|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ УПРАВЛЕНИЯ
Для комплексной автоматизации производственных процессов необходимо создание самонастраивающихся систем автоматического управления, способных оптимизировать рабочие процессы. Основные задачи самонастраивающихся систем управления: а) оптимизация режимов обработки на станках при изменяющихся условиях протекания технологического процесса; б) оптимизация маршрутов обработки при многономенклатурной обработке путем управления системами рабочих машин, транспортирующими устройствами, межоперационными заделами; в) оптимизация производственных процессов путем выбора режимов обработки, последовательности запуска изделий, маршрутов обработки и т. д. Принципы самонастройки получили широкое распространение в металлорежущих станках с программным управлением и внед- ряются в системах управления деревообрабатывающими станками с числовым управлением. Самонастраивающиеся системы делятся на поисковые (экстремальные) и беспоисковые (аналитические). Системы экстремального управления осуществляют автоматический поиск оптимального управляющего воздействия, которое обеспечивает экстремум показателя качества процесса, представляющего функцию переменных состояния системы. Значение и направление отклонений от экстремума предварительно не изменяются и должны быть установлены в процессе работы системы. Системы экстремального управления выполняют две функции: поиск экстремума и слежение за ним. В беспоисковых (аналитических) самонастраивающихся системах (СНС) определение значений параметров управляющего устройства и выбор его структуры происходят на основе аналитического определения условий, обеспечивающих заданное качество управления без применения специальных поисковых сигналов. Процессы определения и реализации критерия I0 в беспоисковых СНС представляют собой отыскание модели эталона, по которой настраивается реальная система. При построении адаптивной системы управления приводом подачи станка используют принцип зависимости подачи от мощности резания, которая изменяется стохастически в довольно значительных пределах. Наиболее простой, обеспечивающей оптимальные режимы резания, является самонастраивающаяся система с эталонной моделью. Рассмотрим синтез СНС с эталонной моделью и параметрической настройкой с помощью функций Ляпунова на примере системы второго порядка, представляющей собой упрощенный вариант управления приводом подачи в функции мощности резания. Предположим, что основная система управления мощностью резания на четырехстороннем строгальном станке и эталонная модель описываются уравнениями
где k — переменный во времени коэффициент объекта; kc — перестраиваемый коэффициент усиления системы; kM — коэффициент усиления модели; х — входной сигнал; ai = bi — параметры объекта и модели. Необходимо найти алгоритм настройки коэффициента усиления kc из условия устойчивости процессов в системе. Вычитая из (96) (97) и введя обозначение
составим уравнение ошибки
или
где Выберем функцию Ляпунова в виде квадратичной положительно-определенной формы фазовых координат и разности коэффициентов усиления: V =
Рис. 127. Самонастраивающаяся система: а — структурная схема; б — управление вертикально-фрезерным станком где Выразим из (98) вторую производную ошибки и подставим ее в (99): Из полученного выражения следует, что обеспечение неположительности производной функции Ляпунова, т. е. устойчивость процесса настройки, достигается при выполнении условия Из последнего неравенства следует, что 2 Структурная схема СНС в соответствии с алгоритмом настройки показана на рис. 127, а. Таким образом, используя аналитические методы синтеза для конкретных целей можно спроектировать самонастраивающуюся систему. Самонастраивающаяся (адаптивная) система управления вертикально-фрезерным станком АДФ (разработка ЭНИИМС) с цифровым программным управлением представлена на рис. 127, б. Устройство адаптивного управления состоит из блока измерения параметров силы резания Fx и Fy и их записи, блока коррекции координатных перемещений х и у, блока оптимизации режимов резания. В блоке коррекции сигналы, пропорциональные составляющим деформации фрезы, по координатным осям Адаптивная система стабилизации мощности резания состоит из системы ЧПУ, которая включает в себя систему автоматического регулирования (САР) мощности резания (рис. 128, а), САР состоит из выпрямителя VD1, магнитного усилителя МУ, двигателя лентопротяжного механизма М, датчика мощности Dн, состоящего из трансформаторов тока Т1 и напряжения Т2. Сигнал датчика мощности уравновешивается на холостом ходу током смещения в обмотке Нелинейный элемент R6 воспроизводит функциональную зависимость сигнала датчика от подачи Рz = f (s). Сигнал с нелинейного элемента R6 подается на обмотку управления § 62. МИКРОПРОЦЕССОРЫ И МИКРОЭВМ В СИСТЕМАХ УПРАВЛЕНИЯ Микропроцессор —■ это устройство, выполненное в ьиде одной или нескольких больших интегральных схем (БИС). Микропроцессор представляет собой полупроводниковый прибор, состоящий из одной или нескольких программно-управляемых БИС и выполняющий функции автоматической обработки цифровой информации. Миниатюрные размеры, незначительная масса, малое потребление энергии, экономичность и надежность в работе обусловили возможность введения микропроцессоров в электронные схемы измерительных приборов, средств управления и других устройств. В зависимости от функциональных возможностей микропроцессоры делятся на универсальные и специализированные. Универсальным микропроцессорам присущи все особенности центрального процессора. Они служат основой микроЭВМ
Рис. 128. Принципиальная (а) и структурная (б) схемы адаптивной системы стабилизации мощности резания и используются для решения широкого круга задач в системах управления, измерительных приборах и т. д. Специализированные микропроцессоры рассчитаны на узкое применение, решение конкретной задачи и оптимизированы по определенному параметру. Совокупность специально разработанных микропроцессорных и интегральных схем, которые совместимы по своим конструктивно-технологическим данным и могут быть собраны в единое целое, образуют микропроцессорный комплект. МикроЭВМ представляет собой конструктивно законченное вычислительное устройство, построенное на основе микропроцессорного комплекта БИС или модулей, имеющее свой источник питания, пульт управления, узлы ввода-вывода информации, свое программное обеспечение. Свойства их могут быть описаны основными характеристиками, определяющими выбор микропроцессоров: 1) вид микропроцессора (универсальный или специализированный, однокристальный или многокристальный); 2) технология изготовления: р-канальная МОП (р-МОП) n-канальная МОП, (n-МОП) и т. д.; 3) разрядность (4; 8; 16; 32)—длина информационного слова; 4) емкость адресуемой памяти; 5) принцип управления: программное управление с «жесткой» логикой, микропрограммное управление (хранимая в памяти логика); 6) быстродействие. Продолжительность выполнения одной операции или числа операций «регистр-регистр» в секунду; 7) потребляемая мощность; 8) питающее напряжение (число уровней, номиналы); 9) конструктивные данные (габарит, число выводов); 10) условия эксплуатации (интервал рабочих температур, относительная влажность воздуха и т. д.); 11) надежность, 12) стоимость. Архитектура микропроцессора определяет принцип внутренней организации, общую структуру конкретную логическую структуру отдельных устройств, совокупность команд и систему взаимодействия между аппаратной частью и программой обработки информации, выполненную на базе микропроцессора. Архитектура микропроцессора имеет много общего с архитектурами процессоров ЭВМ. Множество выпускаемых промышленностью универсальных микропроцессоров можно разделить по конструктивному признаку на однокристальные и многокристальные микропроцессоры. Первые имеют фиксированную разрядность слова (длину) и определенную систему команд, вторые — наращиваемую разрядность слова и микропрограммное управление, позволяющее достичь гибкости в его применении, повысить производительность ЭВМ, выполняемых на таких микропроцессорах, и т. п. Рассмотрим структуру однокристального восьмиразрядного микропроцессора. В состав микропроцессора (рис. 129) входит а р и ф -метическо-логическое устройство, управляющее уст-, ройство и блок внутренних регистров. Это устройство (АЛУ) служит ядром микропроцессора и выполняет по командам несколько простейших операций: сложение, вычитание, логическое сложение (ИЛИ), логическое умножение (И), сложение по модулю 2. Регистром называют электронную схему для временного хранения двоичной информации (машинного слова). Регистры, служащие для ввода, хранения и вывода инфор- мации, называют накопительными. Сдвигающие регистры дополнительно выполняют операцию сдвига двоичного числа влево, вправо или в обоих направлениях.
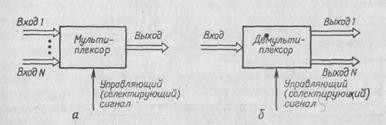
Рис. 129. Структура однокристального восьмиразрядного микропроцессора Устройство управления (УУ) управляет работой АЛУ и внутренних регистров в процессе выполнения команды. Согласно коду операции оно формирует внутренние сигналы управления блоками микропроцессора. Блок внутренних регистров служит внутренней памятью микропроцессора для временного хранения данных и команд. Обычно этот блок содержит регистры общего назначения и специальные регистры. Регистры общего назначения (РОН), число которых может изменяться от 4 до 64, определяют вычислительные возможности микропроцессора, они предназначены для хранения данных, подлежащих обработке. Все РОН доступны программисту, который рассматривает их как сверхоперативное запоминающее устройство. Регистр-аккумулятор предназначен для временного хранения данных, подлежащих обработке, или промежуточного результата арифметических и логических операций, производимых АЛУ. Очень часто ввод и вывод информации в микропроцессоре идет через аккумулятор. Буферный регистр сдвига — специальный регистр для приема и хранения адресной части исполняемой команды. Буферный регистр данных предназначен для временного хранения выбранного из памяти слова перед выдачей его на внешнюю шину данных. Счетчик команд содержит адрес ячейки памяти, в которой помещены байты выполняемой команды. Регистр команд принимает и хранит код очередной команды, адрес которой находится в счетчике команд. Регистр стека. Стек в микропроцессорах — это набор регистров, хранящих адреса (команды возврата, команды заполнения состояния внутренних регистров). Этот набор организован так, что слово адреса или данных выбирается по принципу: «вошедший последним — выходит первым». При записи в стек очередного слова все находящиеся в нем слова смещаются на один регистр вниз, при выборке слова из стека — вверх. Стек может выполняться во внутреннем и внешнем запоминающих устройствах. Указатель стека (регистр) служит для хранения адреса последней занятой ячейки стека. Регистр признаков представляет собой набор триггеров, называемых флажками, которые имеют два состояния — 0 или 1. Предназначены для информации состояния процессора, содержания регистра и т. д. Связь между регистрами осуществляет внутренняя шина данных, т. е. группа линий передачи информации, объединенных общим функциональным признаком. В микропроцессорной системе используют шины данных, шины адресов и шины управления. Шина данных работает в режиме двунаправленной передачи. Это требует мультиплексного режима обмена данных между микропроцессором и внешней памятью. Мультиплексором называют устройство, которое выбирает данные от одного, двух и более вводимых информационных каналов и подает эти данные на свой выход (рис. 130, а). Мультиплексоры входят в состав микропроцессора, а также выпускаются в виде отдельных БИС и представляют собой совокупность логических элементов И—ИЛИ, управляемых распределителем импульсов. Противоположную задачу решает демультиплексор, показанный на рис. 130, б. Обработка данных. Используя рассмотренное назначение узлов и структурную схему микропроцессора (см. рис. 129, а), ознакомимся с процедурой обработки данных. Структурная схема отражает организацию 8-разрядного однокристального микропроцессора (типа КР580ИК80А). Будем полагать, что обработка данных заключается в сложении двух операндов, каждый из которых представляет собой 8-разрядное двоичное число, т. е. б а й т. Все арифметические и логические операции выполняет 8-разрядное АЛУ. Для одно-
Рис. 130. Структурные схемы мультиплексора (а) и демультиплексора (б) адресной организации микропроцессора (микроЭВМ) характерно, что один из операндов, участвующих в обработке, всегда находится в аккумуляторе. На первый вход АЛУ получает байт из 8-разрядного аккумулятора, а на второй вход поступает байт из 8-разрядного промежуточного регистра. Результат сложения двух байтов передается с выхода АЛУ на внутреннюю шину данных в аккумулятор. Регистры РОН расположены попарно, т. е. В и С, D и Е, Н и L, что дает возможность проводить обработку двухбайтовых слов, и доступны программисту. Регистры W и Z используют для кратковременного хранения данных во время выполнения команд, они недоступны программисту. Обмен данными с РОН (считывание и запись информации) осуществляется через мультиплексор, причем требуемый регистр выбирается с помощью селектора регистров по сигналам УУ. Обмен, информацией между регистрами и другими блоками производится через внутреннюю шину данных, передача команд и данных разделены во времени. Связь с внешней шиной данных осуществляет буферный регистр данных. Микропроцессор — это программно-управляющее устройство. Процедура обработки данных определяется программой, т. е. совокупностью команд, которые делятся на две части: код операции и адрес. Код указывает на вид операции над данными, подлежащими обработке. Адрес указывает место, где расположены эти данные. Дешифратор кода операции дешифрирует содержимое регистра команд, определяет характер операции и адреса операндов. Эта информация передается в УУ, которое вырабатывает управляющие сигналы блоком микропроцессора, участвующим в выпол- нении данной команды. Только после завершения процедуры считывания команд и адресов начинается обработка. Микропроцессорные системы (микроЭВМ) представляют собой совокупность взаимодействующих БИС микропроцессорного комплекта, т. е. вычислительную или управляющую систему с микро-
процессором в качестве узла обработки информации (рис. 131). Система содержит ряд узлов, требующих пояснения. Генератор тактовых сигналов дает последовательность прямоугольных импульсов, с помощью которых обеспечивается управление событиями (командами) во времени. Постоянное запоминающее устройство (ПЗУ) — устройство, в котором хранится программа (иногда константы), составленная заранее изготовителем в соответствии с требованием пользователя. Программа жестко «зашита» в запоминающем устройстве и не может быть стерта. Программируемое постоянное запоминающее устройство (ППЗУ) отличается от ПЗУ тем, что пользователь может самостоятельно запрограммировать ПЗУ и ввести ее с помощью специального программатора только 1 раз. Репрограммируемое постоянное запоминающее уст Оперативное запоминающее устройство (ОЗУ) служит памятью данных, подлежащих обработке в результате вычислений, а в некоторых микропроцессорных системах — также программ, которые часто меняются. Данное устройство позволяет при необходимости стереть информацию, а на ее место записать новую. При исчезновении напряжения питания информация, содержащаяся в ОЗУ, исчезает (стирается). Интерфейс — это устройство сопряжения, которое, используя электрические, механические и программные средства, соединяет модули системы между собой и с периферийными устройствами. В микропроцессорных системах применяют специальные универсальные интерфейсные БИС для сопряжения периферийных устройств с системой. При сложных периферийных устройствах берут усложненный интерфейс, называемый периферийным программируемым адаптером. Особенность структуры микропроцессорной системы — магистральная организация связей между входящими в ее состав модулями. Она осуществляется с помощью трех шин: данных, адреса, управления. Достоинством шинной структуры является возможность подключения к микропроцессорной системе новых модулей (ОЗУ, ПЗУ). Нормальное функционирование микропроцессорной системы невозможно без четкого взаимодействия ее составных частей, координации их работы, синхронизации. Основополагающую роль в организации управления событиями во времени играют тактовые импульсы, поступающие от генератора на выводы Ф1 и Ф2 микропроцессора (рис. 131, б). Будем полагать, что в данной микропроцессорной системе тактирование осуществляется с помощью двух идентичных последовательностей, сдвинутых на полпериода. Микропроцессорная система функционирует синхронно с появлением тактовых сигналов. Простейшее действие — состояние, которое занимает один период сигнала — тактовый интервал (такт), 3—5 тактовых сигналов составляют машинный цикл, требуемый для одного обращения к памяти или устройству ввода-вывода. Циклом команды называют интервал времени необходимый для выборки из памяти команды и ее исполнения. Он состоит из 1—5 машинных циклов, что определяет длительность процедуры исполнения команды. Управляющее устройство микропроцессорной системы реализует функции управления, синхронизации, смену событий в требуемой последовательности, согласуя их с сигналами тактового генератора. В течение цикла команды делятся на две фазы: выборка (считывание) и исполнительная фаза, когда формируются сигналы и их последовательность, необходимая для выполнения команды. Все фазы управления требуют некоторого времени, которое составляет часть машинного цикла. По ходу работы микропроцессорной системы иногда появляется «запрос на обслуживание внешних устройств», что программой (ПЗУ) не предусмотрено. В этих случаях микропроцессор, получив запрос на шины управления, прерывает работу по программе и выполняет программу обработки внешнего условия. Такой режим называется прерыванием, которое может быть простым векторным, приоритетным. Таким образом, обработка информации микропроцессорной системой производится по программе, которая представляет собой совокупность, последовательность команд, направляющих работу устройства управления. По функциональному назначению все множество команд можно разбить на группы: команды операций, пересылки данных, управления, ввода-вывода, обращения к подпрограммам и т. д. Они носят типовой характер, как по своему функциональному назначению, так по обозначениям. Например, команды арифметических операций — АДД (сложить) I и В Т ACT (вычесть), команды пересылки данных — МО Е (переслать), ОАД (загрузить) и т. д. Подробно обозначения команд изложены в литературе по вычислительной технике. Микропроцессорная система (МП и микроЭВМ), состоящая из микропроцессора, источника питания, модулей памяти, интерфейса и устройства ввода-вывода представляет собой аппаратурную часть системы обработки, которая для возможности обработки информации дополняется программной частью, обеспечивающей функционирование микроЭВМ. Различают системное программное обеспечение, не зависящее от конкретного применения (поставляет изготовитель микроЭВМ) и программное обеспечение пользователя, разрабатываемое им для решения конкретных задач. Постановка задач для решения на микроЭВМ состоит из этапов: математической постановки задачи, разработки алгоритма решения, представления алгоритма в виде структурной схемы, программирования, отладки программы, решения задачи. Составление алгоритма это не только первый, но и очень важный этап решения задачи. Алгоритм содержит точное предписание о выполнении в определенном порядке элементарных операций с целью решения задачи. Процесс создания алгоритма решения называют алгоритмизацией решения. Запись алгоритма с помощью формализованной системы знаков, принятой для описания процедур решения задач на ЭВМ, называют программой, а знакомые системы — языками программирования. В зависимости от уровня языка, т. е. степени детализации шагов при выполнении программы, различают машинный язык, язык ассемблера и языки высокого уровня. Машинный язык характеризует высокая степень детализации шагов. Это единственный язык, который «понимает» микропроцессор. Язык — это система команд в двоичных кодах, или си- стема инструкции. Для программиста язык неудобен, так как представляет собой последовательность нулей и единиц, составление программы требует много времени, возможны ошибки, трудность развития ранее написанных программ, сложность отладки. Язык ассемблера — символическое изображение машинного языка. Каждая команда обозначается символом, представляющим собой сокращенную форму полной записи наименования данной команды на английском языке (табл. 9). 9. СИМВОЛЬНОЕ ОБОЗНАЧЕНИЕ КОМАНД
Для перевода программы, составленной на определенном языке программирования, в машинные коды применяют языковые трансляторы. Процесс трансляции выполняется с помощью ЭВМ, и программист получает распечатку программы (листинг). Язык ассемблера — наиболее распространенный язык программирования, позволяющий эффективно использовать особенности микропроцессора. Но этот язык ориентирован на конкретную микроЭВМ. Таким образом, язык ассемблера относится к машинно-ориентированным языкам программирования и требует от специалиста, пишущего программу, знания архитектуры и устройства данной микропроцессорной системы. Языки программирования высокого уровня позволяют упростить и ускорить составление программ, так как они являются машинно-независимыми языками, что позволяет использовать программы для разных ЭВМ. Различают процедурно-ориентированные и проблемно-ориентированные языки, которые ориентированы на классы однотипных задач. К языкам высокого уровня относят: АЛГОЛ — алгоритмический язык, ориентированный на решение задач численного анализа; ФОРТРАН — язык программирования, разработанный специально для решения научных и инженерных задач; БЕЙСИК — наиболее широко распространенный диалоговый язык, т. е. язык взаимодействия человека с машиной, сравнительно простой в употреблении; ПЛ/I и ПЛ/М — языки для программирования широкого круга научно-технических и информационных задач. Кроме перечисленных, используют и другие языки высокого уровня. Для ввода программ, написанных на языке высокого уровня, в микропроцессорную систему (микроЭВМ) применяют трансляторы. Таким образом, программное обеспечение — это совокупность программ различного назначения. Ввод информации в микроЭВМ осуществляют с помощью перфолент, кассетного магнитофона, клавиатуры. Микропроцессоры применяют для переработки информации (в качестве устройства числового программного управления (ЧПУ), для решения логических задач (в качестве программируемого контролера), для управления следящими приводами, в измерительных приборах и т. д. Область применения микропроцессоров непрерывно расширяется и одной из подобных сфер является адаптивное управление оборудованием или процессами.
Рассмотрим общую структуру связей системы адаптивного уп-равления с применением микроЭВМ (рис. 132). Для оценки точ-ности используют контрольно-измерительное устройство, измеряющее детали в нескольких точках. Ведущую роль в цикле адаптивного управления выполняет микроЭВМ. По команде от устройства ЧПУ «конец программы» микроЭВМ приступает к управлению перемещением детали на контрольно-измерительную позицию и по командам микроЭВМ выдаются запросы на измерение в отдельных точках. Результаты измерений поступают в память микроЭВМ. Визуальная информация в отклонениях позволяет оператору выбрать рациональные кадры управляющей программы для автоматического внесения коррекций. Эти кадры из ЧПУ передаются в ЭВМ, редактируются и возвращаются в буферную память устройства ЧПУ. Это позволяет реализовать адаптацию системы управления по точности. МикроЭВМ параллельно управляет перегрузкой оборудования. МикроЭВМ позволяет в автоматических системах управления реализовать все известные принципы регулирования: по отклонению, по возмущению, комбинированный. Они дают возможность получить логические алгоритмы, заданные алгоритмы управления в соответствии с характеристиками объекта управления и поступающими сигналами. ЭВМ может входить в состав системы автоматического управления и представлять одно или несколько звеньев системы. Это опре-
деляет необходимость описания характеристик микроЭВМ в такой форме, которая пригодна для проведения расчетов системы с ЭВМ методами и средствами теории автоматического управления. ЭВМ можно представить (рис. 133, а) в виде эквивалентной схемы дискретного элемента системы автоматического управления с дискретной передаточной функцией: Рис. 133. Схемы микроЭВМ: a — эквивалентная дискретного элемента; б—е — структурные включения ЭВМ в контурах САУ МикроЭВМ может выполнять в системах автоматического управления функции задающего (рис. 133, б), сравнивающего (рис. 133, д), корректирующего с параллельным (рис. 133, е) или последовательным включением (рис. 133, в) устройств. Применение микроЭВМ для реализации указанных устройств рационально при значительных объемах вычислений. Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1514; Нарушение авторского права страницы




 = kM— kckK
= kM— kckK 2 + bо
2 + bо 




 х и
х и  2 с помощью резистора R3. При этом скорость протягивания магнитной ленты максимальна.
2 с помощью резистора R3. При этом скорость протягивания магнитной ленты максимальна.