|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные характеристики систем автоматической регулировки усиления.
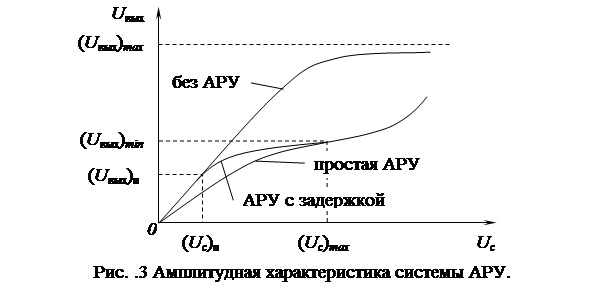
Амплитудные характеристики АРУ или зависимости уровня выходного напряжения УПЧ от величины сигнала на его входе Uвых= f (Uc) приведены на рис. 3. В УПЧ без АРУ имеется линейная зависимость между Uвыхи Uc . При значениях Uc > (Uc)нас линейная зависимость нарушается и наблюдается перегрузка усилителя, которая приводит к появлению искажений сигнала. В простой АРУ при увеличении Uс коэффициент усиления УПЧ начинает уменьшаться и перегрузка усилителя не возникает.
В системе АРУ с задержкой линейность амплитудной характеристики повышается, причем степень снижения коэффициента усиления УПЧ (наклон амплитудной характеристики) в диапазоне [(Uс)п, (Uc)max] будет определяться коэффициентом усиления в петле обратной связи. При (Uс)п > (Uc)max стабилизирующее действие АРУ ослабляется из-за перегрузки в цепи самой АРУ.
Регулировочная характеристика определяет зависимость коэффициента усиления УПЧ от величины управляющего напряжения ku = f (Up). Примерный вид этой характеристики в логарифмическом масштабе (ku(дБ) = 20lgku)изображен на рис. 4. Коэффициент усиления УПЧ максимален ku = (ku)max при Up=0. По регулировочной характеристике можно определить величину (Up)max, при которой ku = (ku)min Отношение (ku)max /(ku)min = g называется коэффициентом регулирования.
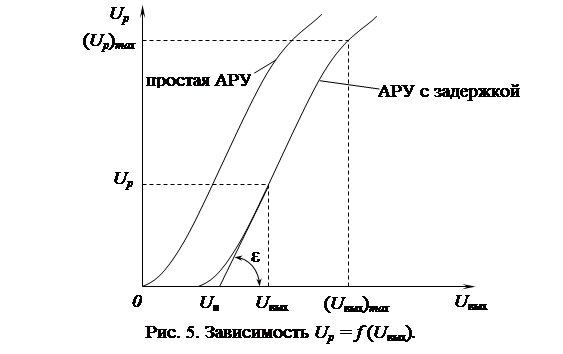
Значение Up, в свою очередь, определяется уровнем сигнала на выходе УПЧ. Зависимости уровня регулирующего напряжения от величины Uвых для 2-х типов АРУ приведены на рис. 5. В системе АРУ с задержкой регулирующее напряжение появляется при Uвых > Uп. При больших значениях Uвых из-за перегрузки АРУ зависимости Up = f(Uвых) существенно искажаются. Считая зависимость Up = f (Uвых) близкой к линейной в области значений Uвых < (Uвых)max, получим выражение для коэффициента усиления в петле обратной связи системы АРУ. Имеем: (ku)АРУ =(Up)max/((Uвых)max – (Uвых)min)= (Up)max/(Uвых)min·1/(b -1). (4) Из уравнения (6.4) следует, что невозможно получить “идеальную” систему АРУ, для которой b=(Uвых)min/(Uвых)max=1. В реальных условиях система АРУ приближается к " идеальной" при больших значениях коэффициента усиления (ku)АРУ в петле обратной связи АРУ.
Анализ работы системы АРУ в динамическом режиме. В динамическом режиме, когда амплитуда входного сигнала изменяется скачкообразно, изменение коэффициента усиления УПЧ с помощью системы АРУ происходит с некоторой задержкой во времени, обусловленной наличием в АРУ инерционных звеньев. Полагая, что инерционным звеном является ФНЧ (RC-фильтр первого порядка) в петле обратной связи, можно записать дифференциальное уравнение, связывающее амплитуду напряжения на выходе УПЧ Uвыхи напряжение на выходе фильтра: RфСф duвых(t)/dt + (1+SpUc)Uвых = (ku)max Uc, (5) где Sp - крутизна регулировочной характеристики в рабочей точке. Решение уравнения имеет вид: uвых(t) = (ku)max Uc / (1+m ) [1+m exp (-t / tАРУ)] (6) где m = (ku)АРУ Sp Uc, tАРУ = Rф Сф / (1+m), а Uc определено для момента времени t = 0. Постоянная времени tАРУ определяет скорость установления амплитуды выходного напряжения. Из (6) следует, что процесс установления выходного напряжения протекает тем быстрее, чем большевеличина m. Установившееся значение Uвых можно найти из (6) при значении параметра t , стремящегося к бесконечности: (Uвых)уст = (ku)max Uc / (1+m) (7) При использовании в качестве инерционного звена системы АРУ фильтра низкой частоты более высокого порядка, напряжение uвых(t)может иметь колебательный характер. Лабораторная работа. Система АРУ, находясь под воздействием выходного напряжения (система АРУ с обратным регулированием) изменяет коэффициент усиления с некоторым запаздыванием, обусловленным наличием инерционных звеньев. Это приводит к искажениям огибающей входного АМ сигнала, вызываемым системой АРУ. Однако результирующие искажения сигнала при наличии системы АРУ оказываются значительно меньшими, чем при ее отсутствии, так как в последнем случае амплитудная модуляция сигнала может быть значительно искажена за счет перегрузки приемно-усилительного тракта УПОС. Целью лабораторной работы является экспериментальное исследование процесса автоматической регулировки усиления в УПЧ, а именно: · определение амплитудных характеристик различных систем АРУ с обратным регулированием (простой АРУ и АРУ с задержкой и усилением); · определение регулировочных характеристик при различных коэффициентах усиления в петле обратной связи; · определение коэффициентов регулирования при различных коэффициентах усиления в петле обратной связи; · определение переходных характеристик системы АРУ в динамическом режиме. Лабораторная установка предназначена для экспериментальных исследований процесса автоматической регулировки усиления в УПЧ при использовании АРУ с обратным регулированием. На установке измеряются: · амплитудные характеристики различных систем АРУ: простой АРУ и АРУ с задержкой и усилением, · регулировочные характеристики для различных коэффициентов усиления в петле обратной связи, · формы регулирующего напряжения при наличии скачка амплитуды входного сигнала для различных порядков фильтра низкой частоты в петле обратной связи.
Установка может использоваться в автономном режиме и режиме программного управления от ЭВМ. Вид лицевой панели лабораторной установки приведен на рис. 6.6. На левом верхнем поле изображена структурная схема установки. На нижнем поле расположена панель ручного управления с переключателями режимов работы. На правом поле измерения и индикации расположен цифробуквенный дисплей с отображением пунктов работы и результатов измерений исследуемых параметров системы АРУ. Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1529; Нарушение авторского права страницы