|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Система, её состав и структура
Определение системы и свойство целостности Существуют и широко применяются различные определения и понятия системы. В буквальном переводе с греческого это слово означает состав, соединение составленное из частей. В качестве основного пример следующее определение: Под системой понимается объективное единство закономерно-связанных друг с другом предметов, явлений, а также знаний о природе и обществе. Существуют различные аспекты понятий системы, в их числе теоретико-познавательные методологические, научно-исследовательские, проектный, инженерный и т.д. Рассмотрим ряд символических определений понятий системы (S) Def. 1. S – есть нечто целое вида S = H(1, 0) (1) Где символы H(1, 0) означают факт существования и целостности. Двоичный код символизирует наличие или отсутствие этих качеств.
Def. 2. Система есть организованное множество вида S = (ОРГ, M) (2) Где ОРГ – оператор организации, М – множество.
Def. 3. Система есть множество вещей {m}, свойств{n}, отношений {v} S = (m, n, v)
Def.4.Система есть множество элементов (E), образующих структуру (St)и обеспечивающее определенное поведение (BE) в условиях окружающей среды (Е) S=(E, St, BE, E) (3) Def.5.Система есть множество входов (Х), выходов Y. Состояние S. Характеризуемых функцией переходов (ДЕЛЬТА) и функцией выходов (ламбда) S=(X, Y, s, дельта, ламбда) (4) Примечание: существуют и другие символические определения адаптированные к предметным областям и оперирующие такими понятиями, как «генетическое начало», «модели», «самообучение», «планы», «внешние и внутренние ресурсы». Далее в качестве рабочего выбрано следующее определение: Система — совокупность элементов и связи между ними, обладающее определенной целостностью (эмерджентный). Элемент — под элементом понимается простейшая, неделимая часть системы. Примечание. Элемент — предел членения системы, определяемая целями поставленными перед конкретной задачей. При изменении целей может потребоваться более детальная декомпозиция, или — наоборот.
Лекция 3 14.03.16
Система и внешняя среда, взаимодействие и ограничения Раздел заимствован из дисциплины ТОАУ, подобного вида заимствования типичны для УСС, а также для других интегрированных курсов. При этом осуществляется непростое заимствование, а выполняется детализация, обусловленная предметной областью. Под объектом управления (ОУ) – понимается та часть окружающего мира, состояние которой нас интересует, и на которую мы можем воздействовать целенаправленно, т.е. управлять. На рисунке 1.1 приведена упрощенная схема ОУ
Рис. 1.1 - К понятию ОУ Здесь среда понимается в широком смысле, т.е. окружающая среда вообще. Х – вход в объект, т.е. воздействие со стороны окружающей среды на ОУ (внешнее воздействие). У – выход. Состояние объекта, обусловленное как действием Х, так и внутренними свойствами объекта. Пример автомобиль как ОУ. Здесь вход Х – состояние дороги, освещенность, состояние атмосферы и т.д. У – состояние автомобиля, т.е. скорость, направление движения, показания тахометра, температура двигателя и т.д. (самостоятельно привести примеры ОУ). ВАЖНО. Из рассмотренного и им подобных примеров следует, что Х и У представляют собой многомерные векторы: Х = {х1, х2, х3, …, хn} Y = {y1, y2, y3, …, ym} Совершенно очевидно, что Х и У связанны между собой через свойство ОУ, т.е. У зависит, как от Х, так и внутренних свойств ОУ. В целях общности эту связь принято обозначать У = F0(X) (1.1) Если связь статическая, то F0 называется функцией, в случае динамической связи (изменения по времени) F0 называется оператором. Далее в целях общности F называется оператором. ВАЖНО. Возможны две качественно различные ситуации: 1) F0 известно, тогда для определения состояния У достаточно воспользоваться формулой (1.1) 2) F0 неизвестное, проблема состоит в нахождении F0, т.к. управление возможно только если известно F0. ВАЖНО. В приложениях F0 отличается значительным разнообразием, в тех случаях, когда теоретические определение F0 затруднено, применяются эмпирические зависимости (накопление опытных данных). Пример курсы вождения автомобилей, летные училища, учреждения занимающиеся подготовкой операторов транспортных средств, под F0 понимается комплекс действий оператора, который при заданной ситуации Х, обеспечивают получение требуемых значений У (состояний объектов), т.е. в данном случае F0 выражается в комплексе конкретных действий, а не в применении математических формул. В тоже время необходимо отметить, что при переходе беспилотных транспортным средствам, оператор F0 должен быть задан в виде математических моделей. Особую значимость приобретает адекватность математических моделей. В противном случае неизбежны аварийные ситуации.
Лекция 4 28.03.16
Введем понятие субъект управления далее упрощено – субъект. В соответствии с определением управление представляет собой процесс целенаправленного воздействия на объект, а это в свою очередь означает, что существует такой элемент управления, который во-первых ставит цель, а во-вторых добивается достижения этих целей. Под целью понимается определение требуемого состояния системы или её поведения. Совершенно очевидно, что эти задачи ставит и решает человек (группа людей, определяемая масштабами задачи). В итоге приходим к понятию субъект управления (далее субъект). Субъект это тот, кому нужно управление. Уточним рисунок 1.1 с учетом понятия субъекта.
Рисунок – 1.2 к понятию «субъект управления»
Стрелками направленными к субъекту, обозначено и то обстоятельство, что субъект наблюдает (измеряет) как за входом (Х), так и за выходом (У). При этом возможны 2 ситуации, а именно: 1) У полностью соответствует поставленной цели. В этом случае необходимость в управляющем воздействии отсутствует. 2) У – состояние не соответствует поставленной цели, в этом случае необходимо воздействие для приведения У к нудному состоянию, что означает управление.
ВАЖНО. Из приведенных данных следуют основные принципы управления. При полном благополучии субъекта, т.е. при удовлетворении объектом всех потребностей субъектом управление не нужно, оно требуется только тогда, когда субъект не удовлетворён ситуацией, сложившейся с объектом. Далее будем обозначать цель через Z. Возможны 2 качественно различных ситуаций, а именно: 1) Y = Z – частный случай 2) Между Y и Z существует сложная зависимость, обозначим её Z = Ψ (Y) 1.2
Простые и сложные системы
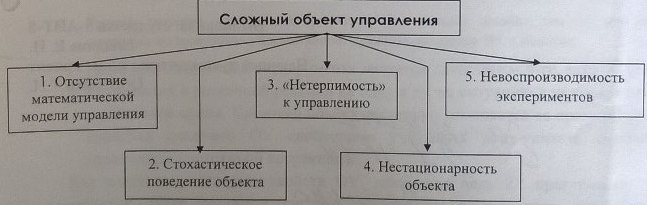
При создании СУ возникают 2 основные ситуации к ОУ: 1) Объект простой 2) Объект сложный Особо отметим, что четкая грань между ними отсутствует (условность понятий). Кроме того отсутствует строгое определение понятия «сложный объект». Важно то обстоятельство, что при изменении Z* возможен переход простого объекта из категории «простой» в категорию» сложный» и наоборот. Пример 1: – человек. Задача 1: Z1* - испытание бронежилета. Пример 2: Z2* – crush – тест автомобиля. Принципиальное отличие примеров состоит в том, что в первом случае можно обойтись без математической модели, а во втором – модель обязательна (сложный робот – манекен). В настоящее время получил распространение следующий подход к определению сложного объекта управления. Его основу составляют 5 основных позиций (рис. 1.3).
Рисунок – 1.3 К понятию «Сложный объект управления»
Если все 5 позиций выполняются, то объект безусловно относится к сложным. Однако, если не все позиции выполняются имеются основания отнесения объекта к категории «сложный»
ВАЖНО. Как следствие сложного объекта управления идеальная цель Z* практически не достигается. Пока создается система управления, а для этого необходим временной интервал, сложный ОУ изменяет свои свойства, в следствие этого возникает ситуация Z! = Z*. Основным способом разрешения этого противоречия это экстраполяция.
Модель «Черного ящика»
Модель состава системы Как следует из определения указанного в глоссарии система состоит из взаимосвязанных частей компонентов. Как результаты декомпозиции (членение системы на компоненты) получаем модель состава системы она может иметь вид списка, таблицы, схемы и отображает состав компонентов, образующих систему. К числу основных компонентов относится подсистема и её элементы. ВАЖНО. Элементы – это неделимые, в данной задаче, части системы (предел членения). Подсистемы состоят из более чем одного элемента и в свою очередь расчленяются на подсистемы более низкого уровня.
В иерархии компонентов каждая подсистема может рассматриваться как система более низкого уровня. Сама исследуемая система является частью надсистемы, находящейся во внешней среде по отношению к рассматриваемой системе. Пример модели состава системы, составленной применительно к процедурам обработки речи в базовом стандарте GSM (от названия группы Groupe Spé cial Mobile, позже переименован в Global System for Mobile Communications).
Рисунок
1.6
…. Вообще между 2 и более объектами может быть более 200 видов отношений. Для практических исследований наиболее важны такие отношения, как потоковые и функциональные связи. Каждый компонент в составе системы свое назначение. В искусственных системах назначение компонентов определенно человеком. Свойство компонента исполнять свое назначение называется функций по формулировке назначения и функции (глагол) совпадает. Например, назначение – преобразование, функция – преобразовать. Исполнение компонентом своей функции дает определённый результат вне этого компонента. В другом компоненте или в выше стояще й подсистемы. Например, функции ракетоносителя (РН) – вывести КА на орбиту, а её результат – движение КА по орбите. Другой пример, функция сердаца – обеспечивать непрерывное движение крови в системе кровообращения, а функция системы кровообращения – обеспечивать кислородом всех клетки организма Таким образом, функция – это внешнее проявление свойств компонентов в системе. Совокупность компонентов и функциональных связей между ними образуют функциональную структуру системы. Функциональные потоковые структуры дополняют друг друга. При решении различных прикладных задач можно использовать только одну из них или одновременно обе. Функция определяется природой своего носителя – компонента. Вместе с тем функция компонента осуществляется в условиях взаимодействия компонентов и определяется структурными и коммуникативными связями. Поэтому изменение связи её компонентов, т.е. в структуре системы вызывают соответствующие изменения функции, как самих компонентов так и системы в целом. Так одна и та же БЦВМ может исполнять различные функции в БКУ, в зависимости от связей с другими компонентами БКУ. Иерархии компонентов системы соответствуют иерархия их функций: функция каждого компонента подчинена функции компонентов более высокого уровня иерархии. На верхнем уровне этой иерархии находятся функции системы. Последняя не совпадает ни с одной из функций компонентов (свойство целостности). Функции системы проявляются во внешней среде как целевой выход системы, как результат её функционирования, как реализация цели системы. Носителем функции является её структура
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1044; Нарушение авторского права страницы