|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Лабораторные упражнения и контроль усвоения материала ⇐ ПредыдущаяСтр 2 из 2
В процессе изложения преподавателем общей части темы студенты заполняют лабораторную тетрадь, расставляя номера позиций на конструктивных схемах, производя необходимые расчеты, вычерчивая требуемые графики, отвечая на поставленные вопросы. При этом может быть использован материал, представленный в данных методических указаниях и приведенных ниже библиографических источниках. На специально отведенных занятиях осуществляется практическое знакомство с машинами и механизмами, находящимися на полигоне кафедры «Путь и строительство железных дорог» СамГУПС. Контроль усвоения материала проводится в ходе защиты лабораторной работы.
Библиографический список
1. Автоматизация и механизация работ на транспортном строительстве / Под ред. К.С. Исаева. – М.: Транспорт, 1989. – 264 с. 2. Добронравов С.С., Дронов В.Г. Строительные машины и основы автоматизации. – М.: Высш. шк., 2001. – 575 с. 3. Доценко А.И. Строительные машины и основы автоматизации. – М.: Высш. шк., 1995. – 400 с. 4. Железнодорожное строительство. Технология и механизация / С.П. Першин, М.А. Зензинов, Н.А. Фищуков, Г.Н. Шадрина; Под ред. С.П. Першина. – М.: Транспорт, 1991. – 399 с. 5. Кабанов А.В. Выбор монтажных кранов и подбор технологической оснастки для ведения строительно-монтажных работ. - М.: Маршрут, 2006. – 72 с. 6. Классификация, основные части строительных машин: Методические указания к выполнению лабораторных работ/Составители Т.В. Щенникова, В.В. Калинина, К.С. Пьянова. – Самара: СамГАПС, 2004. – 48 с. 7. Локшин Е.С., Рубайлов А.В. Строительные и дорожные машины. – М.: РИА «Россбизнес», 2004. – 304 с. 8. Строительные машины / Д.П. Волков, Н.И. Алешин, В.Я. Крикун, О.Е. Рынсков; Под ред. Д.П. Волкова. – М.: Высш.шк., 1988. – 319 с. 9. Технология железнодорожного строительства / Э.С. Спиридонов, А.М. Призмазонов, А.Ф. Акуратов, Т.В. Шепитько; Под ред. А.Н. Призмазонова, Э.С. Спиридонова. – М.: Желдориздат, 2002. – 631 с. МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ
Кафедра пути и строительства железных дорог
ГРУЗОЗАХВАТНЫЕ УСТРОЙСТВА Методические указания к выполнению лабораторной работы №11 по дисциплине «Технология, механизация и автоматизация железнодорожного строительства» для студентов специальности 270204 «Строительство железных дорог, путь и путевое хозяйство» очной и заочной форм обучения
Издание второе, исправленное и дополненное
Составители: Т.В.Щенникова В.В. Калинина
Самара
УДК 69.002.5 Грузозахватные устройства: методические указания к выполнению лабораторной работы №11 по дисциплине «Технология, механизация и автоматизация железнодорожного строительства» для студентов специальности 270204 «Строительство железных дорог, путь и путевое хозяйство» очной и заочной форм обучения/Составители Т. В. Щенникова, В. В. Калинина. – 2-е издание, исправленное и дополненное.– Самара: СамГУПС, 2011. – 24 с.
Утверждены на заседании кафедры 22.02.2011, протокол №9. Печатаются по решению редакционно-издательского совета университета.
В методических указаниях даны сведения о назначении и разновидностях грузозахватных устройств и приспособлений, их конструктивных особенностях, мерах, обеспечивающих безопасное ведение монтажных работ. Приведенная информация будет способствовать лучшей подготовке студентов к выполнению лабораторной работы №11 по теме «Грузозахватные устройства» и ее успешной защите.
Составители: Щенникова Татьяна Владимировна Калинина Вера Вениаминовна
Рецензенты: главный специалист отдела пути и станций СПИИ «Желдорпроект Поволжья» Волков Николай Валентинович; зав. кафедрой «Строительные дорожные машины и технология машиностроения» СамГУПС, д.т.н., профессор Самохвалов Владимир Николаевич
Под редакцией составителей Компьютерная верстка:
Подписано в печать Формат 60´ 90 1/16. Бумага писчая, печать оперативная. Усл. п. л. 5. Тираж экз. Заказ №.
ã Самарский государственный университет путей сообщения, 2005, 2011
Введение При возведении различного рода зданий и сооружений приходится выполнять значительные объемы строительно-монтажных работ, составной частью которых являются такелажные и стропальные работы. К такелажным и стропальным работам относятся: строповка строительных конструкций и оборудования; вязка узлов, крепление и сращивание стальных канатов; подъем, перемещение и установка строительных конструкций и оборудования; подвешивание и снятие блоков, талей и полиспастов; закрепление и снятие временных расчалок и оттяжек; сборка, установка, разборка и оснастка грузоподъемных мачт; опробование такелажного и стропального оборудования; подъем и установка строительных конструкций спаренными кранами и многое другое. Жилые и производственные здания и сооружения возводят из изделий заводского изготовления (фундаментных блоков, балок, колонн, ферм, стеновых панелей, плит покрытия и перекрытия). Доставка их к месту строительства неразрывно связана с такелажными и стропальными работами. Так, конструкции стропуют, поднимают, перемещают, устанавливают на транспортные средства и закрепляют на время передвижения. При разгрузке с прибывших конструкций снимают крепления, стропуют, поднимают, перемещают, устанавливают в проектное положение или складируют. При этом применяют грузозахватные устройства в виде гибких стальных канатов, траверс, механических и вакуумных захватов и т.д. В данных методических указаниях приведены сведения о назначении, конструктивных особенностях, методах испытания грузозахватных устройств. Материал предназначен для использования его студентами в ходе выполнения и подготовки к защите лабораторной работы №11 на тему «Грузозахватные устройства», приведенной в «Сборнике лабораторных работ» по дисциплине «Технология, механизация и автоматизация железнодорожного строительства». Лабораторная работа №11 Цель работы: ознакомление с разновидностями грузозахватных устройств, их конструктивными особенностями, мерами, обеспечивающими безопасное ведение монтажных работ. Теоретическая часть
Грузозахватные устройства
Успешное ведение монтажных работ с использованием кранов в значительной мере зависит от надежности, безопасности и удобства в работе грузозахватных (строповочных, такелажных) устройств и приспособлений. В строительстве применяют более 200 их видов. Грузозахватные устройства (рис. 1) включают грузовые (чалочные) крюки с предохранительными замками, карабины, подвески (скобы, серьги) шарнирные, глухие и разъемные (с планками и гайками), различного рода захваты, магнитные плиты, грейферы и т.д. К грузозахватным устройствам относятся также коуш стальной, предохраняющий проволоки каната от перетирания в петле стропа, и строп канатный, наиболее часто применяемый для монтажных работ.
Рис. 1. Грузозахватные устройства: крюки: а – с предохранительной планкой; б – с предохранительной скобой; в – с поворотным козырьком; г – с предохранительной пружиной; скобы: д – шарнирная (серьга); е – глухая; ж – карабин
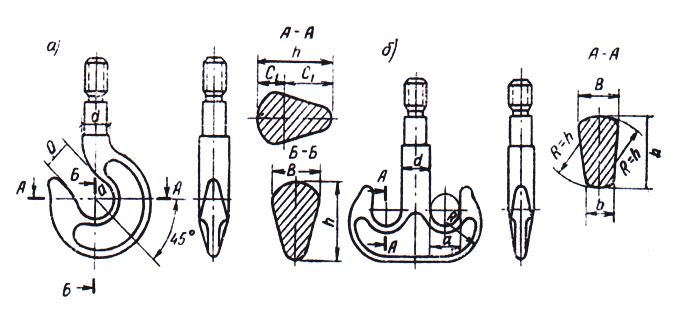
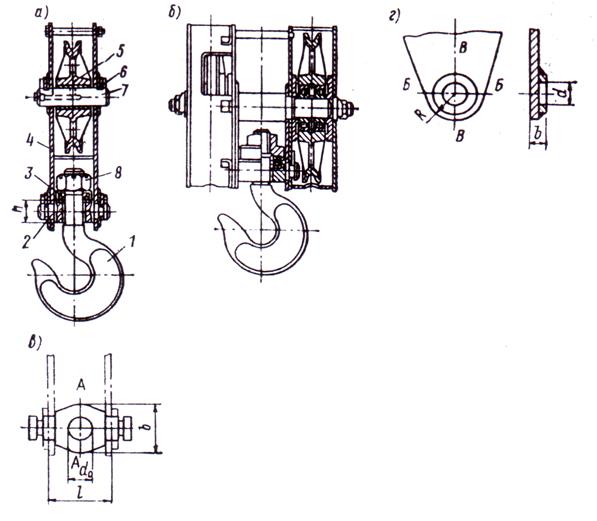
Крюки, крюковые обоймы Наиболее распространенным видом грузозахватных устройств кранов является крюк. Формы и размеры крюков стандартизированы. Изготовляют крюки грузоподъемностью до 75 т штамповкой или ковкой из сталей определенных марок. Крюки изготовляются однорогими и двурогими (рис. 2). Крюки грузоподъемностью от 40 т и выше изготовляют из отдельных пластин листовой стали, набираемых в пачку. Для подъема особо тяжелых грузов применяют вместо крюков грузовые кованые петли или скобы. Крюк разрешается нагружать только в пределах допускаемой для него грузоподъемности. На каждом крюке должно быть клеймо с указанием грузоподъемности, года выпуска и завода-изготовителя. Для предотвращения выпадания съемного устройства, крюки снабжаются предохранительными замками. Соединение грузозахватных крюков с грузоподъемным канатом кранов выполняют с помощью крюковых обойм (рис. 3). Конструкция крюковой обоймы (подвески) зависит от типа полиспаста. При двух- и трехниточном полиспасте крюковая обойма может быть с одним блоком, при четырех-, пятиниточном – с двумя блоками.
Рис. 2. Грузозахватные крюки грузоподъемных кранов: а – однорогий; б – двурогий
Рис. 3. Крюковые обоймы: а – одноблочная; б – двухблочная; в – крюковая траверса; г – проушина щеки для траверсы Одноблочная крюковая обойма изображена на рис. 3, а: крюк 1 свободно входит точеной шейкой в отверстие траверсы 2 и закрепляется в заданном положении гайкой 8, снабженной устройством, предохраняющим от самоотвинчивания. Между гайкой и траверсой установлен шариковый упорный подшипник 3, благодаря чему нагруженный крюк получает возможность легко поворачиваться вокруг вертикальной оси. Траверса 2 своими цапфами входит в отверстия щек обоймы 4 и может поворачиваться в них вокруг своей продольной оси. Канатный блок 5 свободно посажен на ось 7, закрепленную в гнездах щек обоймы пластинами 6. Для уменьшения потерь от трения блок следует устанавливать на подшипниках качения (что предпочтительнее) или скольжения. Наиболее ответственными и нагруженными деталями грузовых обойм (подвесок) являются крюк 1, траверса 2 и ось блоков 7. Траверса 2 грузовой обоймы рассчитывается как балка на двух опорах, нагруженная в середине пролета сосредоточенной нагрузкой Q, равной массе поднимаемого груза и стропующих устройств. Опасным местом является сечение А-А по оси отверстия для шейки крюка (см. рис. 3, в).
Стропы
Стропы применяют для подвешивания грузов к крюкам грузоподъемных кранов. Различают стропы гибкой и жесткой конструкции. Гибкие стропы, изготавливаемые из кусков канатов, бывают универсальными, облегченными и многоветвевыми. Жесткие стропы разделяют на траверсы и захваты. Универсальный строп (рис. 4, а) имеет форму замкнутой петли длиной 8…15 м и применяется для строповки элементов с вязкой узла в обхват. Концы каната стропа соединяются заплеткой на длине 40 диаметров или на 6…7 сжимах. Облегченный строп (рис. 4, б) делают из куска стального каната, снабженного по концам петлями, коушами, крюками или карабинами. Его применяют для строповки элементов с вязкой узла “на себя” (рис. 4, в) или как одноветвевой строп (рис. 4, г), а также в качестве ветвей двух-, четырех- и шестиветвевых стропов или ветвей траверс. Двухветвевой строп предназначен для перемещения балок, крупных блоков и других элементов с двумя монтажными петлями. С помощью многоветвевого стропа стропуют элементы в четырех или шести точках захвата. Четырехветвевой строп – “паук” (рис. 4, д) используют для перемещения плит покрытий, лестничных площадок и других элементов. Самобалансирующие стропы (рис. 4, е) предназначены для кантования, подъема и монтажа панелей перекрытий, подъема панелей стен, лестничных маршей и других конструкций. Панели перекрытий стропуют четырьмя или шестью, стеновые панели – двумя, лестничные марши, площадки и балконные плиты – четырьмя ветвями самобалансирующего стропа. Усилие Р в каждой ветви любого стропа (рис. 4, ж) определяется по формуле
где G – вес поднимаемого груза, Н; m – число ветвей сторпа; α – угол наклона стропа к вертикали, град.
Рис. 4. Стропы из стальных канатов: 1 – коуш; 2 – петля; 3 – крюк; 4 – карабин; 5, 6 – верхняя и нижняя серьги; 7 – облегченный строп с крюком; 8 – стальной канат; 9 – ограничитель; 10 – блок с зажимным устройством
С увеличением угла α возрастает усилие P, поэтому не рекомендуется располагать стропы под углом к вертикали больше чем 450, тем более что при большом угле возникают и значительные горизонтальные усилия, действующие на груз у места присоединения стропов, которые могут его деформировать. Периодически производят испытание стропов. Стропы испытывают в течение 10 минут под нагрузкой на 25% превышающей расчетную. После снятия нагрузки производится внешний осмотр стропов (определяют количество порванных прядей в свивке каната). При необходимости грузоподъемность строп ограничивается, или же они выбраковываются. К стропам подвешивается бирка с указанием даты испытания и грузоподъемности. Ежемесячно производить внешний осмотр строп. Коэффициент запаса прочности стропов
где P – усилие, возникающее в ветвях стропов, Н; Pр – разрывное усилие каната, Н. Коэффициент запаса прочности по разрывному усилию канатов для стропов, огибающих груз, принимается равным 8, для стропов, примыкающих к грузу без огибания – 6. Кольца, крюки и серьги стропов должны иметь запас прочности при расчете на изгиб не менее 1, 25 от предела текучести материала, а при расчете на растяжение – не менее 5. При подвешивании монтируемых элементов к крюку крана стропами из стальных канатов (тросов) вяжут узлы и петли (рис. 5) с таким расчетом, чтобы при подъеме элемента они не ослаблялись, а после установки на место легко снимались (расстроповывались).
Рис. 5. Узлы и петли из канатов: узлы: а – прямой; б – двойной; петли: в – обыкновенная; г – мертвая; д – коуш
Петли могут быть с коушами и без них. Концы канатных узлов и петель закрепляют с помощью сжимов и клиновых зажимов (рис. 6).
Рис. 6. Сжимы канатные: а – с планкой; б –“коренной зуб”; в – расположение сжимов на петле из каната
Когда необходимо устранить влияние горизонтальных сил, действующих на груз, а также для подъема длинномерных грузов применяют стропы с траверсой. Горизонтальные силы Рсж, возникающие у мест присоединения стропов к траверсе, определяются по формуле
Траверсы (жесткие стропы) разнообразных конструкций используют для работы с длинномерными сборными элементами, что позволяет снизить расчетную высоту строповочного устройства, а также уменьшить напряжения, возникающие от изгибающих моментов и сжатия элемента горизонтальной составляющей подъемного усилия при наклонных стропах. Траверсы бывают балочные, решетчатые и пространственной конструкции. Балочные траверсы изготавливают в виде металлических балок из двух швеллеров, соединенных накладками и снабженных по концам блоками с перекинутыми через них стропами. Самобалансирующие траверсы (рис. 7, а) позволяют перевести элемент, например колонну, в процессе подъема из горизонтального в вертикальное положение. Блоки таких траверс могут свободно вращаться, а при необходимости по отрегулированной длине их зажимают вместе со стропами. Балочная траверса для подъема ферм и других конструкций (рис. 7, в, г) позволяет обеспечить равномерное натяжение всех четырех стропов, равномерную передачу нагрузки на точки захвата и значительно уменьшить сжимающие усилия, возникающие в конструкциях при подъеме наклонными стропами.
Рис. 7. Применение траверс для подъема конструкций: а – самобалансирующая для подъема колонн; б –схема подъема колонны; в – траверсы для подъема ферм; г – схема строповки фермы; д – схема полуавтоматического замка; 1 – балансирный блок; 2 – стальной канат; 3 – штыревой захват; 4 – полуавтоматический замок; 5 – запорный штырь; 6 – обойма с пружиной; 7 – канат для расстроповки
Решетчатые траверсы в виде металлических треугольных стальных ферм, снабженных блоками и стропами, применяют для подъема конструкций, например балок и ферм покрытий пролетом 18 м и более. Пространственные траверсы в виде системы из балочных, решетчатых траверс, блоков и облегченных стропов используют для подъема тяжелых длинномерных элементов, например плит покрытий размерами Для подъема криволинейных элементов оболочек (рис. 8), навесных стеновых панелей с незамкнутым контуром, асбестоцементных панелей, крупноразмерных стеклоконструкций и других тонкостенных сборных элементов, для которых не допускается монтажное напряжение, применяются вакуумные траверсы. При этом форма вакуум-присоса должна соответствовать форме и конструкции поднимаемого элемента.
Рис. 8. Вакуум-траверса для захвата криволинейного элемента оболочки: 1 – стропы; 2 – рама траверсы; 3 – вакуум-камера; 4 – поднимаемый элемент; 5 – рукав к вакуум-насосу
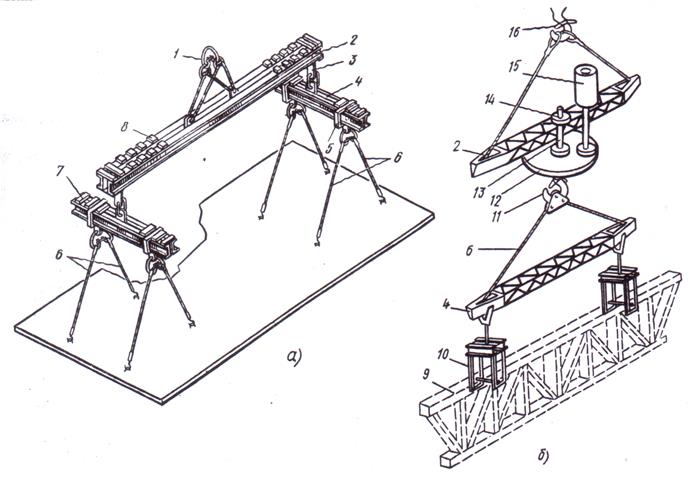
Рис. 9. Траверсы для подъема железобетонных плит большого размера (а) и с механизмом вращения для ориентирования груза (б)
Траверсы для монтажа железобетонных плит большого размера (рис. 9) состоят из нескольких траверс. Основная траверса 2 выполнена из двух швеллеров, соединенных по краям планками. Через систему канатов траверса крепится к разъемной такелажной скобе 1. С помощью перемещающихся подвесок 3 к верхней основной траверсе прикрепляют две дополнительные траверсы 4, расположенные перпендикулярно основной. К дополнительным траверсам с помощью перемещающихся подвесок 5 через стропы 6 крепят поднимаемую плиту. Дополнительные траверсы также состоят из двух швеллеров, по краям соединенных планками 7. С помощью такой траверсы за счет перемещающихся подвесок и упоров поднимают элементы различной формы в пределах грузоподъемности траверсы. На приобъектных складах, где конструкции устанавливают в определенном порядке и направлении, появляется необходимость ориентировать поднимаемый груз или конструкцию в процессе подъема. Поступательное ориентирование может производиться непосредственно башенным краном путем перемещения крана и тележки, передвигающейся по стреле. Вращательное ориентирование на весу выполняют специальным опорно-поворотным устройством или траверсой с механизмом вращения (рис. 9, б). Стропильная ферма 9 при помощи захватных устройств 10 соединена с траверсой 4. Траверса 4, в свою очередь, при помощи стропов 6 закреплена на крюке 11 поворотного устройства. Поворотное устройство состоит из поворотного круга 12, вертикального вала 13, подпятника 14 и механизма вращения 15. Все поворотное устройство закреплено на траверсе 2, которая подвешивается на крюк грузоподъемного механизма 16. Для работы поворотного устройства включают механизм вращения 15, и груз поворачивается в необходимое положение. Захваты предназначены для прикрепления строповочных приспособлений к поднимаемой конструкции. Петлевые захваты – это крюки и карабины (рис. 1), присоединяемые к монтажным петлям конструкции или к универсальным стержневым захватам. Беспетлевые захваты бывают различных типов. Универсальный стержневой захват для подъема панелей перекрытий (рис. 10), а также временного крепления панелей несущих поперечных стен может иметь резьбовую (рис. 11) или клиновую конструкции.
Рис. 10. Подъем панели перекрытия самобалансирующим шестиветвевым стропом: 1 – панель; 2 – универсальный захват; 3 – карабин; 4 – канаты стропов; 5 – блоки; 6 – кольцо для крюка
Резьбовой захват состоит из корпуса 7 с кольцом 4 для подвески на крюк стропа. Нижняя часть корпуса имеет прорезь, внутри которой на оси 8 подвешен сухарь 6 , соединенный с тягой, оканчивающейся рукояткой 3. Для закрепления захвата в панели 5 выводят рукоятку 3 в крайнее верхнее положение. При этом сухарь, поворачиваясь вокруг оси, убирается в корпус, и захват входит в отверстие панели. Затем той же тягой выводят сухарь в горизонтальное положение. Рукояткой 2, зажимную гайку 1, навернутую на резьбовую часть корпуса, затягивают до отказа и упора сухаря в плоскость панели. Высвобождают захват из панели в последовательности, обратной описанной. Грузоподъемность захвата 800 кг.
Рис. 11. Универсальный резьбовой захват
Клиновой захват не имеет зажимной гайки, его закрепляют в панели при помощи клина, вставляемого в отверстие корпуса.
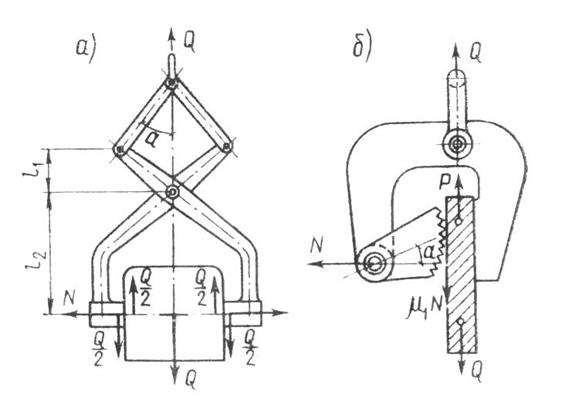
Рис. 12. Захваты для штучных грузов: а – клещевой захват; б – эксцентриковый захват
Клещевой захват (рис. 12, а) позволяет поднимать балки Т-образного сечения, например подкрановые балки массой до 14 т. Усилие N, развиваемое клещевым захватом, нормальное к поверхности захватываемого груза, будет равно
где Для удержания груза необходимо подбирать длины плеч рычагов и угол У эксцентриковых захватов (рис. 12, б)усилие распора N эксцентрика, действующее нормально к поверхности поднимаемого груза G, будет равно
где Сила, удерживающая груз
где
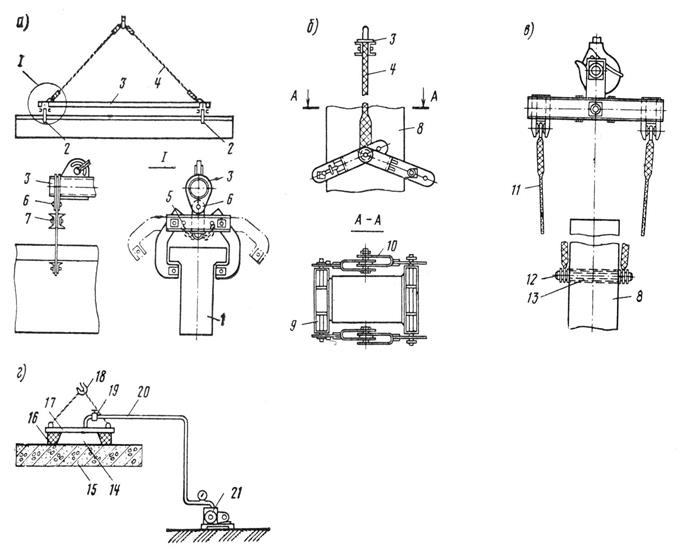
Фрикционный захват (рис. 13, б) зажимает колонну при натяжении стропов и удерживает ее благодаря силам трения. При случайном опирании элемента натяжение стропов ослабевает, поэтому фрикционным захватом пользуются только при подъеме колонн с консолями. Штыревой захват (рис. 13, в) с креплением стропов к штырю, пропущенному через монтажное отверстие в колонне, надежен в работе и обеспечивает вертикальное положение колонны при подъеме. Вакуумный захват (рис. 13, г) позволяет выполнять быструю строповку и расстроповку, безопасный подъем элемента с минимальными монтажными нагрузками, что особенно важно для тонкостенных конструкций. Его применяют для подъема и установки крупноразмерных железобетонных плит перекрытий и элементов тонкосводчатых конструкций. Вакуумный захват не требует монтажных петель, крюков, карабинов и т.д. и позволяет устранить ручные операции по строповке и расстроповке конструкций. При использовании такого рода захватов конструкция удерживается за счет разряжения, создаваемого в вакуум-камере или в вакуум-присосах. Вакуумные захваты состоят их вакуум-камер, рукавов и вакуум-насоса. Наиболее эффективно они могут использоваться в стационарных условиях на предприятиях строительной индустрии. На строительной площадке захват подвешивают к грузовому крюку монтажного крана, а пульт управления устанавливают в кабине крановщика. В зависимости от назначения захваты имеют различные устройства для кантования изделий в процессе подъема, а также могут быть оборудованы одной или несколькими камерами различной формы. При проверочных расчетах следует учитывать, что при разряжении, создаваемом вакуумным насосом, на каждый килограмм массы поднимаемого груза требуется 1, 2 см2 площади присоса. Так, например, двухтонную панель перекрытия можно поднять захватом, имеющим общую площадь камер присоса 2400 см2. При этом усилие сдвига не должно превышать 75% усилия отрыва. Безопасность при подъеме деталей обеспечивают запасом грузоподъемности вакуумного захвата и наличием специальных страхующих приспособлений, исключающих возможность падения поднимаемой детали при случайной остановке вакуумного насоса. Для освобождения захвата открывают вентиль, соединяющий вакуум-полость с атмосферой.
Рис. 13. Некоторые типы захватов: 1 – балка; 2 – захват; 3 – траверса; 4 – строп; 5 – предохранительный штырь; 6 – ось подвески; 7 – ось захвата; 8 – колонна; 9 – фрикционный захват; 10 – шарнир; 11 – строп штыревой; 12 – отверстие с закладной трубой; 13 – штырь; 14 – вакуум-полость; 15 – плита; 16 – герметизирующая прокладка; 17 – площадка; 18 – крюк; 19 – вентиль; 20 – шланг; 21 – вакуум-насос
Мелкоштучные стеновые строительные материалы применяются в строительстве наравне с железобетонными строительными конструкциями. К ним относятся кирпич, стеновые камни, мелкие блоки. Основной способ доставки мелкоштучных стеновых материалов, обеспечивающий комплексную механизацию, пакетный. Он практически исключает тяжелый ручной труд, ликвидирует потери от боя, экономит раствор, сокращает затраты труда. В результате снижается стоимость строительства, уменьшаются потери материалов, повышается качество кладки и культура хранения материалов на складах. При осуществлении перегрузочных работ наряду с ведущим оборудованием используется вспомогательное, включающее в себя поддоны, контейнеры или иные средства пакетирования, а также грузозахватные приспособления. Транспортным пакетом мелкоштучных строительных материалов считается укрупненный груз, сформированный из более мелких материалов. Наиболее употребляемым средством пакетирования глиняного кирпича, стеновых керамических, шлакобетонных и бетонных камней стали деревометаллические поддоны. Для перевозки силикатного кирпича используются одинарные и двойные поддоны. Поддон (рис. 14) включает в себя основание 7, гибкую обвязку 2 и замковое устройство. Последнее выполнено в виде зубчатой рейки 5 и фиксаторов 6. После укладки кирпича на поддон гибкую обвязку из транспортной ленты тросовыми оттяжками цепляют за крюки прижимной рамки 3. Натягиванием рейки за проушины 4 пакет обжимают и грузят в вагон.
Рис. 14. Транспортный поддон: а – расположение пакета кирпича на поддоне; б – вид одинарного пакета; в – вид двойного пакета
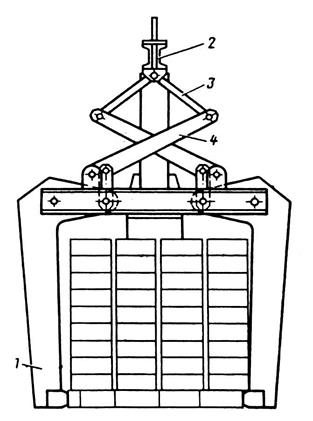
Пакеты глиняного кирпича и стеновых керамических камней грузят и выгружают полуавтоматическими самозатягивающимися захватами (рис. 15).
Рис. 15. Полуавтоматический самозатягивающий захват: а – общий вид; б – рабочее положение Раму-каркас 1 захвата подвешивают стропами к крюку крана посредством вертикальных тяг 3 с распорной трубкой 2 и надевают на пакет кирпича (положение I). Зажимы 6, соединенные промежуточными тягами 5, освобождаясь от фиксатора 4, захватывают пакет кирпича (положение II). Для обеспечения безопасности под пакет автоматически подводят челюсти 8 с опорными толкателями 7. Для освобождения пакета захват устанавливают на подставку. Толкатели раскрывают челюсти. Движением вертикальных тяг разводятся зажимы и фиксируется раскрытое положение фиксатором (положение III). После этого захват поднимают для переноса за следующим пакетом (положение IV). На кирпичном заводе силикатный кирпич грузят с помощью многорычажных клещевых захватов. В частности, широко применяется клещевой двусторонний захват (рис. 16). Он действует по принципу зажатия пакета и снабжен автоматическим устройством фиксации.
Рис. 16. Клещевой двусторонний автоматический захват для силикатного кирпича
Траверса 2 несет управляющие рычаги 3 и 4, служащие для поворота Г-образных рычагов 1. Они поворачиваются в момент размыкания механизма фиксации при подъеме траверсы и зажимают нижними выступами первый (прокладной) ряд. Пакет готов для подъема и переноса. Для механизации погрузки и выгрузки пиломатериалов, сформированных в пакеты, применяют рамные захватные устройства. Самые распространенные из них – с поворотными лапами (рис. 17). Подвешенный на крюк разгрузочного крана рамный захват с поворотными лапами 1 вставляется в зазоры около стенок вагона или между штабелями. Траверса 3, опускаясь, рычагами 2 захвата заводит подхватные лапы 1 в зазор между пакетами. Механизм автоматической фиксации 6 удерживает рабочие органы 1 в нужном положении. После переноса пакета и его штабелирования крановщику достаточно опустить крюк с траверсой. Механизм фиксации, выключаясь, позволяет рычажной системе 2 повернуть подхватные лапы 1 в нейтральное положение, освобождая захват.
Рис. 17. Рамный автоматический захват для пиломатериалов
Для механизации погрузки бревен на подвижной состав все шире применяются тракторные погрузчики с челюстными захватами. Наезд на штабель, управление челюстным устройством для захвата пачки леса, транспортировка и погрузка производятся дистанционно из кабины оператора. Погрузчики имеют гидропривод рабочих движений.
Бадьи, грейферы Для перемещения кранами сыпучих (песок), мелкокусковых (щебень) и тестообразных (бетон, раствор) материалов применяют бадьи. Для ускорения выгрузки материала бадьи делают самоопрокидывающимися или с открывающимся днищем. Самоопрокидывающаяся бадья (рис. 18, а)подвешивается тремя стропами, два из которых соединены с ней наглухо, а один - специальным крючком, удерживающим кольцо бадьи при натянутом стропе и саморасцепляющимся при ослаблении стропа. Установленная на штабель бадья с грузом опрокидывается при натяжении подъемного каната. Бадья для бетонной смеси с открывающимся днищем (рис. 1.18, б) состоит из цилиндрического корпуса 1с нижней частью в виде усеченного конуса 8и подставок 5, на которые бадья может устанавливаться при перевозке. Выпускное отверстие перекрывается шторным затвором, состоящим из сектора 4, которыйшарнирно прикреплен к корпусу бадьи на осях 2, толстой резиновой ленты 6и роликов 7, поддерживающих ленту от провисания и прижимающих ее к горловине бункера. Правый конец ленты прикреплен к горловине бункера, а левый – к сектору затвора. Управление затвором осуществляется при помощи рычага 3. Большого усилия для открывания затвора не требуется в связи с тем, что его днище изолировано от загруженного материала резиновой лентой. Бадья опрокидная для бетонной смеси показана на рис. 1.18, в. Она состоит из корпуса 11, салазок 13, затвора 12, управляемого штурвалом 9, и траверсы 14. Для ускорения выгрузки смеси служит вибратор 10.
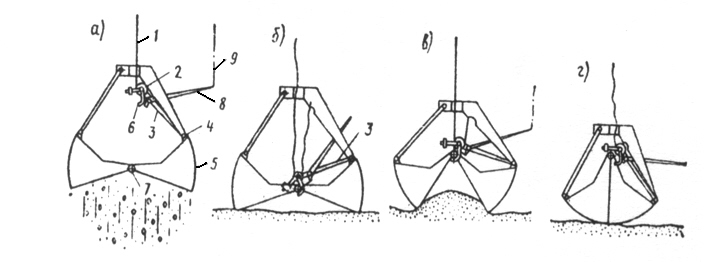
Рис.18. Бадьи: а–опрокидная; б–с открываемым днищем; в – опрокидная (туфелька) для бетонной смеси Для перегрузки сыпучих и мелкокусковых материалов (песок, щебень), а также для экскавации грунта применяют автоматические захваты – грейферы. По числу лопастей различают грейферы двухчелюстные и многочелюстные. Последние применяют для захвата камней и для отрывки скважин круглого сечения. По устройству замыкающего механизма различают грейферы одноканатные, двухканатные и моторные с электро- или гидроприводом. Одноканатные грейферы применяют в качестве грузозахватного устройства, подвешиваемого ккрюку грузоподъемного крана любого типа при перегрузке краном сыпучих и мелкокусковых материалов. Двухканатные грейферы могут применяться только при наличии на машине двухбарабанной лебедки, приспособленной для работы с грейфером, а моторные - на кранах и экскаваторах с электро- и гидроприводом. Двухканатный грейфер (рис. 19) состоит из челюстей 1, соединенных шарнирно с корпусом нижней блочной обоймы 4, и четырех жестких тяг 2, связывающих челюсти с корпусом верхней блочной обоймы 3 или головки. К головке грейфера прикреплен поддерживающий канат (канатный полиспаст) 6 грузоподъемной лебедки 7. Канат 5 обводится по блокам нижней и верхней обойм, образуя замыкающий полиспаст, и присоединяется ко второму барабану лебедки. При ослаблении замыкающего каната и удержании грейфера на весу поддерживающим канатом челюсти грейфера под влиянием собственной силы тяжести раскрываются и в таком состоянии опускаются на захватываемый материал (рис. 19, а). Натяжением замыкающего каната челюсти грейфера сближаются и захватывают груз (рис. 19, б). После полного замыкания челюсти оба каната, навиваемые одновременно с одинаковой скоростью, поднимают закрытый грейфер с захваченным грузом (рис. 19, в).Опорожняют двухканатный грейфер при застопоренном поддерживающем (подъемном) и ослабленном замыкающем канате (рис. 19, г).
Рис. 19. Двухканатный грейфер
Сопротивление внедрению челюстей грейфера в материал зависит от физико-механических свойств материала, профиля режущей кромки и геометрической формы челюстей. Усилие смыкания, которое может быть развито челюстями, зависит от массы грейфера и кратности замыкающего полиспаста. Чем больше сопротивление материала внедрению, тем больше должна быть масса грейфера. При недостаточной силе тяжести грейфер будет плохо внедряться в материал и не полностью заполняться, а при избыточной массе зарываться в материал. Силу тяжести грейфера можно менять, навешивая на него или снимая с него специальные грузы. Одноканатный грейфер (рис. 20) навешивается на крюк крана при помощи каната 1, который, проходя через отверстие в головке грейфера, огибает блок 2, расположенный на рычаге 3. Вторым концом канат закрепляется на головке грейфера, образуя полиспаст. Рычаг 3 шарнирно связан с правой челюстью 5 при помощи оси 4. При опускании грейфера в раскрытом состоянии на материал и дальнейшем ослаблении каната рычаг 3 поворачивается на оси и крюком 6 зацепляется за палец 7 нижней траверсы. При подъеме крюка канат 1 стягивает нижнюю траверсу с головкой, вследствие чего происходит сближение челюстей и захватывание материала (рис. 20, в). Опорожнение одноканатного грейфера на весу происходит при расцеплении крюка 6 с нижней траверсой, что осуществляется рычагом 8 и вспомогательным тросиком 9 (рис. 20, а) или ослаблением подъемного каната после установки грейфера на штабель (рис. 20, г).
Рис. 20. Одноканатный грейфер
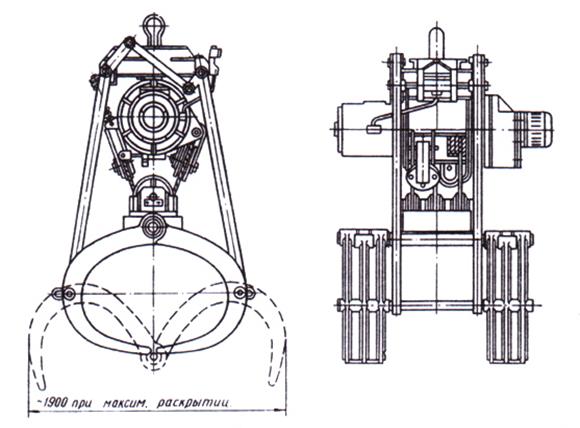
Моторный грейфер (рис. 21) подвешивают к крюку крана за петлю, предусмотренную на его оголовке.
Рис. 21. Моторный грейфер Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1555; Нарушение авторского права страницы

 ,
, 
 ,
, 



 м, или тяжелых объемных элементов со смещенным центром тяжести, например объемно-балочных конструкций.
м, или тяжелых объемных элементов со смещенным центром тяжести, например объемно-балочных конструкций.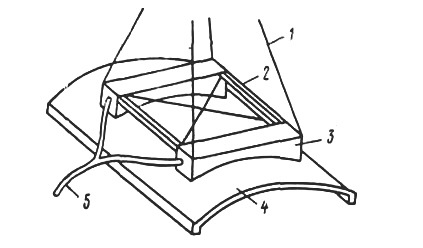



 и
и  - проекции плеч рычагов на вертикальную ось, м.
- проекции плеч рычагов на вертикальную ось, м. такими, чтобы 2
такими, чтобы 2  были больше G.
были больше G.
 100).
100).
 - коэффициент трения между эксцентриком и грузом;
- коэффициент трения между эксцентриком и грузом;  - коэффициент трения между грузом и задней стенкой захвата.
- коэффициент трения между грузом и задней стенкой захвата.