокой точности измерения напряжения, тока, выполняемого как в мощных, так и в маломощных цепях в диапазоне напряжений от 10 В до 300 кВ с верхним пределом частоты до десятков мегагерц. Щитовые приборы применяют главным образом в стационарных электроэнергетических установках высокого напряжения, в частности постоянного тока. Популярное:
|
Последнее изменение этой страницы: 2016-03-26; Просмотров: 1801; Нарушение авторского права страницы

 .
. ;
;  .
. ;
;  .
.
 . Результирующий момент направлен в сторону от опережающего по фазе потока (в данном случае Ф1) к отстающему. При неизменном сопротивлении диска и синусоидальном характере изменения потоков с частотой f токи равны:
. Результирующий момент направлен в сторону от опережающего по фазе потока (в данном случае Ф1) к отстающему. При неизменном сопротивлении диска и синусоидальном характере изменения потоков с частотой f токи равны:  ;
; 
 . Тогда выражение для результирующего момента примет следующий вид:
. Тогда выражение для результирующего момента примет следующий вид:  .
. ,
, 

 . Энергия измерительного механизма в данном случае есть энергия электрического поля конденсатора, образованного электродами этого механизма, т.е.
. Энергия измерительного механизма в данном случае есть энергия электрического поля конденсатора, образованного электродами этого механизма, т.е.  , тогда
, тогда  . Так как противодействующий момент МПР = Wa (W – удельный противодействующий момент, зависящий только от свойств упругого элемента), то уравнение шкалы электростатического прибора в цепи постоянного тока
. Так как противодействующий момент МПР = Wa (W – удельный противодействующий момент, зависящий только от свойств упругого элемента), то уравнение шкалы электростатического прибора в цепи постоянного тока  . Из формулы ясно, что знак угла отклонения a не зависит от полярности измеряемого напряжения, следовательно, электростатические приборы пригодны для измерения в цепях переменного тока. В этом случае мгновенный вращающий момент
. Из формулы ясно, что знак угла отклонения a не зависит от полярности измеряемого напряжения, следовательно, электростатические приборы пригодны для измерения в цепях переменного тока. В этом случае мгновенный вращающий момент  , где u – мгновенное значение переменного напряжения. За период Т изменения напряжения подвижная часть ввиду ее инерционности не сможет существенно изменить своего положения и отклонение определяется средним значением вращающего момента:
, где u – мгновенное значение переменного напряжения. За период Т изменения напряжения подвижная часть ввиду ее инерционности не сможет существенно изменить своего положения и отклонение определяется средним значением вращающего момента:  .
. , где U – действующее значение измеряемого напряжения. Выражение вращающего момента
, где U – действующее значение измеряемого напряжения. Выражение вращающего момента  соответствует формуле вращающего момента для постоянного тока, следовательно, уравнение шкалы такого механизма в цепи переменного тока тождественно при условии замены постоянного напряжения действующим значением измеряемого переменного напряжения.
соответствует формуле вращающего момента для постоянного тока, следовательно, уравнение шкалы такого механизма в цепи переменного тока тождественно при условии замены постоянного напряжения действующим значением измеряемого переменного напряжения.