|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОПД.Ф.07 «Системы управления технологическими процессамиСтр 1 из 4Следующая ⇒
Методические указания к лабораторным работам Часть 3 ОПД.Ф.07 «Системы управления технологическими процессами И информационные технологии»
Направление подготовки дипломированного специалиста Технология продовольственных продуктов Специального назначения и общественного питания
Специальность Технология продуктов общественного питания
Уфа 2011 УДК 681.7 (07) ББК 32.96 (Я7) Я 55
Оглавление
ЛАБОРАТОРНАЯ РАБОТА № 6 ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ И ПРОГРАММИРОВАНИЯ ПРОМЫШЛЕННЫХ МИКРОПРОЦЕССОРНЫХ КОНТРОЛЛЕРОВ
Цель работы
Целью работы является: -изучение принципов построения, законов регулирования и состава микропроцессорных систем регулирования технологических параметров; -исследование функциональной схемы и структуры цифровой САР технологических процессов на основе семейства контрольно-измерительных и регулирующих приборов «ОВЕН».
Теоретическая часть
Назначение Программируемый измеритель-регулятор фирмы «ОВЕН» типа МПР51-Щ4 предназначен для управления многоступенчатыми температурно-влажностными режимами технологических процессов при производстве мясных и колбасных изделий, в хлебопекарной промышленности, в инкубаторах, при сушке макарон, изготовлении железобетонных конструкций, сушке древесины, в климатических камерах и пр. по заданной пользователем программе.
Прибор МПР51-Щ4 позволяет осуществлять следующие функции: -регулировать температуру по двум независимым каналам (газовой, жидкой и твердотельной среды); -обеспечивать режим так называемой «дельта-варки», когда нагревание или охлаждение газовой среды происходит при постоянной разности температур в камере и внутри продукта; -при обрыве или коротком замыкании в линии, соединяющей прибор с термометрическим датчиком, на индикатор «ПАРАМЕТР» вместо значения измеренной величины выводятся прочерки; наличие прочерков соответствует состоянию, когда управление исполнительными устройствами блокируется. Технические характеристики и условия эксплуатации Основные технические характеристики прибора приведены в таблице1. Таблица 1 Технические характеристики прибора МПР51-Щ4
Условия эксплуатации прибора приведены в таблице 2. Таблица 2 Условия эксплуатации
Устройство и работа прибора 2.3.1 Функциональная схема прибора Функциональная схема прибора приведена на рисунке 1.
Рисунок 1. Функциональная схема контроллера МПР-51Щ4
2.3.2 Входные устройства Функциональная схема содержит: На входные устройства прибора поступают сигналы от датчиков температуры " сухого" термометра Тсух; " влажного" термометра Твлаж; продукта Тпрод и датчиков положения «Задвижка 1» и «Задвижка 2».
2.3.2.1. Измерение температуры Температура измеряется с помощью термопреобразователей сопротивления. Это могут быть медные датчики ТСМ 50М (R0 = 50Ом), ТСМ 100М (R0= 100 Ом) и платиновые датчики ТСП 50П (R0 = 50 Ом), ТСП 100П (R0 = 100 Ом). Работа таких датчиков основана на температурной зависимости электрического сопротивления металлов. Датчик, как правило, выполнен в виде катушки из тонкой медной или платиновой проволоки на каркасе из изоляционного материала, заключенной в защитную гильзу. Термопреобразователи сопротивления характеризуются двумя параметрами: R0 - сопротивление датчика при 0 °С и W100 - отношение сопротивления датчика при 100°С к его сопротивлению при 0°С. В приборах МПР51-Щ4 используется трехпроводная схема подключения термопреобразователей сопротивления. К одному из выводов термосопротивления подсоединяются два провода, а третий подключается к другому выводу. Такая схема при соблюдении условия равенства сопротивления всех трех проводов (если провода одного сечения, то равенства их длины), позволяет скомпенсировать сопротивление соединительных проводов. Термопреобразователи сопротивления могут подключаться к прибору с использованием двухпроводной схемы подключения, но при этом отсутствует компенсация сопротивления соединительных проводов, поэтому будет наблюдаться некоторая зависимость показаний прибора от колебаний температуры проводов и от увеличения протяженности линии связи «датчик-прибор».
2.3.2.2Определение положения задвижки с помощью резистивного
Сопротивление датчика должно находиться в пределах от 100 до 1000 Ом; при больших значениях сопротивления помехоустойчивость прибора будет снижаться. Положение задвижки отображается на индикаторе «ПАРАМЕТР» в процентах: закрытому состоянию задвижки соответствует показание 0 %, открытому- 100 %. Поскольку крайние положения движка переменного резистора датчика положения не всегда соответствуют полному открытию или закрытию задвижки, предусматривается процедура калибровки датчика при полностью закрытом состоянии (min) - 0 % и полностью открытом состоянии (max) - 100 %; показания на индикаторе между этими положениями линейно зависят от сопротивления переменного резистора.
2.3.2.3.Фильтрация входных величин
Для ослабления влияния внешних импульсных помех на качество регулирования в приборе предусмотрена фильтрация результатов измерений входных величин. Фильтрация осуществляется независимо для каждого канала измерения, а также при вычислении влажности. В приборе МРП51-Щ4 используется модель фильтра первого порядка. Для каждого канала измерения в отдельности можно при необходимости вводить свою постоянную времени фильтра, рисунке 2 (программируемые параметры d01, d02, d03, d04, d05, d06. прил. А). При значении программируемого параметра, равном нулю, фильтрации не происходит. При увеличении значения параметра возрастает инерция изменения показаний датчика.
Рисунок 2. Принцип действия фильтра: 1 - измеренное значение параметра; 2 - значение параметра после фильтра; d - постоянная времени фильтра; А - очередное измеренное значение параметра
Действие постоянной времени фильтров становится заметным при ее значениях, превышающих время опроса датчиков (время опроса- примерно 4с при значениях программируемого параметра о04 = 001, 002, 003 и 6 с при о04 = 004, 005 (см. прил.А). ПРИМЕЧАНИЕ. Значения постоянных времени фильтра для " сухого" и " влажного" термометров влияют на индикацию относительной влажности даже при значении параметра о04 = 000.
2.3.2.4 Вычисление влажности и разности температур камеры и продукта
Устройство для вычисления ∆ Т и Ψ кроме измерения трех входных величин Тсух, Твлаж, Тпрод вычисляет разность между Тсухи Тпрод, равную ∆ Т, атакже, используя величины Тсух и Твлаж, вычисляет относительную влажность воздуха Ψ. Прибор вычисляет относительную влажность воздуха по психро-метрическому методу. Для этого используются значения температуры " сухого" и " влажного" (" мокрого" ) термометров. " Сухой" термометр - это обычный термометр, измеряющий температуру газовой среды в камере. " Влажный" термометр - это термометр с увлажненным фитилем (салфеткой, платком, кусочком ткани) на своем чувствительном элементе. Формула, по которой вычисляется влажность, а также устройство " влажного" термометра приведены в прил. А.
2.3.2.5.Коррекция показаний датчиков температуры
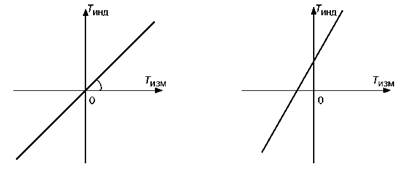
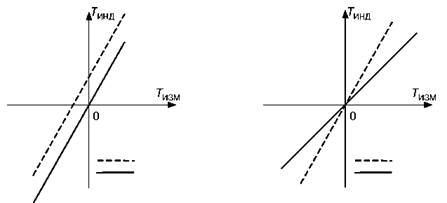
Исправный датчик должен иметь характеристику (зависимость индицируемой прибором температуры Тинд от измеряемой температуры Тизм), изображённую на рисунке 3. Вследствие погрешности изготовления, вызванной погрешностью намотки измерительного резистора, несоответствием материала датчика стандарту, старения датчика, характеристика может изменяться и, в общем случае, может принять вид, показанный на рисунке 4. Для " исправления" характеристики в приборе предусмотрена коррекция показаний датчиков температуры. Для сдвига характеристики в вертикальном направлении (рисунок 5) надо ввести корректирующее значение δ, программируемые параметры «сдвиг характеристики» 1с1 (2с1, 3с1) (см. прил. А).
Рисунок 3. Характеристика исправ-ного датчика Рисунок 4. Характеристика датчика, измененная вследствие погрешностей Если характеристику надо сдвинуть вверх (увеличить индицируемое значение), то задаётся положительный знак поправки (параметры 1с2 (2с2, 3с2) = 000); если - вниз, то отрицательное значение, (параметры 1с2 (2с2, 3с2) = 001), см. прил. А.
Для поворота графика вокруг точки, соответствующей 0° С(рисунок 6), надо ввести корректирующее значение α, программируемые параметры «наклон характеристики» 1с3 (2с3, 3с3)(см. прил. А). Если надо повернуть график по часовой стрелке (уменьшить индицируемое значение), то задаётся отрицательный знак поправки (параметры 1с4 (2с4, 3с4) = 001), если против часовой стрелки (увеличить индицируемое значение), то знак поправки положительный (параметры 1с4, 2с4, 3с4 =000) (см. прил. А). В результате коррекции значение температуры, выводимое на индикатор, будет равно, °С: Тинд =(Тизм +δ )× (1 + α /100%). (1) Необходимо иметь в виду, что δ задаётся в градусах, а α - в процентах от измеренной величины.
2.3.3 Регуляторы
Регулятор - это устройство, осуществляющее регулирование определённой величины, т.е. поддержание этой величины равной уставке или управление изменением этой величины. Регулятор может осуществлять любой из указанных ниже законов регулирования, в зависимости от свойств управляемого объекта: -пропорционально-интегрально-дифференциальный (ПИД) закон; -пропорциональный (П) закон; -пропорционально-интегральный (ПИ) закон; -пропорционально-дифференциальный (ПД) закон; -релейный (Т) закон. В общем случае регуляторы осуществляют регулирование измеряемой величины по ПИД-закону. На выходе регулятора вырабатывается управляющий сигнал Y, действие которого направлено на уменьшение отклонения текущего значения контролируемой величины от заданного. Величина выходного сигнала вычисляется, исходя из рассогласования E, которое равно разности Tуст (заданного значения - уставки) и Tизм (измеренного значения), а также из установленных в приборе значений ПИД-коэффициентов. Величина выходного сигнала может изменяться от 0 до 100% и определяется отношением длительности замыкания выходного реле (длительности выходного управляющего импульса) к периоду следования выходных управляющих импульсов Тсл. Выходной сигнал Y вычисляется по следующей формуле:
где Di - длительность выходного управляющего импульса; Tсл- период следования управляющих импульсов; XР - полоса пропорциональности; Еi - рассогласование, измеренное в i-й момент времени; ∆ Е- разность между текущим Еi и предшествующим Еi-1 измерениями; ∆ tизм - время между этими измерениями; τ Д - постоянная времени дифференцирования; τ и - постоянная времени интегрирования; f(En)- функция ограничения очередного члена интегральной суммы; п - число измерений от начала регулирования до i-го момента времени. Из формулы (1) видно, что при ПИД-регулировании сигнал управления зависит от:
ПИД-закон реализуется с помощью следующих программируемых параметров: -постоянная времени дифференцирования 0 1(.01); -постоянная времени интегрирования 02(.02); -полоса пропорциональности 03(.03); -период следования выходных (управляющих) импульсов регулятора 04(.04); -зона действия интегральной составляющей 05(.05); -ограничение максимальной мощности исполнительного устройства 06(.06); -тип исполнительного устройства на выходе регулятора 07(.07); -зона нечувствительности 08(.08). Параметры регулирования для обоих регуляторов (кроме уставок), см. прил. А, устанавливаются на уровне программирования L2 один раз и действуют одинаково для всех программ и шагов.
2.3.3.2 Полоса пропорциональности
При действии П-закона регулятор выдает импульсы, в которых присутствует только пропорциональная составляющая величины выходного сигнала. Полоса пропорциональности Хр (рисунок 7), как и отклонение E, выражается в единицах контролируемого параметра. Чем шире полоса пропорциональности, тем меньше величина выходного сигнала при одном и том же отклонении. Вне полосы пропорциональности выходной сигнал равен 0 или 100 %.При измененении выходного сигнала выходные управляющие импульсы изменяют свою ширину при постоянном периоде следования (широтно-импульсная модуляция - ШИМ). Если уменьшать полосу пропорциональности, то зона ШИМа также будет уменьшаться. В предельном случае, когда полоса пропорциональности равна нулю, ШИМ осуществляться не будет (частный случай П-закона регулирования - Т-закон (релейный)) (рисунок 8).
Рисунок 7. П-закон регулирования Рисунок 8. Т-закон регулирования (релейный): полоса пропорциональности Хp равна нулю Полоса пропорциональности задается с помощью программируемого параметра 03(.03)(см. прил. А).
2.3.3.3 Постоянная времени интегрирования
При выходе температуры на заданное значение (уставку) (при пропорциональном законе регулирования), она устанавливается около уставки, несколько не доходя до неё (от долей до нескольких градусов). Эта разность будет тем больше, чем больше значение полосы пропорциональности. Для устранения этого вводится параметр «постоянная времени интегрирования», который в приборе описывается программируемым параметром P02 (Р.02), см. прил. А. Чем меньше значение постоянной времени интегрирования, тем быстрее возрастает длительность выходных импульсов регулятора и, следовательно, тем быстрее температура достигает уставки. Чем больше значение постоянной времени интегрирования, тем меньше вклад интегральной составляющей в выходной сигнал (см. формулу (1)). После задания постоянной времени интегрирования происходит переход от П-закона к ПИ-закону регулирования.
2.3.3.4. Зона линейного действия интегральной составляющей
Рассмотрим пример, где регулятор должен поддерживать Туст= 150 °С, а исходная температура равна 20 °С. Тогда в начале нагрева рассогласование Ei = 130°С. При ПИД-регулировании к интегральной сумме (последнее слагаемое в формуле (1)) прибавляется рассогласование после каждого измерения. С ростом температуры каждый последующий член суммы уменьшается, но общая сумма интегральной составляющей сигнала оказывается недопустимо большой при приближении температуры к уставке, что приводит к значительному перерегулированию. Чтобы этого не происходило, вводится ограничение величины очередного слагаемого интегральной суммы при помощи зоны линейного действия интегральной составляющей 2Хи, которая задается программируемым параметром Р05 (Р.05), см. прил. А. Зависимость величины каждого последующего члена интегральной суммы от отклонения показана на рисунке 9. Из рисунка 9 видно, что, чем уже зона линейного действия интегральной составляющей (чем меньше значение программируемого параметра Р05 (Р.05)), тем меньше значение, добавляющееся к интегральной сумме при большом отклонении. Следовательно, при первом выходе на уставку (после первого включения) при меньшем значении параметра 05 (.05)перерегулирование будет меньше. В то же время подтягивание регулируемой величины к уставке (в установившемся режиме) замедляется. Значение функции f(En) определяется так: f(En) = E, при |E| < Хи (см. рисунок 9); f(En) = P05, при |E|> Хи; т.е. в диапазоне значений от E= 0 до E=±Хи f(En)=E, а за пределами диапазона E=±Хи происходит ограничение f(En ).
Рис. 9. Ограничение интегральной составляющей при помощи Хи
2.3.3.5 Постоянная времени дифференцирования
При постоянной времени дифференцирования не равной 0, прибор будет работать в режиме ПИД-регулятора. Чем больше значение постоянной времени дифференцирования, тем быстрее будет реагировать выходной сигнал на изменение входного сигнала. Чем меньше значение постоянной времени дифференцирования, тем меньше вклад дифференциальной составляющей в выходной сигнал (см. формулу (1)). Постоянная времени дифференцирования задается с помощью программируемого параметра Р01 (Р.01) (см. прил.А).
2.3.3.6. Ограничение максимальной мощности
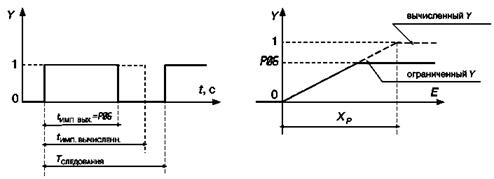
Если мощность исполнительного устройства слишком велика для данного объекта управления, может потребоваться ее ограничение. Ограничение мощности происходит посредством ограничения длительности выходных импульсов (при постоянном периоде их следования). В приборе ограничение мощности осуществляется с помощью программируемого параметра Р06 (P.06) (см. прил. А). Если вычисленная регулятором длительность очередного импульса превышает значение, установленное в параметре Р06 (Р.06), то длительность выходного импульса tимп.вых. будет равна значению, установленному в этом параметре (в процентах от максимальной мощности исполнительного устройства) (рисунки 10, 11).
2.3.3.7 Тип исполнительного устройства
Для правильного формирования выходного сигнала ПИД-регулятора необходимо задать тип исполнительного устройства: нагреватель или холодильник. Нагревателем условно называют устройство, при включении которого увеличивается значение измеряемого параметра. Холодильником называют устройство, при включении которого уменьшается значение измеряемого параметра. Рисунок 10. Ограничение макси-мальной мощности. Временная диаграмма Рисунок 11. Ограничение максимальной мощности. Выходная характеристика Тип исполнительного устройства на выходе 1-го (2-го) регуляторов задается программируемым параметром Р07 (Р.07), см. прил. А. При управлении задвижками учитывается, что двигатель задвижки - это интегрирующее звено, и регулятором производится дополнительное дифференцирование выходного сигнала. В этом случае «постоянная времени дифференцирования» не учитывается, даже если она была ранее установлена. Но «полоса пропорциональности» и «постоянная времени интегрирования» производят то же действие, что и при управлении нагревателем (холодильником).
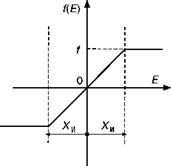
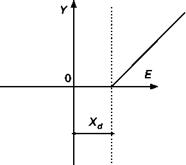
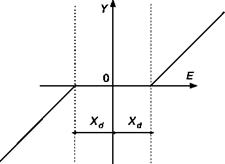
2.3.3.8. Зона нечувствительности Зона нечувствительности - это такая область значений рассогласований входного сигнала Е, в которой считается, что Е=0. За пределами этой зоны регулятор определяет величину отклонения по формуле
где Ер - истинное отклонение; Хd - ширина зоны нечувствительности. Размерность величины зоны нечувствительности та же, что и у входной величины, подаваемой на вход регулятора. Зона нечувствительности для «нагревателя» представлена на рисунке 12, для «нагревателя-холодильника» - на рисунке 13. ПРИМЕЧАНИЯ. 1. При значении Р0З=000полоса пропорциональности регулятора равна нулю (а не бесконечности, как было бы, если строго следовать формуле), и пропорциональная составляющая выходного сигнала обратится в ноль. 2. При Р01(Р.01)= 000 дифференциальная составляющая выходного сигнала обратится в ноль. 3. При Р02(Р.02) = 000 интегральная составляющая выходного сигнала будет равна нулю (а не стремится к бесконечности, как было бы, если строго следовать формуле). Рисунок12. Зона нечувствительности для исполнительного устройства типа «нагреватель» Рисунок 13. Зона нечувствительности для исполнительного устройства типа «нагреватель - холодильник» или «задвижка» Компараторы Компаратор - это устройство, предназначенное для сравнения входной величины с эталонной; при этом компаратор имеет два состояния выходного сигнала: состояние выходного сигнала изменяется, если входная величина пересекает пороговый уровень (эталон). Способы использования компараторов: -для оповещения об аварийных или близких к аварийным ситуациях (поэтому их еще называют компараторами сигнала ТРЕВОГА); -для двухпозиционного регулирования; -для включения (выключения) оборудования при достижении управляющим сигналом установленного уровня или выходе его за установленные пределы. -для включения (выключения) оборудования по истечении заданного времени. Работа каждого из четырех компараторов регулируется следующими программируемыми параметрами: -входная величина компаратора (01); -состояние выхода компаратора (02); -уставки компаратора (03...04); -логика работы компаратора (05); -блокировка срабатывания компаратора до 1-го достижения уставки (06, 07); -блокировка срабатывания компаратора до снятия внешнего воздействия ( 08); -параметры задержки срабатывания компаратора (09, 10).
Программируемые параметры с01..с10(см. прил. А) для каждого компаратора устанавливаются на уровне L1 (см. разд. 4) для каждой программы в целом (отдельно для каждого шага задать уставки и другие параметры компаратора нельзя). Если компаратор не используется, то его выход надо отключить, задав значение параметра с02 =000.
2.3.4.1 Входная величина компаратора На вход компаратора подается одна из пяти измеряемых или вычисляемых входных величин (Tсух, Tпрод, Tвлаж, ∆ T, Ψ ) непосредственно или входной сигнал, поступающий на вход одного из регуляторов (параметр c01).
2.3.4.2 Выход компаратора С помощью программируемого параметра с02(см. прил. А) пользователь определяет, на какое реле будет подаваться выходной сигнал компаратора. На одно и то же реле могут быть поданы выходные сигналы от нескольких компараторов (т.е. может быть объединение их выходов по схеме «ИЛИ»).
2.3.4.3 Уставки компаратора С помощью программируемых параметров с03 и с04 (см. прил. А) задают значения, соответственно, верхней и нижней уставок компаратора, т.е. предельно допустимые для данного технологического процесса значения контролируемой величины. Верхней уставкой автоматически становится уставка с большим значением.
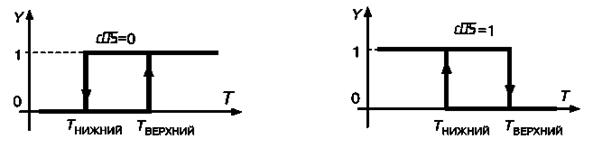
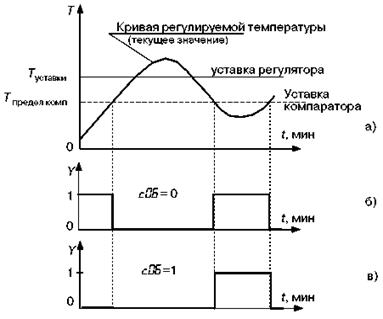
2.3.3.4 Логика работы компаратора Закон, в соответствии с которым будет работать компаратор, устанавливается с помощью программируемого параметра с05(см. прил. А). При с05=000 (рисунок 14) компаратор замыкает свое выходное реле в случае превышения контролируемой величиной установленного значения верхней уставки, размыкает реле при уменьшении выходной величины ниже нижней установки. Этот закон используется, например, при управлении «холодильником»; для сигнализации о превышении допустимой температуры нагрева. При 05=001 (рисунке 15) компаратор замыкает свое выходное реле в случае, когда контролируемая величина становится меньше значения нижней уставки, размыкает реле, когда входная величина превысит верхнюю уставку. Этот закон используется, например, для поддержания температуры при помощи «нагревателя»; для сигнализации об остывании объекта ниже определенной температуры.
Рисунок 14. Компаратор срабатывает по верхней уставке: Y- 1 - выходное реле замкнуто; Y = 0 - выходное реле разомкнуто Рисунок 15. Компаратор срабатывает по нижней уставке: Y = 1 - выходное реле замкнуто; Y = 0 - выходное реле разомкнуто Эти законы используются также для включения оборудования по достижении определенной температуры.
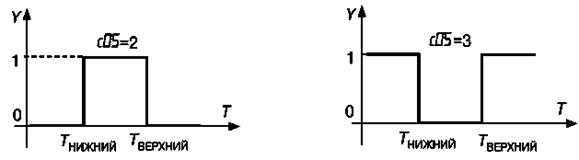
ПРИМЕЧАНИЕ. Если необходимо, чтобы оборудование после включения больше не выключалось, надо установить значение параметра с08=001 (см. прил. А). При с05= 002 (рисунок 16) компаратор используется для сигнализации о достижении контролируемой величиной (например, температурой) установленных пределов. При с05= 003 (рисунок 17) компаратор используется для сигнализации о выходе контролируемой величины за установленные пределы.
2.3.4.5 Блокировка срабатывания компаратора до 1-го достижения уставки В случаях, когда в начале технологического процесса, например, при нагреве, разница между исходной температурой и уставкой намного превосходит установленное значение верхней уставки компаратора, должно произойти аварийное срабатывание компаратора. Чтобы избежать этого, в приборе предусмотрен программируемый параметр с06 (см. прил. А), позволяющий игнорировать первое " ненужное» срабатывание компаратора (рисунок 18), а аналогичная ситуация может возникнуть при переходе от одного шага программы к другому, если уставки этих шагов далеко отстоят друг от друга.
Рисунок 18. Блокировка срабатывания компаратора до 1-го достижения уставки
Блокировать срабатывание компаратора до 1-го достижения уставки можно как в начале программы (с помощью программируемого параметра с06), так и в начале каждого шага программы (с помощью параметра с07).
2.3.4.6 Блокировка срабатывания компаратора до снятия внешнего воздействия Прибор может работать в режиме, когда после первого срабатывания компаратор больше не реагирует на свой входной сигнал и остается в таком положении (когда его выходное реле замкнуто) до окончания программы (до нажатия кнопки С помощью этого параметра возможно фиксировать факт выхода управляемой величины за установленный предел (пределы) в течение одной программы.
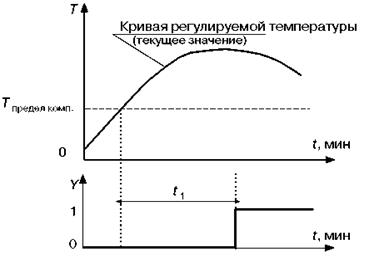
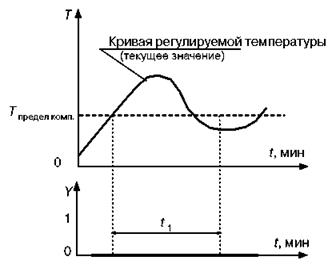
2.3.4.6 Время задержки срабатывания компаратора При выходе управляемой величины за установленные пределы можно задержать во времени момент срабатывания компаратора: если установленное время задержки срабатывания t1 не превышает времени непрерывного нахождения управляемой величины (температуры) выше установленного предела компаратора (рисунок 19), то компаратор срабатывает; - если время нахождения управляемой величины за установленными пределами меньше t1, то компаратор не срабатывает (рисунок 20). Этот режим работы компаратора реализуется путем заданием параметру 09ненулевого значения (см. прил. А).
Рисунок 19. Время задержки срабатывания компаратора: компаратор срабатывает
Рисунок 20. Время задержки срабатывания компаратора: компаратор не срабатывает
2.3.4.6 Время задержки отпускания компаратора Аналогично задается задержка отпускания компаратора: -если время нахождения управляемой величины ниже установленного предела после срабатывания компаратора меньше t2 (установленного времени задержки отпускания компаратора), то отпускания не происходит (рисунок 21). -если больше, то по истечении времени t2 происходит отпускание компаратора (рисунок 22). Этот режим работы компаратора реализуется заданием параметру 10 на ненулевого значения (см. прил. А). .
.
Транзисторные ключи
Восемь транзисторных ключей прибора используются для управления оборудованием на текущем шаге управления программы технолога. При выполнении программы каждый транзисторный ключ может находится в следующих состояниях: - закрыт на протяжении всего шага; - открыт на протяжении шага; - работает в периодическом импульсном режиме на протяжении шага. На каждом шаге режимы работы 1-го по 8-й ключей задаются программируемыми параметрами n01...n08. Существует 14 импульсных режимов работы ключей, задаваемых в параметрах F02...F15(длительность импульса), F.02...F.15 (длительность паузы), см. прил. А. Примечание. Если назначается импульсный режим работы ключа, то шаг начинается с импульса (т.е. с замыкания ключа). Выходные реле На пять выходных реле прибора поступают выходные сигналы: -на первое и второе реле - с первого регулятора; - на третье и четвертое реле - со второго регулятора. Пятое реле «АВАРИЯ» автоматически замыкается при возникновении аварийной ситуации. Реле «АВАРИЯ» может также использоваться для вывода выходного сигнала компараторов. Если регулятор управляет задвижками или одновременно «нагревателем» и «холодильником», то он использует оба «своих» реле. Если регулятор управляет только «нагревателем» или только «холодильником», то он использует одно «свое» реле. При этом первый регулятор использует второе реле, второй регулятор использует четвертое реле. В этом случае первое и третье реле остаются свободными и могут использоваться для вывода на них выходных сигналов с компараторов. Выходной сигнал компаратора в отличие от выходного сигнала регулятора можно направить на любое реле. Реле, на которое назначается выход компаратора, должно быть свободным. В этом случае регулятор должен быть либо отключен, и тогда освобождаются оба его реле, либо регулятор должен управлять исполнительным устройством типа «нагреватель» или «холодильник», и тогда свободно одно его реле. На одно свободное реле можно назначать выходы нескольких компараторов, объединяя выходы этих компараторов по схеме «ИЛИ», при этом реле будет замыкаться от сигнала любого компаратора, выход которого назначен на это реле.
ЗАДАНИЕ Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 494; Нарушение авторского права страницы

 Характеристика
Характеристика








 5 входных устройств (входов); 2 регулятора; 4 компаратора; 6 цифровых фильтров; устройство для вычисления разности температур ∆ Т и относительной влажности Ψ; задатчик программ управления (программ технолога); 8 выходных транзисторных ключей; 5 выходных реле; устройство-сигнализатор об окончании выполнения программы технолога, устройство связи с компьютером, индикаторы.
5 входных устройств (входов); 2 регулятора; 4 компаратора; 6 цифровых фильтров; устройство для вычисления разности температур ∆ Т и относительной влажности Ψ; задатчик программ управления (программ технолога); 8 выходных транзисторных ключей; 5 выходных реле; устройство-сигнализатор об окончании выполнения программы технолога, устройство связи с компьютером, индикаторы.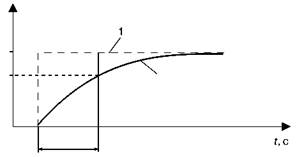


 , (2)
, (2) - пропорциональной составляющей выходного сигнала;
- пропорциональной составляющей выходного сигнала;  - дифференциальной составляющей выходного сигнала;
- дифференциальной составляющей выходного сигнала;  - интегральной составляющей выходного сигнала.
- интегральной составляющей выходного сигнала.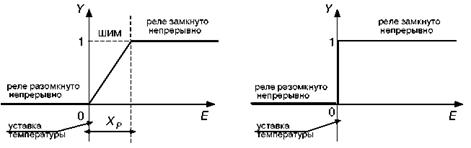

 .
. ). Этот режим работы компаратора реализуется заданием параметру 08 значения «001» (см. прил. А).
). Этот режим работы компаратора реализуется заданием параметру 08 значения «001» (см. прил. А).